Activity
В принципе озвученные 2 момента связаны между собой. Весьма неспеша едет пропадаптер для движка на квадр emax mt3110 700kv,про который я писал в прошлом посте.А пока он едет я уже 1 раз полетал. Но нифига не удачно!
Подробности я озвучивал в теме про АРМ, а тут все таки мысли насчет пропадаптера.
Так вот, после очередного падения квадра из-за бешеной раскачки по роллу в Лоитере шлепнулся квадр и погнулся 1 адаптер под пропеллер. И тут встал вопрос, что в общем то я скрепя сердце один заказал и стоил он 500р. На этих адаптерах нахрен можно разориться. Ну и т.к. на движке есть возможность поставить проп или через адаптер, либо напрямую, но тогда нужен проп с 3 отверстиями, 2 из которых под крепление к движку. Пропов 12 дюймов я не нашел таких, они все с одним отверстием, но есть пропы под 13 дюймов со всем необходимым.
Вот и 2й момент опишу. Я мысленно согласен поставить 13е пропы, потратив на комплект 1-1.5 т.р. В связи с чем я решил попробовать таки снять адаптеры, но прикручены они на винты под 2мм шестигранник (коих я сточил уже 5 штук 😦 ) и посажены на синий фиксатор. Т.к. на имеющемся шестиграннике грани уже слизаны почти, а фиксатор отрабатывает свои деньги получил я в ответку хреном по лбу.
Отсюда главный вопрос: как выкрутить винты, посаженные на синий фиксатор? Просьба не предлагать купить очередной шестигранник, он 100% сточится.
Я пробовал нагревать паяльником, но бестолку, я смачивал спиртом, тоже результата 0.
Продолжаю сборку своего калеки😆
Немного отступления. Обыскался гайку на М6 с левой резьбой, хрен найдешь в наличии, что в Китае, что у нас, в основном есть М5. Уже всячески потерял надежду найти в наличии, но вдруг обнаружил на али, чисто случайно нужный кэп нат (cap nut), правда нифига не дешево, но заказал. Жду когда придет и теперь у меня самозагят таки будет на 4х движках, а не на 3х. Также решил спросить в саппорте EMAX,так и спросил, есть ли адаптер для движка 3110, а они в ответ говорят, что “Нет, нету”. А после того, как нашел на али адаптер для 3506,3515, 3110 (один адаптер подходит к нескольким движкам) спрашиваю снова саппорт EMAX, а подойдут ли адаптеры от 3506 на 3110 иииии, чудо, они отвечают, что да, подойдет!😆 А почему сразу то не посоветовали?
Немного отступления1. Собираю я квадр и в предпоследнем монтаже подключал питание к видеопередатчику eachine ts840 40ch,а провод с питаловом не отсоединил,а открутил антенну и убрал квадр до следующей сборки. Достаю квадр для продолжения монтажа, решил проверить функционирование ОСД, телеметрии и проч.
Подключаю я,значит, аккум и вижу как у меня на видеопередатчике загораются циферки, время замедляется, я перевожу взгляд на коннектор под антенну, а ее нет!!! Тут время ускоряется и я отключаю питание видеопередатчика. Каково же было мое удивление, он не сгорел, синий дымок, живущий в платах на волю не вышел, передатчик ни капли не нагрелся!❗😃
На работоспособность это не повлияло, все работает. Я спокоенB-)
Вот что насобиралось

По сборке квадра осталось по минимуму!
Для подвеса hakrc storm32 ремкомплект уже пришел и подвес ждет своего часа по восстановлению
Сижу я, починяю примус квадр, достал коробочки из-под движков emax mt3110 700kv.Жена берет одну коробочку и вынимает оттуда картонку, на которой параметры движка

