Activity
Всем привет. Если кому то нужно, отвечу на вопросы по сервису.
Работу проделали очень большую и уникальную. На сегодняшний день, проще чем у нас, в России летать невозможно 😉
Что-то мне кажется это не с прошивкой дело, а в железе. Ну да фиг бы с ним, ведь дрон при этой ошибке нормально себя вёл, никуда не пытался свалить, висел и не двигался.
Все верно. С компасом такая штука: магнитное поле у земли и на высоте может быть разное - все зависит от местности очень.
Например, рядом с моим домом (домами жилого комплекса), дрон начинает сносить вбок при полете, может и ошибка компаса вылезти. Если откалибровать тут, то он будет нормально летать рядом, но стоит отлететь подальше, компасу не нравятся такие перемены.
От прошивки точно ничего не зависит. Дрон летит и тут внезапно получает изменившееся магнитное поле. Получив разногласия, вылезает ошибка компаса. А на низкой высоте, работает VPS, поэтому его и не уводит никуда.
Flight list: и бесконечное вращение
И не более, чего то не хватает, может надо ещё что загрузить (установить)
Залил версию 1.8 на google play, исправлена проблема на старых андроидах.
Flight list: и бесконечное вращение
И не более, чего то не хватает, может надо ещё что загрузить (установить)
Ой, у вас же 4 андроид… На днях будет под него исправление.
Я не ругаю программу. Я думаю, что правильно прекращать миссию при потере связи. Батарея сядет, связи нет, домой не возвращается, продолжает миссию до упаду. Сдуру человек может нарисовать миссию на 2 км пути - не в спорт режиме он ее не выполнит. Конец миссии НЕОЖИДАННО может быть в точке, где нет связи, человек указал дрону “зависнуть” в конце - что тогда? Ну по ошибке… Бегать потом искать точку, где связь есть?
Вы кажется не совсем поняли. Моя программа не “летает”, она лишь составляет маршрут для DJI Go mod. А продолжать маршрут при пропаже связи, это стандартная логика для ВСЕХ дронов DJI. И это поведение логичное. Пользователь может поставить последней точкой дом или включить в настройках возврат домой по завершении миссии.
Сдуру человек может просто впечататься на полной скорости в спорт режиме. И еще много способов выстрелить себе в ногу.
Все ошибки на операторе, есличто. Кроме одной: при пропадании спутников в зоне отсутствия связи миссия прервется и не возобновится: на запуск миссии нужна команда с пульта. И домой дрон не вернется - миссия не закончена.
Специально тестил в месте, где стабильно появляется ошибка компаса. Дрон останавливается, его сносит, но потом когда ошибка пропадает, он снова возвращается к заданию. Думаю с пропажей GPS тоже такая же логика будет.
Смысл в том, что при пропадании спутников, видя изображение можно погонять его выше/ниже. Пока одумается, если не жёсткий улёт конечно. А так… Миссия невыполнима - пропал и всё. Не… Я как-то очкую:)
Ну так сразу и скажите что просто очкуете ) Есть люди, которые вообще дальше 50-100 метров от себя не летают, мало ли что.
Сдуру человек может нарисовать миссию на 2 км пути - не в спорт режиме он ее не выполнит.
У меня выполняет спокойно миссии на 5 км, если без ветра. Если с вертром, лучше оставить запас метров в 500.
