Activity
Ну, учитывая, что Питер - могу отсыпать по себестоимости - лежат где-то кусок ленты и просто светодиоды россыпью.
Было бы здорово! У меня хекса H-500 и светодиоды нужны крепить с двух сторон т.к. там стоят контроллеры моторов, т.е. получается нужно 12лент по 3 светодиода. Будет у вас столько? Как с вами связаться?
F4BY.
Я имел ввиду LED-контроллер а не полетный контроллер.
Это бесполезно, так как этот контроллер рассчитан только на светодиоды со встроенным контроллером типа WS2812. В комплекте должны быть 4 полоски именно таких светодиодов. Обычными он управлять не умеет.
Понятно. В комплекте не было таких лент.
Можете посоветовать другой котроллер, который подойдет для обыкновенных светодиодов, с выходом +5в?
Так управление-то должно быть со стороны Mavlink, т.е. оттуда led-контроллер должен получать сигнал арминга и т.п. и соответственно управлять как-то диодами. В мануале-то что-то есть? Попробуй в Mavlink rx-tx местами поменять, бывает китайцы их путают.
Ну это понято, что со стороны mavlink. Я воткнул девайс в порт telemetry 2 родным кабелем который в комплекте, поэтому врядли tx/rx перепутан (кстати, там только в одну сторону pix->девайс).
Также сконфигурил согласно этому мануалу:
Мануал был найден от похожего контроллера, продающегося на ali.
Мой вопрос вот в чем: мне нужно подрубать светодиоды на выход “s”? Там в конечном итоге должно появиться +5v в нужный момент?
Коллеги, купил MavLink LED Controller, у него выходы “+”," -", “s”. У меня обыкновенные светодиоды на коптере, которым нужно 5 вольт просто (Я установил пиксу на Tali H-500). Подключаю к выходу “S” этого LED-контроллера светодиоды, они еле-еле тускло моргают. Подключаю к выходу “+” - они горят постоянно и вроде как не управляются…
Или на выходе “S” PWM и нужно еще ставить что-то что понимает PWM?
После калибровки выдается отчет, по каналам показывает минимальные и максимальные значения. МП версии 1.3.41, прошивка AC 3.3.3
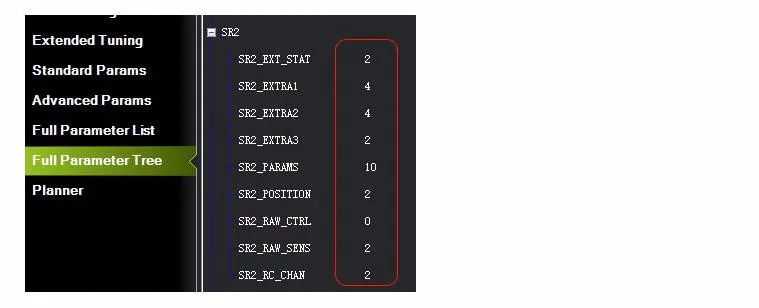
Проверил у себя. После калибровки действительно показывает 16 каналов в окне, однако, по каналам CH9-CH16 0-0. Тоесть, получается пикс не видит эти каналы по SBUS.
MP 1.3.41, прошика 3.3.3
После калибровки показывает все 16 каналов, в параметрах их тоже можно найти.
После калибровки RC? На вкладке калибровки RC в MP? У меня там больше 8 ни разу не было, может я что-то неправильно делаю?
Пикс с прошивкой 3.3 видит по сбас 16 каналов, но задействовать 9+ каналы мне тоже не удалось.
Придется чем-то жертвовать. На шестой канал повесить питч камеры, на седьмой - затвор и на восьмой - шасси.
Как показывает практика ролл и яв камеры не особо и нужен. С шассями тоже не все так хорошо, логика работы мне не понравилась, если в ручном опускаются-поднимаются, то в автомате не хотят, и наоборот, в авто работают, в ручном нет.
А как вы поняли что пикс видит 16 каналов, на вкладке RC calibrating только 8…?
Ролл камеры может и не нужен, а вот яв точно нужен.
Шасси очень нужно чтобы контроллером управлялись, чтобы при fail safe как минимум он их выпускал, а то сесть на подвес за $300 тоже не хочется…
А мануал на ваш пульт есть? Дайте ссылку, посмотрим.
Нашел тут www.google.ru/url?sa=t&sourc...emu1xnC9jEHinQ
Посмотрите пункт 4.6
Или тут www.google.ru/url?sa=t&sourc...-Os2PlpDA_Bv6A
смотреть страницу 93
У меня стояла прошивка 1.6A (simplified edition, 100mw) и в ней я не видел этих пунктов. Сейчас поставил 1.5A (standard edition, 100mw) и появилось куча доп настроек.
Спасибо за наводку!
А мануал на ваш пульт есть? Дайте ссылку, посмотрим.