но вы тоже уже присмотрелись?
SURPRIIIIIIIIIIIIIIIIIISEEEEEEEEEEEE

надеюсь, это проста наклейка и производитель пожалел перепечатывать картонку на новую и просто наклеил наклейки. Ситуация на коробках 5 движков одинаковая,маркировка на самих движках как на наклейке,т.е. та, что надо.
P.S. ищу гайку М6 с левой резьбой, а в идеале гайку под мой адаптер,конусную
Только я, значит,обрадовался, собрал,поднастроил и решил полететь как…непропай минусового провода к PDB перечеркнул последние 5 месяцев и несколько тысяч рублей. Этот непропай все время меня преследовал.Но я все проверил,пытаясь оторвать провода после пайки,все держалось.Похоже что плохо проверял. Поехали!
Общий вид, чего стало с дроном. Погнулю алю трубки и профиль,сломан текстолит. Задний правый движок скорее всего под замену. При ударе отлетел проп и держащая его гайка, их не нашел

Побита коробка от GPS,оторвались провода от платы. Оторвалась стойка GPS,надеюсь просто выпала и ее можно вставить


Вот он виновник, справа снизу минусовой провод,лежит поверх плюсового

В расход пошла камера xiaomi yi.Поломан корпус, западает кнопка wifi,объектив под углом,карточка на 64 Гб в треснула и не работает.

Вот на этот луч пришелся удар


Вот так рас3.14дорасило 3d подвес от hakrc storm32. Пожалуй,его, почему то мне жаль больше всего.


Треснул профиль в противоположном по диагонали от загнутого луче

Треснул текстолит

Помялась 3s 6000мач батарея.На средней банке видно, что у батареи слоистая структура


Вот и все.Когда соберется следующий коптер,не знаю, руки опускаются при подсчете финансовых потерь😢😢
Он полетел!
раму сделал и консультировал по разным вопросам Сергей ssilk
за что ему СПАСИБИЩЕ!


За время сбора рама подросла вширь,т.к. не вставал ПК с демпферной площадкой между трубок, Сергей переделал раму.



ПК: APM 2.8 (прошил на 3.1.5) с модулем измерения напряжения и тока
приемыш: radiolink r12ds
подвес: hakrc storm32
видеопередатчик: eachine ts840 40ch
телеметрия: HC-06 Bluetooth (обсуждалась тут у меня в дневнике)
OSD: micro minimosd
PDB: matek v3.1 mini PDB 2-6s с бэк на 5В (реально выдает 4.96В, питает APM и OSD) и 12В. Слышна работа элементов,что-то жужжит при подаче питания
антенны для видео: на передатчике клевер eachine на 4 лепестка, на приемнике 2 клевера eachine по 6 лепестков
аппа: radiolink at10ii
экран под видео: eachine LСD 5802S
камера курсовая и пишущая: xiaomi yi с объективом 4.35мм
модуль GPS с компасом: была эпопея с компасом akm8975 (GPS ublox m8n и компас от readytosky). В итоге продавец с Али через 2.5 месяца после закрытия заказа был оповещен о проблеме и спустя 2 недели прибыл новый модуль ublox m8n с компасом l883, который работает! Что реабилитировало продавца в моих глазах на все 100%.
В итоге часть компонентов все равно у него брал.
светодиоды и управляющий модуль: светодиоды на 12В приехали,жду модуль управления
движки: emax 3110 700kv
регули: jmt simonk 30a
держатель антенн приемника: такой
кольца под алю трубки
пропы: ATG 1238
провода от регулей к движкам были куплены 2*1 мм2
демпферы на подвес
аккумы 2*3s 2200 мач и 3s 6000 мач
=====================
Вес получился не малый, думал будет чуть меньше, с аккумом на 3s 6000 мач 1875 гр, с 2*3s 2200 мач на 100 грамм меньше. Если будет летать из 10 минут, то я буду только радB-)
Отлетал (видео в ВК первое, второе) хотел подкрутить PIDы, но был сильный ветер, имеется 2 лога телеметрии. Записались через блютузину и приложение на телефоне Tower, с полетника через МР почему-то не скачиваются (возможно потому что по воздуху, а не по проводу подключаюсь), ну или я еще плохо изучил вопрос со скачиванием лога с АРМ.
ссылка на логи (буду рад, если кто глянет и подскажет что хорошо и что плохо в данных логах)
Фух, ну вот вроде и все. Впереди еще настройка и долгожданные полеты по камере.
П.С. ссылки на компоненты ни в коем случае не являются рекламой! выложил в надежде, что поможет кому, кто ищет что-то подобное
Сборка квадра пока затормозилась, но доходят всякие ништячки с одного там китайского магазина.
В связи с тем, что надоело отключать/подключать APM кабелем к компу, а также захотелось управлять с телефона (а как вы знаете, что лень - двигатель прогресса) был заказан bluetooth hc-06.
Чиркану инструкцию, чтоб все сразу в одном месте было, вдруг кому понадобится.У меня APM 2.8,windows 8.1 и Mission planner 1.3.36.
Выглядит плата так:


Подключал через плату CP2102, RX-TX,TX-RX.
Затем нужно было проверить работоспособность и настроить. Можно взять любую прогу для работы с com-портами, хоть putty,но во многих примерах подключаются через arduino ide - мониторинг портов,я так и сделал. Соответственно указав com-порт, который определился при подключении. Скорость по дефолту 9600 бод, ее необходимо сменить на 57600. Для начала проверяем командой AT работоспособность платы,в ответ получаем “ОК”, потом для красоты задаем имя AT+NAMEname (name - пишем любое, слитно),можно посмотреть версию прошивки командой AT+VERSION,после этого задаем скорость работы с платой блютуза 57600 командой AT+BAUD7. По дефолту пинкод 1234, но его можно сменить командой AT+PIN 1234(указав желаемый пинкод,вместо цифр указать свой).
Теперь плата обозвана, настроена на нужную скорость.
Теперь можно сделать сопряжение с нашим блютузом. Дальнейшую часть мануала приведу в видео с ютуба, по которому я делал:
По сути выясняем к какому com-порту привязалось блютуз соединение (в моем случае com4), проверяем, чтоб скорость порта была 57600.
Небольшое лирическое отступление. У меня была версия MP 1.3.37 и через нее ну никак не хотела работать инструкция, которая будет дальше, по этому снес анинсталлером все остатки от МР и поставил версию 1.3.36. По сути она дублирует все проделанное выше, но у меня не получалось это все провернуть, пока я не сменил в терминале скорость самого блютуза на 57600. Может у кого живой МР то и проделывать деинсталяцию не придется.
Я после всех перенастроек на всякий случай прошелся по инструкции:
УРА! :clap:Все таки заборол я свой блюпуп! Уже опускались руки, хотел открывать спор на али. Договорился с китайцем, что свяжемся сегодня по скайпу и через тимвивер он настроит мне сам. Но вечером пока менял интерфейс винды на инглиш для китайца и подготавливал FTDI модуль, решил еще раз попробовать сам. Через любые программы типа Термита и ардуину блюпуп на команды АТ не отзывается.
Не давал мне покоя сам мишнпланер с его меню Bluetooth Setup. В итоге именно оно и помогло!
Итак:
- Подключаем блюпуп к компу через FTDI модуль (TX-RX, RX-TX). Светодиод на блюпупе должен моргать.
- Смотрим получившийся Com порт FTDI (у меня 7)
- Запускаем мишнпланнер
- Заходим в Bluetooth Setup