2 км спарк спокойно пролетает не в спорт режиме + 2 км возврат домой (10 м/c)
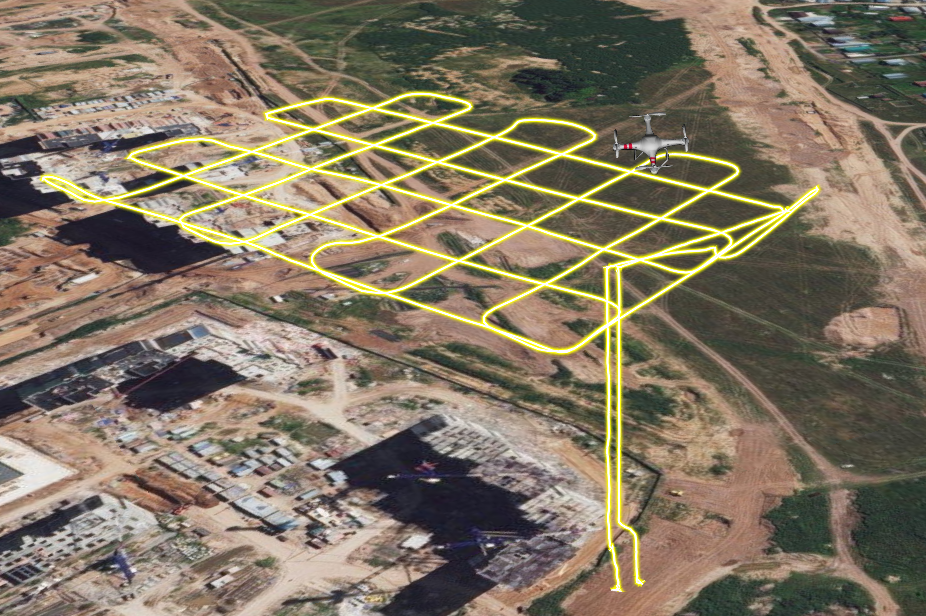
Вот на такое потребовалось 4.7 км, пролетел без проблем skfb.ly/6zvEO
В своей программе, кстати, в последней версии сделал разбивку длинных миссий на части. Можно сделать миссию (например сетку) хоть на 50 км, программа разобъет ее на части. Дрон будет сам прилетать домой за новой батарейкой, а потом лететь дальше продолжать съемку. На днях буду снимать (коммерческий заказ) - миссия на 35 км.
Простите за вопрос от чайника…
Взлетаете на какой программе? Это зелёный мод, красный или ещё какой? Или официал?
Летаете потом в DJI GO mod. Красный, за остальные ручаться не могу, так как это непонятного происхождения сборки, и неизвестно, включили ли туда нужные патчи.
Это неправильно… В корне. В случает неадекватной ситуации дрон не вернётся. Не приложение решает вернуть дрон или нет (ведь связи нет). Дрон при потере связи с пультом САМ через 20 секунд решает лететь в точку взлета. Протестируйте ещё раз. Начните миссию и выключите пульт - должен вернутся, в другое не верю. Это железная фича, не программная. Скорее всего была потеря видеолиньк, а пульт был подключен - светодиод зелёный.
Вот именно дрон решает. У него есть миссия, он ее выполняет. Вы сами то пробовали миссии? Даже надпись появляется что в случае потери связи, дрон продолжит миссию.
Повторюсь: waypoint миссия загружается в дрон, а не подаются сигналы с пульта во время полета.
Вы сами не пробовали летать по миссиям? А я делаю это часто, в том числе это нужно было делать при тестировании при написании моей программы. Как будут лишние свободные руки, запишу видео как даю команду на старт миссии, выключаю пульт и дрон спокойно отрабатывает миссию.
Какая неадекватная ситуация может произойти? Сбой GPS или компаса? Тогда какая разница, будет он продолжать миссию или полетит домой, если все равно он не сможет нормально полететь.
Есть где почитать что и как с первого раза в лоб не решилась(
Андройд 4.4
Sony Xperia z3 tablet compact
А что конкретно не получается?
При обрыве связи с управляющим устройством - всегда RTH. Поэтому при выполнении миссии он всегда должен быть на связи. При обрыве - полетит домой, при чём по прямой от точки обыва, т.е. если вы снимали миссией огромное дерево и он залетел за дерево с потерей связи, то он полетить по RHT прямо в дерево.
Нет. Вчера этот момент тестил - дрон летит спокойно по маршруту. Приложение ругается что нет связи, предлагает вернуть домой, естественно не соглашаешься, так как при появления связи, оно и направит домой.