Нашел тут www.google.ru/url?sa=t&sourc...emu1xnC9jEHinQ
Посмотрите пункт 4.6
Или тут www.google.ru/url?sa=t&sourc...-Os2PlpDA_Bv6A
смотреть страницу 93
Ок, спасибо, попробую, но видимо уже на выходных.
В любом случае, CH5 занят под flight mode, остается три канала всего. А мне нужно камера в трех плоскостях + затвор камеры + шасси, т.е. 5.
Больше чем 8 каналов никак не получиться через SBUS передать в пиксу по SBUS или какими-либо другими способами?
Да что же вы такое говорите-то?!
У меня точно такая же аппа и ВСЁ миксуется как хочешь, на родной прошивке!!!
Веернее даже немного не так: на вашем приёмнике каналы с 1 по 8 идут в РРМ, а с 9 по 12 выходят в PWM.
Пикс понимает ТОЛЬКО первые 8 каналов и всё. С 1 по 4 канал - управление, 5 канал - переключение режимов, а вот с 6 по 8 канал можете использовать для управления выходами AUX.
Всё. Каналы кончились… Оно вам надо?!
А с 9 по 12 канал вы к контроллеру никак не прицепите…
У меня сделано так: 5 и 6 каналы смиксованы на переключение режимов = 6 режимов, 7 и 8 каналы пока пустые. Я на них цеплял автотьюн и ещё что-то. 9 канал с приёмника - ретракты и с 10 по 12 каналы - управление 3 осевым подвесом.
Гекса летает в авто режиме, а ты сидишь, крутишь подвес и наслаждаешься видами!
Я и говорю, что каналы 9-12 выходят в PWM, хотя допускаю что их “копия” как-то может быть отправлена в S-BUS (если это позволяет протокол).
Замиксовать или поменять местами каналы на пульте вручную с родной прошивкой - не знаю как, если знаете - ткните меня носом в пункты меню.
А к каналам 9-12 через PWM у меня сейчас и прикручен подвес но МИМО контроллера, а хотелось бы ЧЕРЕЗ контроллер, чтобы он мог управлять в т.ч. и камерой.
Скорее всего тут собака зарыта!
Да, скорее всего, проверю.
А насчет LED-контроллера - они на квадрики, а у меня хекса - мне цеплять паралелльно?
Проще тогда такую штуку купить и всё:
Куплю, спасибо.
А куда были включены провода от регулей?
Стандартным трехпрводным коннектором в их кастомный APM 2.6. Видимо у них третий провод был распаян под светодиоды… (регулятору ведь земли и сигнала достаточно, питание у него свое)?
Приемник к пиксу подключен напрямую S-BUS или через PWM-миксер отдельными каналами? Просто если отдельными каналами, то кто мешать воткнуть каналы 9-11 применика в каналы 6-8 PWM-миксера?
Приемник подключен через S-BUS. Через миксер его не подключить т.к. на выходе премника S-BUS + AUX 1-7, т.е. нет выходов CH1-CH4 в виде отдельных каналов.
- Светодиоды на контроллерах моторов не горят когда коптер в ARMED (на родном контроллере APM 2.6 все работало
И что насчет этого?
Контроллеры стоят такие:
myrcmart.com/brushless-speed-controller-wst15ahg-p… (4шт, по 3 светодиода с каждой стороны, управляться должны как-то через PWM видимо, т.к. доп провода нет)
myrcmart.com/brushless-speed-controller-wst15ahr-p… (2шт, с доп. синими светодиодами выведенными в виде отдельного контакта, в оригинале использовались для определения точности GPS)
Переназначить разве нет возможности на 5-8?
Нет. В этой аппе нельзя ничего миксовать. Пробовал прошивать ее в прошивку deviation, там можно миксовать но она кривая в доску, начиная от меню и заканчивая файловой системой.
Вот тут rcopen.com/forum/f4/topic292148/2089 мне написали.
Один из основных моментов - с аппаратуры DEVO F12E каналы управления камерой это 9-12. Как настроить Input ch 9-12 на вкладке “Camera Gimbal” в MP? Там “Input channel” только до 8-го выбрать можно. Как с этим бороться?
Также 5 вольт нужно отдельно завести, на AUX выходах пиксы нет питания, правильно?
И как тебе его работа? Устраивает? У меня просто аналогичный (Quanum Q-3D), так вот работой не особо доволен, нету полного эффекта стабилизации. Есть пример видео как снимает твой подвес?
Нет, купил недавно только, еще не летал с ним, пока с коптером разбираюсь чтобы стабильный был, боюсь пока с подвесом, дорогой все-таки…
До этого стоял Walkera G-2D(пока не разбил его), вроде боле-менее было, примеров видео тоже не осталось, т.к. просто баловался…
А что за подвес? Шторм уже вроде можно подключить
Walkera G-3D
Подвес прекрасно с приёмника управляется и не надо грузить контроллер лишними фишками.