- Выставляем там Имя (любое), скорость работы (57600) и пароль (1234)
- Выставляем в настройках подключения мишнпланера Com порт FTDI ( у меня 7), скорость 57600.
- И нажимаем кнопочку Save Settings в меню Bluetooth Setup. Модуль FTDI начинает моргать.
- Появляется окошко Sucessfully programmed. Готово
- Винда сама сразу же находит новое блютус устройство и предлагает спариться с ним, что и делаем.
- Отключаем блюпуп от FTDI и подключаем к APM.
- Теперь выставляем в настройках мишнпланнера Com порт БЛЮТУСА (у меня 10), скорость 57600.
- Нажимаем CONNECT и успешно соединяемся!
У меня все. Всем спасибо за помощь!:drinks_cheers:
Тоже хотелось получить заветное окошко с сообщением Sucessfully programmed;).
В случае, если сразу после перенастройки скорости сопрягли блютузину, то ее лучше удалить,потому что МР при подключении предлагает ее спарить с компьютером (как в п.9 инструкции) и соединение не заработает. Удаляем обозванное устройство и далее выполняем п.11 и 12 инструкции. После этого у меня заработало все на ноутбуке.
В телефоне через приложение Tower (для андроида) коннект приходится чуть подождать и подождать когда пойдут данные, буквально секунд через 30 все работает.
Надеюсь кому поможет.
П.С. жду когда придет внешний компас.
П.П.С. писал китайцу по своему модулю GPS, в котором не работал компас, он обещался прислать новый модуль:blink:
П.П.П.С. Редитускай действительно отправил новый GPS-модуль, даже несмотря на то, что я обратился к нему аж через 2 месяца после получения посылки. Ну и еще добавлю,что модуль успешно пережил переполюсовку:excl:
Пока сбор нового квадра задерживается,а руки чешутся и хочется,чтобы время не прошло зря, я решил попробовать решить проблему с компасом на плате AKM8975.Компас расположен на модуле GPS m8n от readytosky.Выглядит так (компас слева вверху):
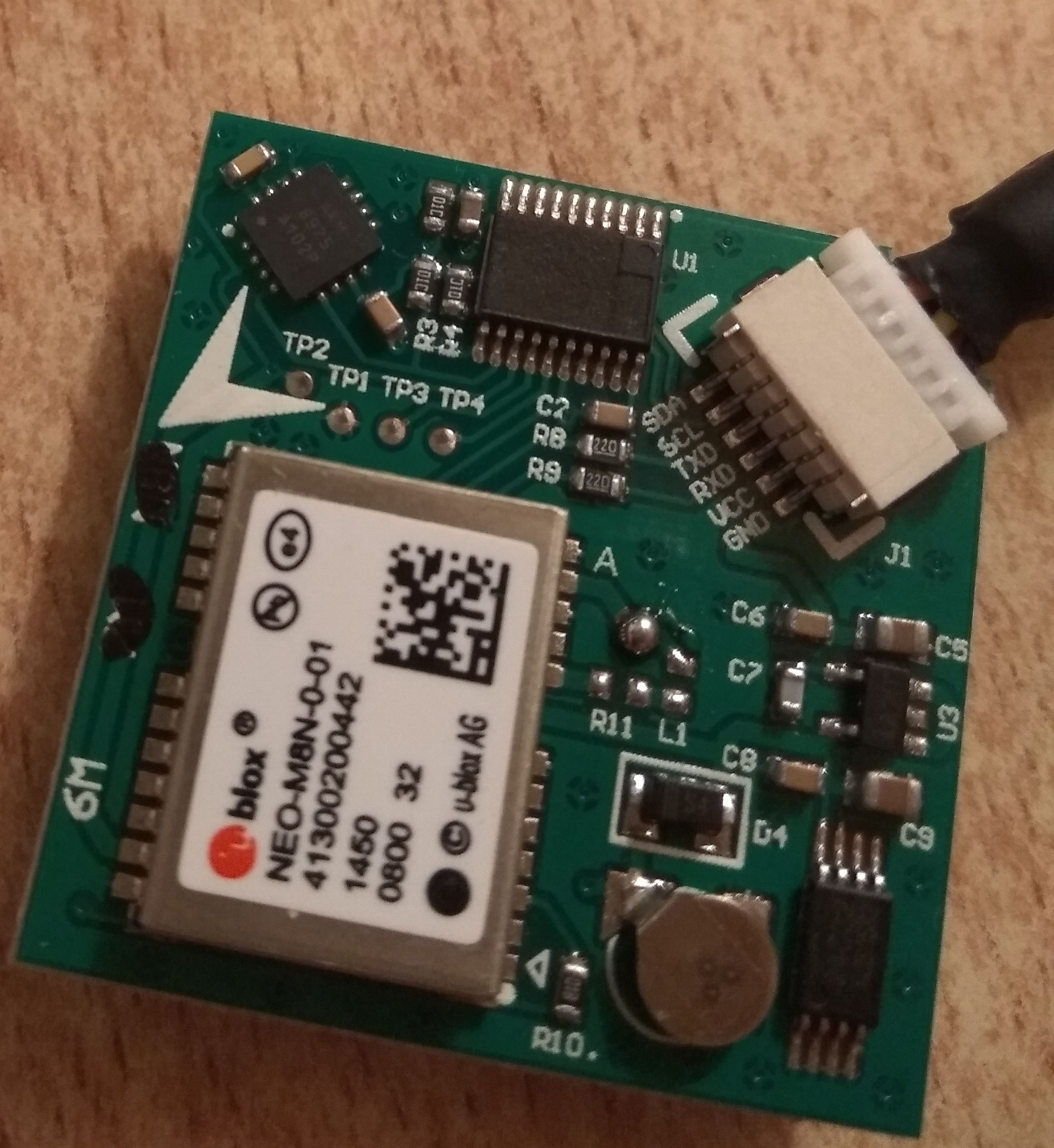
Схожие проблемы есть и на других GPS от этого продавана,а после углубления в поиски оказалось,что и вовсе пока существует APM, существует и проблема Bad Compass health,которая в моем случае не решилась ни одним из найденных способов. в Мишн планере был запущен терминал и там я увидел ошибку COMPASS INIT ERROR.