Вот пример - половину маршрута за домом и сигнала не было.
можно смело делат миксы прошивок как и для про (жаль тока нет прошивки без nfz)
Чуть чуть подождите. Уже есть dji go mod с патчем отключающим NFZ без модификации прошивки. Хотя кое какие манипуляции делать нужно: прошивка остается оригинальное, у нее обнулсяется база nzf, а dji go mod просто не спрашивает и не обновляет эту базу.
Большое спасибо! очень интересная идея, можно подробно описать как работает данная программа,
Не нашел настройку того что делается по завершению миссии
Кроме того каким образом найти потом точки в DJI Go
Можно пожалуйста шаг за шагом спасибо
Создаете миссии в моей программе. Там все просто, особых проблем возникнуть не должно. Можете спокойно создавать, редактировать или удалять.
Далее взлетаете, открываете waypoint mission, сохраненные миссии и нажимаете на нужную из списка. Справа сверху значек шестеренки, это настройка. Все, стартуем миссию. Можем выбрать скорость (до 10 м/с, но ребята которые делают dji go mod, в скором времени обещали поднять до 15).
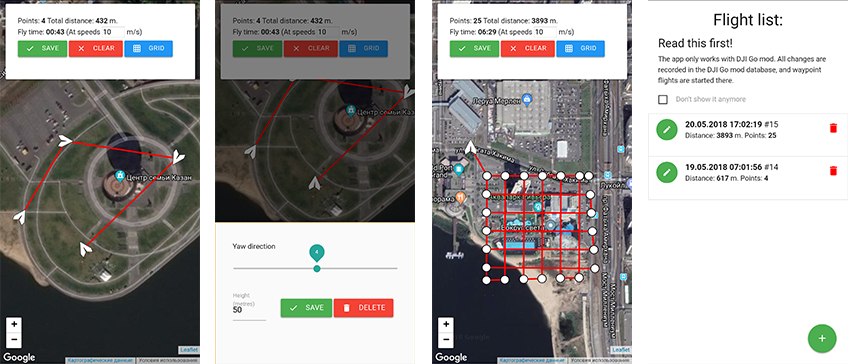
По поводу waypoint миссий на спарке. Есть решение )
В DJI go mod доступны миссий для спарка, но там нельзя их составлять офлайн - только повторять записанные в полете.
Сделал программку, которая позволяет заранее строить маршруты. Они записываются в базу данных dji go mod, как будто бы дрон уже по ним летал.
Для каждой точки можно задать высоту и направление коптера. Поддерживается автоматическое создание сеток для 3д и 2д аэросъемки местности. А так же есть автоматическая разбивка длинных маршрутов на несколько более мелких.
Сама миссия уже загружается в dji go mod, там же есть несколько полезных настроек: что делать после завершения (домой или зависнуть на месте) и направление коптера (как в миссии, согласно направлению маршрута или свободный режим).
Бесплатно и без рекламы: play.google.com/store/apps/details?id=ru.zalomskij…
Кстати, появилось какое-то периодическое “желе” на видео…эдакие нечастые моменты как бы легкой потери резкости.
Но запускался в сумерках - может это недостаток света так повлиял.
Хотя раньше не наблюдал - может это новые Джиги так работают - не летал несколько месяцев.
Когда недостаток освещения, камера увеличивает выдержку. И если появляются небольшие вибрации подвеса (а они есть, давятся программным стабом), вылезают такие артефакты.
На большой высоте движения на видео, будь то 20 км/ч или 50 км/ч выглядят не очень то эффектно.
Поймите одно - никакие скорости и характеристики, особо не добавят красоты в видео. Тут главное уметь снимать. Как то снимают красиво автогонки, где дрон ну никак не угонится за машиной.
Кстати, одного не понимаю - во всех обзорах говорят что в спорт режиме камера не опускается. У меня она нормально опускается, стабилизация работает, но хуже конечно же. Но если приноровиться, снять можно.