Ну а какже камеру направить во время полета в автомате?
А чем APM не устроил?
Пульт у меня 12-канальный, DEVO F12E
- Туда ардупилот 3.1 максимум влезает, а поддержка >8 каналов только в 3.3. Да и всетаки наверно 3.3 посвежее и постабильнее должно быть…
- Хочется управление подвесом камеры через контроллер сделать а не напрямую с ресивера.
Установил Pixhawk на TALI H-500 вместо штатного контроллера, в принципе все работает, коптер летает но
- Светодиоды на контроллерах моторов не горят когда коптер в ARMED (на родном контроллере APM 2.6 все работало)
- Как заставить pixhawk передавать телеметрию на родной ресивер Walkera RX-705? Пробовал подрубать TX от порта telem 2 пиксы на второй контакт ресивера (с родного контроллера так телеметрия шла) - пульт ничего не увидел.
Кто в теме - подсскажите плиз…
В итоге, купил PixHawk, поставил вместо родных мозгов, установил послежнюю прошивку (3.3) в принципе все работает, но есть ньюансы:
- Светодиоды на контроллерах моторов не горят (даже не моргают при включении)
- Светодиоды GPS (голубые) не знаю куда подключить (хотя наверно они не нужны)
- Пробовал соединить отправить TX порта telemetry с 2-м контактом штатного ресивера, чтобы отправить на пульт телеметрию - не заработало.
Есть мысли у кого-нибудь?
Телкметрия была и работала с оригинальной проштвкой контроллера (до ardupilot) и жо установки Bluetooth 2401. Передавалось напряжение АКБ и координаты GPS.
Для начала настроить Mode 2.
Точно, спасибо еще раз! А то я уже начал конфигги искать для заливки через DfuSe…
В итоге пульт управляет коптером, но телеметрия с коптера не идет (даже напряжение батареи) и пульт пищит раз в секунду (так было и до перепрошивки, после замены контроллера, я писал тут.
Вообще на пульте три напряжения Voltage - 1 internal и 2 external, насколько я понимаю, как минимум одно из них должно показывать что-нибудь…
Может подскажешь куда дальше копать?
Для FPV передатчиков Devo прошивки сырые и никто ими толком не занимается, поскольку владельцев очень мало. Лучше использовать оригинальную прошивку.
Да, от добра - добра не ищут.
Перепрошился обратно в walkera, висит на "Warning “Throttle stick”… Видимо файловая система затерлась или еще чего в этом духе…
Кирпич или есть способы?
Это прошивка для Devo 12s, а не для Devo F12E. К тому же Devo F12E как-то по другому прошивается, с помощью специальной утилиты.
Да, спасибо. Нашел в nightly - www.deviationtx.com/…/542-2016-09-22?download=3466…
Прошил с помощью DeviationUpload-0.8.0.jar на Linux. (На винде че-то не получилось).
В итоге имею: меню глючное, некрасивое, кривое по сравнению с оригинальным валкеровским.
При коннекте по USB - один файл “devo.fs”.
- Как туда залить настройки
- Есть ли готовая модель TALI H500 у кого-нибудь?
Есть пульт DEVO F12E, с прошивкой 1.6B от Walkera, решил его перепрошить.
- Залил firmware deviation-devo12-v5.0.0.dfu
- Залил lib devo12-lib.dfu
Все успешно прошилось. Попытался включить с зажатым “ENT” чтобы USB заработал - не включается. Просто включаю - не включается.
Прошил назад валкеровской прошивкой 1.6B - нормально включился.
Может кто сталкивался с подобным?
Купил у KachesGM еще один полетный контроллер.
Слил с него конфиги через mission planner. Перешил на нем загрузчик на ардупилотный (Через SPI программатор). Проапдейтил через APM софт на 3.2.1 (это последний который влезает туда).
В итоге пульт управляет коптером, но телеметрия с коптера не идет (даже напряжение батареи) и пульт пищит раз в секунду.
В Mission Palnner напряжение батареи нормально видно.
Данные о напряжении батареи на пульт попадают с контроллера через data или сам радио ресивер их должен передавать? Может кто знает, как вылечить?
UPD: Все три Voltage на пульте (DEVOF121E) показывают 0.0 вольт а не inhibit.
Купил BT-2401, подрубил к H-500. Если включаю блютуз - не видит пульт. Думал сделать ресет настроек, по-глупости сделал “setup erase” в консоли. Теперь не сохраняет больше параметры. Вычитал что нужно залить родной конфиг через SerialAngel. Искал в инете конфиг - нашел только от QX-350. Залил его, но там много несоответствий - батарейка не 11 вольт и тд.
Просьба к форумчанам у кого есть H500 с заводскими настройками - можете сделать save config через SerialAngel и выложить его здесь?