Activity
Шаги для воспроизведения:
- Открываю Кабинет -> Личные сообщения -> Входящие
- Открываю любое личное сообщение
- Заполняю быстрый ответ
- Жму “Отправить сообщение”.
Ожидаемое поведение:
Отправленное мной сообщение доступно в разделе “Отправленные”.
Реальное поведение:
Раздел “Отправленные” пустой. При этом если следом ответить на другое сообщение, появляется предупреждение, что слать ЛС можно не чаще раза в 60 секунд. То есть, сообщение предположительно ушло, но не попало в мои “Отправленные”.
Если точнее, то отвечал на pmid=7249055 господину Алексею Воробьеву ( rcopen.com/member70247 ).
Это баг или фича? Если фича, то очень неприятная, так как совершенно непонятно, получил ли адресат сообщение или что-то сломалось.
Видеопередатчик TS832 довольно сильно греется. Но не до ожогов. При этом все работает, питаю от 12 В как и положено. Стоит беспокоиться или это для него нормально?
Как правильно хранить LiIon/LiPo аккумуляторы для продления их срока службы? Максимально заряженными, разряженными, или в каком-то промежуточном состоянии?
Наткнулся случайно на этот магазин. Выглядит интересно. Среди ассортимента особенно заинтересовал полетный контроллер F4BY (тема про F4BY), более компактная версия PixHawk (на AliExpress не ищите, его там нет). Есть блог, что приятно.
Пока ничего не покупал, так как пока вроде ничего не нужно. Хотелось бы почитать ваши отзывы об этом магазине.
microhobby . ru
поэтому сейчас он взял на квадрик Session 5.
А ну это понятно 😃 Но у меня сейчас квадрик целиком стоит как Session 5, так что хотелось бы пока что-то попроще.
Я бы не сказал, что Мобиус нормальная, камера…
Оу. Ну я выше спрашивал брать или не брать, вроде никто ничего против не сказал. Как по мне, нормальная картинка:
Не могли бы вы объяснить, что с ней не так и что бы вы предложили вместо? RunCam 2 или 3?
Результат, если кому интересно:
www.youtube.com/watch?v=6UJBaw0mZWo
Картинка, как видите, оставляет желать лучшего. Хотя разобрать, что происходит, вполне можно. Отчасти сказалось и то, что смартфон не новый (LG Nexus 4) и камера в нем не сказать, что выдающаяся. Вес, конечно, большой, 170 г. Проблем с помехами не обнаружил (в телефоне все отключил).
В общем, это был интересный эксперимент, но я пошел за нормальной камерой типа mobius action cam 😃 Камера, надеюсь, еще нормальная по сегодняшним меркам?
насколько критично расположение FPV-передатчика рядом с акком???
Затестите дома без пропеллеров и узнаете. Сам аккум насколько я знаю магнитных волн не создают, но создают идущие от него провода при прохождении через них тока. Насколько это повлияет на ваш конкретный передатчик с его частотой, коррекцией ошибок и антенной можно узнать только экспериментально. Есть шансы, что никак.
Рама - f450;
Моторы - SUNNYSKY X2212 KV980;
Пропеллеры - GEMFAN 1045 Nylon Propeller;
Регуляторы - FVT Littlebee 30a;
Полетный контроллер - PixHawk;
Аккумулятор 3S - 3300;
В целом вроде неплохо. Аккум наверное лучше на 5000-5200. Ругялторов должно и на 20А хватить. Но если думаете попробовать другие моторы в будущем, можно взять и 30A.
Нашел модель рамы F450 для печати на 3d-принтере. Распечатал ABS-пластиком пару частей (у меня RepRap, на одну часть часа три уходит). Хорошая рама получается. Вроде прочная (что и не так важно так как любую часть всегда можно допечатать). Взвесил - целиком будет раза в 2-2.5 легче оригинальной F450 которая 280 г весит. В общем через недельку наверное поеду испытывать.
Летал кто-нибудь на таком самопале? Как впечатления? Вообще что думаете про раму из ABS весом 100-120 г?
Вот APM Mini стоит 30$
а PixHawk с Ali 50$ - дороже более чем на 50%, летать же более чем на 50% лучше не будет?