Прошивка у меня 3.2.1,оттуда вырезана поддержка CLI,но и этого было достаточно. Значения mx my mz меняются, оффсеты почему-то снова уехали до огромных величин, с металлом рядом компас вроде не держал:(проблем от наводок замечено не было ранее при калибровке. Наткнулся на пост на гитхабе.Там такой же компас, только модуль ГПС другой.И ситуация следующая, ПК у человека SP Racing F3 и там не определяется этот компас из-за отсутствующих драйверов этого компаса в прошивке для ПК. Я не шарю в прошивках, но там в обсуждении пишут фразу " I don’t think this chip is actually an AK8975 if it’s being detected as a HMC5883 .They have different i2c addresses, so there should be no way that it works and detects it when set to HMC5883, yet it does. Also, I just checked and betaflight is detecting it as HMC5883 too."
и ниже следующий пост с фразой:
“With independent program I found out that AKM8975 mag chip is emulating HMC5883 (or strange chip is doing i2c logical translation to HMC5883 registers) so that is why it is detected as HMC5883”.
Если сделать вывод,то оба человека пишут,что компас AKM8975 эмулируется неизвестной платой U1 в компас HMC5883,потом плата U1 упаковывает сигналы с ГПС и компаса и отправляет их в ПК. В итоге у 2х человек решилась проблема с извлечением неизвестного чипа (на моем фото он сверху с маркировкой U1). Вот такой вариант:
…githubusercontent.com/…/35133765-106f31… (1.6 MB)
Вроде правильно понял весь этот пост.
Подводя итог вариантами решения остается софтварный мод прошивки ардукоптер (по аналогии с модом в посте на гитхабе) в части компаса (это для меня вовсе недосягаемо) с не совсем понятными последствиями и железячный мод, с удалением платы U1 и подпаиванием пары проводков.
важный UPD от 11.03.18!!! вариант с отпайкой чипа у меня тоже не заработал!!!в связи с чем едет новый компас.
В прошлом посте позорно не запостились несколько фото,потому что вставлял ссылки с яндекс.диска, а не яндекс.фото. Исправляю.
-
Старая валкера qrx350 pro
-
Аккум от валкеры 3s на 5200 мач. После переразряда
-
Размещение регулей на новом квадре. горизонтально не помещаются, придется размещать вертикально
===============================================================
Ну а теперь свежие новости: поставлена плата питания, ПК, движки установлены как надо, поставил стойку для GPS,но,похоже ее придется перенести вперед,потому что кабель чуть внатяг