Вы почитайте спеку по железу (микроконтроллерам хотя бы) которые используются в APM и PixHawk. Затем прикиньте, зачем разработчики ArduPilot захотели железо получше и насколько лучшие алгоритмы благодаря этому реализовали.
Если же ваша задача сэкономить, возьмите лучше MultiWii, я думаю он баксов 10 сейчас стоит. Или Arduino Nano, думаю уже штук пять самопальных прошивок написано. Думаю на форуме найдется пара человек которые вам что-то такое с радостью бесплатно вышлют. Но насколько хорошо полетит не скажу.
В чем может быть проблема?
Почитайте спеку power module, на какой провод у него что выходит, затем спеку pixhawk, где он что ожидает. Не удивлюсь если ток и напряжение местами поменялись или что-то в этом роде.
Также заметьте, что первое время вам это не нужно. Я с обычной внешней пищалкой например летаю, подключенной прямо к батарее, так как не имею павер модуля.
С током разберусь позже.
Перед полетом либо разберитесь, либо отключите power module если не разобрались. Если показания неверные будет ложное срабатывание failsafe.
Какие логи рекомендуете включить?
Я пока забил, с дэфолтными настройками все оставил. Отчасти потому что у меня нет внешнего GPS и других датчиков. Ну что он может записать - показания акселерометра, барометра (я кстати не помню он есть в pixhawk) и компаса. Ну сложит он это в csv, дальше то мне что с этим делать? )
Не запитывается приемник r9ds(radiolink) от s.bus разъема pixawk
Питание есть на всех разъемах, насколько я помню. Но если питаете от USB (режим телепата) то скорее всего питание идет в районе 4.7-4.8 V на пины (проверьте мультиметром), а у вашего приемника наверняка в спеке сказано что ему нужны стабильные 5 V. Если запитаетесь от батареи, такой проблемы не будет.
Кстати, приемник подключается к RCIN (не важно, PPM или SBUS). То что обозначено SBUS на PixHawk - это выход, а не вход. Читайте документацию 😉
Мозг какой?
PixHawk 2.4.8. Вроде и не очень-то мотало. Сильный ветер был + эффект соскальзования с воздушной подушки из-за малой высоты. А есть пример видео как на самом деле должно быть? )
APM MiniAPM V3.1
Лучше не надо APM. PixHawk (дальнейшее развитие APM) или DJI Naza. Убедитесь, что приемник ваш умеет PPM или S.BUS, или что у вас есть переходник с PWM. За Naza не подскажу, а PixHawk на вход PWM уже не поддерживает, типа устаревший вариант, проводов много и все такое. Ваш приемник судя по картинке на bangood PPM вроде умеет, но лучше перепроверить.
И интересует вопрос: можно ли подключить PWM с выхода радио-приемника сразу к ESC? Без контроллера?
Только с трудом представляю, что это может дать. У вас выход одного канала в PWM - это закодированное положение стика или тумблера. Подавать его на один ESC бессмысленно. Разве что для тестирования.
Минимум геморроя, максимум эффективности в сборке и настройке
Ммм… случись с ним что вы сразу остаетесь без BEC, OSD, четырех ESC и полетного контроллера. Так себе идея - пихать все в одну плату.
С удивлением обнаружил, что на форуме нет темы, посвященной этому магазину. Решил вот завести, давайте его обсудим.
Мое личное впечатление - похоже, что в основном они покупают на тех же HobbyKing / AliExpress и перепродают с наценкой (иногда большой, иногда вполне адекватной).
В настоящее время в основном использую этот магазин для мелочевки - светодиодных лент, проводов, термоусадок, разъемов 3.5 мм и всякого такого. По доставке и состоянию товара все хорошо. Магазин иногда может быть удобен, например, если не хочется ждать доставки 2 месяца из Китая.
Хороший магазин. Доставка по Москве обычно уже на следующий день (но не в майские праздники, и думаю под новый год то же самое). Есть интересный канал не YouTube. Цены на удивление разумные (не хлам с AliExpress с наценкой 2-3 конца, как у других магазинов). В общем, для меня это сейчас основной магазин.
окрестности посмотреть, максимум на 3 км
Вопрос, если позволите.
Это радиус или длина маршрута? Какие антенны используете? Просто насколько я знаю в чистом поле с обычной ненаправленной антенной на частоте 2.4 ГГц больше чем на 1 км передать сигнал проблематично.
У меня цифропицалка (как на фото), близко расположенная к компасо-ЖПСу вообще армиться не давала…
На счет помех верно подмечено.
Меня если честно разве что компас немного беспокоит. Остальное не сильно чувствительно к помехам (легко проверить - кладем Raspberry Pi радом с телефоном и смотрим работает или нет). GSM, Bluetooth, GPS и Wi-Fi (особенно Wi-Fi, ибо 2.4 GHz) я на телефоне разумеется отключу.
После праздников расскажу, что из всего этого вышло.
PS. Кстати fun fact про Wi-Fi. У меня дома если рядом с ноутбуком включить аппу на ноутбуке пропадает интернет 😃 Точнее все начинает ОЧЕНЬ медленно грузиться. Так что касаемо передатчика и приемника угроза совершенно нешуточная.
Можно ли летать с мотором, у которого отлетела (и не была найдена) клипса? Если нет, то по каким словам искать замену на ali express?
Я в общем решил пока не покупать камеру, так поснимаю 😁
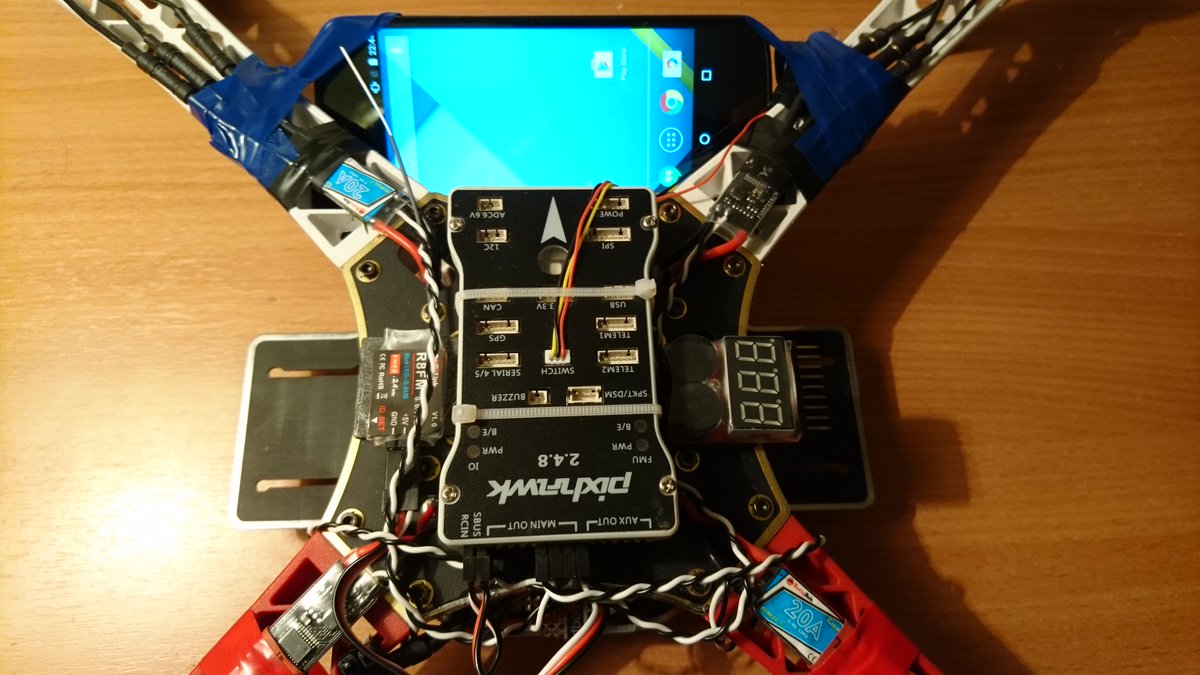
Телефон старый, случись что - не жалко. Шутки шутками, а подошел просто идеально - угол, все порты-кнопки доступны, и тд. Жду выходных.
Кстати, еще можно трекать GPS. Или написать какую-нибудь кастомную апликуху которая шлет тебе SMS с координатами квадрокоптера в случае аварии например. В общем, богатая идея, как мне кажется.
AB7456 - продвинутый клон, лучше оригинала,
Где бы найти такое чудо? 😃 Про него даже ali express не знает.
Fixed 😉
Ну и так теряется все удовольствие от самостоятельного подбора деталей.