Радует, что двигатели завелись почти сразу,на 4% газа. Не радует, что после калибровки акселерометра и компаса оффсеты последнего заметно подросли. Надеялся. что вынеся на стойку GPS с компасом, у него оффсеты будут нормальными.
С направлением компаса разобрался, все отлично отображается, сообщение Bad Compass Health не появляется до момента пока GPS не словит спутники.Как только появляется gps fix в МР, так сразу и сообщение о здоровье компаса.
Здравствуй, дорогой дневник
В сентябре 2016 был подарен квадр walkera qrx 350pro.Полетал, понастраивал в МР согласно wiki и профильной теме форума в 300+ страниц, эффект был WOW, оно летает!!! Затем был почти сразу продан стоковый подвес и пульт devo f7 и были они заменены на подвес от HAKRC Storm32 и аппу radiolink at 10 II с приемышем r12ds. Весить стало это все 1390 грамм с 2мя аккумами.


Стоковая батарея валкеры была заменена на 2 штуки HRB 3s 2200 мач в связи с тем, что стала выглядеть так,ну правда я ей чуть помог в этом в связи с переразрядом,но она итак подвспухшая была


Совсем недавно весь этот конструктор был продан и заказан другой конструктор (батареи,подвес,приемник,микроминим осд, видеопередатчик были оставлены). Все,кроме рамы было заказано на алиэкспрессе(до прочих сайтов так руки не дошли).
Сетап таков:
ПК арм 2.8 (на демпферной площадке) с gps m8n на стойке и компасом
регули 30а xt-xinte simonk
движки EMAX 700KV MT3110
пропы ATG 1238
плата распределения питания matek 3.1
рама была заказана у Сергея ssilk
и с движками она выглядит так


Регули на данную раму рядом друг с другом горизонтально не помещаются:( зато поместились вертикально, на лучи не хочу их крепить.
В связи с тем, что сначала выбрал одну плату распределения питания, а потом после почти готовой рамы нашел и заказал другую,в итоге не совпали места монтажа для платы Matek:(. Договорился с Сергеем переделать плату под ПК и плату питания.
Вопрос с питанием на APM 2.8 был решен с помощью PDB Matek,по линии 5В там выдается 4.97В. Туда же хочу запитать и micro minim OSD, надеюсь просадок по питанию не будет.
После подключения GPS и настройки APM 2.8 при калибровке компаса стандартная ошибка в МР BAD COMPASS HEALTH. В инете единых вариантов подключения GPS и компаса не нашел. Либо перемычка для встроенного компаса убирается и все подключается в 2 соседних порта GPS и компаса, либо тот же расклад, но с перемычкой, либо без перемычки компаса, но провод компаса подключается в l2c,а не под порт GPS. По части оффсетов все значения меняются (2 и 3 значения велики), значения mx,my,mz тоже меняются. Одна надежда,что калибровал я дома, а рекомендуется на улице. Направление по компасу в MP меняется в противоположные стороны относительно того, как я поворачиваю компас, значение для компаса стоит ROTATION_ROLL_180 и COMPASS_EXTERNAL = 1. Буду еще изучать вопрос,но и может вдруг кто откомментирует решение.
Следующим действием была калибровка регулей. Через АРМ не получилось,мигает куча светодиодов, но при верхнем положении ручки газа ничего не происходит. Пришлось калибровать по одному через приемник r12ds,переключив его в режим PWM. Калибровка проходит, но движки стартуют на 10% ручки газа. Теперь предстоит решить как запустить движки через АРМ:)
Ну вот пока как-то так…ну паяю я еще так себе😵