Как человек, чей первый квадрокоптер в итоге не полетел, крайне не рекомендую такое удовольствие. Вот когда получите первую реально летающую конфигурацию, там уже развлекайтесь сколько душе угодно. Если есть 300$ хотя бы, проверенную конфигурацию я вам в соседнем треде предлагал. Существенно дешевле - только очень сомнительные готовые комплекты на Ali ну или Б/У.
Рама f450
Вы выбрали рейсерские моторы, которые не очень подходят для вашей рамы. Это кстати заметно по низкому току, 10 A всего.
Мой совет - если собираете первый квадрокоптер, просто скажите, какой у вас бюджет, и попросите за вас все выбрать.
Почему не рекомендуете APM?
Исключительно из соображений что под него больше не делают прошивок и все самое интересное происходит в его дальнейшем развитии в лице PixHawk. По железу он объективно более интересен. То есть, если у вас уже есть APM, он летает и вы всем довольны, то не вижу проблемы. Но покупать его новый я бы не советовал.
Строю свой первый квадрокоптер, но бюджет сильно ограничен.
Если бюджет ограничен (меньше 300$) как мне кажется вам стоит рассмотреть вариант купить готовый набор на AliExpress (лучше на полетном контроллере PixHawk, не APM). Учтите что не все наборы включают аппу и абсолютно все идут без батареи и зарядного устройства к нему. Учтите это при расчете стоимости.
Если есть 300$ я свой набор недавно тут подробно описывал. Если честно, доверия к наборам на AliExpress у меня не много. В частности есть отзывы, когда людям приходят сгоревшие ESC например. То есть, есть хорошие шансы, что такой набор вообще не полетит. Я бы советовал занять, но купить сразу нормальный набор, ибо скупой платит дважды.
Не оторвутся ли они при первом падении?
Со слов, без фото, не очень понятно что там и как. Вообще нормальная паяка так просто не рвется и скорее вырвет часть дорожек с платы или за что они там держатся у моторов. Если прямо за обмотку, не слишком надежно они могут держаться by design. Так при аварии они оторвуться, моторы остановятся. Припаяете потом на место и все ОК. Иначе - см выше.
Интересует возможность использования родного дисплея и как работают ручки управления.
Дисплей какой-то замороченный. Лучше выбрать что-то похожее на стандартный 1602 / 2004 / … или от Nokia 5110, с ними всегда понятно как работать. С ручками проще - там всегда стандартные потенциометры и тумблеры.
Использую вот такой BEC:
В описании не сказано, что это за стабилизаторы напряжения. Посмотрите, пожалуйста, под лупой, что за маркировка? Или сделайте фото, если не трудно. На вид разводка какая-то больно уж простенькая, подозрительно. Не удивлюсь, если спаяли как попало, не по даташиту.
На вид это пара LM7805, которые совершенно не подходят для квадрокоптеров. Я тут паял такой, он греется просто адово, до ожогов.
Подскажите, что лучше
Это все что-то очень странное и подозрительно напоминает вашу текущую. У меня сейчас плата на базе чипа MP1584, проблем не выявлено. Их полно на AliExpress, вот например самая простая. К наличию в описании “super LM2596” я бы отнесся с подозрением и перепроверил, что в плате LM2596 на самом деле не используется, что это просто поисковая оптимизация.
тогда и пропы до кучи киньте)))
Сейчас летаю на HQProp MR1045, отличные пропеллеры. Скопирую сюда мой отзыв:
Не нужно балансировать, все полетит и так. Довольно прочные, к моему удивлению переживали втыкание в землю, кошение сухой травы и другие издевательства. Даже когда от пропеллера откололся кусок, оказалось, что с ни можно дальше летать.
Меня тут перенаправили из соседнего треда 😃
Выбираю камеру, на первое время просто записывать фото-видео, но с возможностью дальнейшего апгрейда до FPV+OSD. Нравится Mobius ActionCam 1080p HD. Нормальный вариант?
Хочу поснимать на SD карту от первого лица, с возможностью дальнейшей прокачки в сторону FPV + OSD. Верно ли мое понимание, что подойдет любая hdmi камера (gopro, mobius action cam, …) к которой потом при помощи mini hdmi to av можно прикрутить остальное? В целом норм такое решение? Если не норм, то что посоветуете вместо?
Кстати, если экономить, я бы лучше собрал такой же комплект по отдельности без 433mhz telemetry, PPM Encoder и I2C splitter. Нафиг они вам нужны?
Скажите пожалуйста, есть ли какие плюсы или минусы этих рам по отношению друг к другу?
Летаю на F450. Отличная рама, на удивление прочная. Пережила штук пять аварий уже, правда не слишком больших. По отзывам можно налететь на плохие версии сделанные из непонятно чего. На air-hobby.ru брал, у них хорошая версия. Из плюсов - очень распространена, влезает в обычный пакет, цена. Еще ее можно целиком распечатать на 3D-принтере, если есть, в интернете есть несколько моделей. Плюс к ним улучшения - протекторы винтов, и подобные вещи.
За X500 не могу сказать. Но могу с уверенностью сказать что мне лично все что больше 450 мм неудобно. На столе перед ноутбуком места уже не хватает, перевозить не очень понятно, как (если ты не автолюбитель), и так далее.
В общем, F450 вполне нормальный вариант.
2.4.8 это действительно урезанная версия? Чем она отличается?
По описанию, отзывам и фото трудно сказать, в чем различия.
PIX 2.4.8 is DIY simplified version, if you need stardard verison PIX 2.4.7 , please buy at here
Я читаю это примерно так “мы тут у себя в Китае спаяли почти такой же PixHawk”. Там могут быть незначительные отличия - другие стабилизаторы напряжения, другие диоды, чуть иная разводка, и так далее. Ну и по опыту приобретения китайской электроники спаяна она может быть как попало - компоненты кривенько зачастую стоят, на youtube описаны случаи когда каплей припоя тупо короткое замыкание делали (классика от bigclivedotcom: The cheap shitty pink USB charger from China).
Может оказаться, что все ОК. Если деньги позволяют, я бы не рисковал.
www.youtube.com/watch?v=wZSfcD3hiRQ
Так примерно выглядели мои первые полеты. Если вдруг кому-то интересно, чем дело закончилось 😃
Очень чувствительный throttle. Чуть вниз и ползает по земле. Чуть прибавляешь и улетает ввысь. На этом видео я его в начале подбираю и потом вообще не трогаю. При движении вперед-назад коптер естественно слегка опускается.
Не обошлось и без нескольких аварий. Пару пропеллеров я потерял, но остальные компоненты все целы. Никого не убил и не покалечил 😃
Вести с полей - эта штука летает 😃 Всем большое спасибо за помощь!
Управлять пока получается не очень хорошо. Отчасти из-за ветра, отчасти из-за своей криворукости ) Летать пытаюсь в паре метрах над землей. Как что-то идет не так, сажаю. В общем, учусь…
И что-то реги какие то мелкие.
Я так понимаю, модель такая, на то чтобы прятать в лучи рамы видимо рассчитаны. Sunrise Cicada 20A, вроде нормальными оказались. Только у них BEC не выведен, пришлось отдельную платку использовать.
А чем обусловлено поперечное расположение центральной части?
Так исторически сложилось 😃 Я наверное все-таки переделаю. Но вообще, какая разница?
Лучше подтянуть лентой-липучкой.
Спасибо, попробую. Но по-моему там вообще не за что подцепиться уже…
Какой то мотор крутиться не в ту сторону.
Вроде все крутятся в нужную, как в этой статье описано.
Обычно располагают вдоль длинной части нижней платы.
Понял, исправлю.
Проверьте порядок подключения моторов на вашей раме.
Точно, косяк. У меня если из левого верхнего угла на фото идти по часовой стрелке моторы подключены к main out в порядке 1, 2, 3, 4. Подключил как показалось логичным и забыл перепроверить. А если верить мануалу порядок должен быть 3, 1, 4, 2.
И еще вопрос. На каких режимах (Stabilize, Attitude Hold, Loiter, …) посоветуете начинающему (и не имеющему пока GPS) 1) взлетать 2) садиться 3) летать между 1 и 2? Является ли плохой идеей просто всегда использовать дэфолтный Stabilize?
А и еще вопрос - на такой раме батарея фиксируется чем-то кроме самой рамы? Она довольно плотно прижата между верхней и нижней ее частями, и я плохо представляю чем ее дополнительно укрепить. Как по вашему, нужно ли и если да, то чем?