Класс! Спасибо. Не так плавно, как на видео, притормаживает, но идея супер!
3d-log.com/yydcf6Было бы здорово, если бы был выбор моделей коптеров)
Тормоза зависят уже от компьютера или смартфона ) у меня все плавно.
А вот модели разные добавить могу, только вот где их взять…
Для тех, кому лень проходить по ссылке, вот видео как оно выглядит:
гугл карты умеют)
Умеют делать 3D визуализацию полетов коптеров от dji? Да ладно?! ))
Покажите мне пожалуйста, как там можно сделать вот так 3d-log.com/28mzjx (да еще и камерой повращать и пр)
Было пару свободных вечером и сделал одну интересную штуку.
3D визуализация полетов на коптерах DJI. Все что нужно, это загрузить лог полета (.txt) на сайт смотреть, как это было на интерактивной 3D карте. Бесплатно и без ограничений 😉
3d-log.com
Протестируйте пожалуйста, выкладывайте ссылочки на ваши полеты 😉

Не знаю как у вас, но я спокойно отменил посадку.
Может быть у меня было какое то стечение обстоятельств или какой нибудь глюк, не знаю, но отменить посадку не смог ни одним из способов. В том числе пробовал и возврат домой и просто поднять (при этом он должен был по идее просто остановить спуск, но не подниматься). Иначе мне просто не прислали бы новый дрон. По логам собственно и видны мои попытки.
Пользователь может и должен иметь возможность отмены посадки, в т.ч. принудительной, если это не связано с критическим разрядом батареи
А вот с батареей, кстати, идеально было бы дать выбор - убить батарею либо убить дрон целиком. Сколько было случаев что из за глупости пилота, дрон садился, например, на воду, хотя заряда хватило бы вырулить до земли, пусть ценой батарейки. Если боятся того что аккумулятор потеряет свои свойста из за низкого разряда, пусть помечают его как не пригодный.
Подвержу и я - туман спарку противопоказан.
Я так собственно свои и потерял.
Залетаю на 120 метрах в туман, он пищит что он низко над землёй. И тут я сделал глупость - начал снижаться и это в Р режиме. Он это воспринял как команду садиться.
Запомните, в случае глюка сенсора, переключайтесь в спорт режим либо никогда не жмите “газ” вниз до упора - это команда на посадку.
Ок, начал садиться в 300 метрах от меня, и вдруг оказывается что отменить посадку нельзя. Никак.
Дрон снизился до 70 метров и пропала связь. Сел он в глухом лесу, дойти до которого можно через болота. 5 дней поисков ни к чему не привели. Как исправился. Даже с металлоискателем искали.
Пару недель переписывался с техподдержкой dji. Они меня уверяли что я виноват - не нужно было летать в туман, а я им доказывал что это не является причиной аварии - причина в том что посадку нет возможности отменить. Но внезапно, через пару недель мне пришел от них новый Спарк.
Сейчас проект забросил по причине приобретения DJI Spark
Аналогично. Купил спарк и больше нет проблем. Выскажусь подробней по этому поводу, что не так с хубсаном:
- Коллекторные двигатели, причем очень ломучие. Сначала бил рекорды на дальность и прочие интересные полеты, но потом после отказа двигателя в полете стал бояться на нем летать ( Причем отказавший двигатель унес собой еще 3 винта, еще один двигатель, две каретки и корпус.
- Лотерея с калибровкой компаса. Вот реально, никогда не знаешь, правильно ты его откалибровал или что то пошло не так. Иногда через несколько минут полета, его начинало унитазить, на изрядном удалении. Кое как возвращал домой. Причем в altitude mode нужно постоянно следить за высотой, так как, внезапно, он не умеет в этом режиме ее держать.
- Камера. Она ужасна. Ладно, понимаю что никакой стабилизации нет, но качество картинки это тоже лотерея. Свою камеру то я кое как подкрутил, но качество картинки все равно хуже, чем в более дешевых квадриках. А еще дрон очень уж легкий, его колбасит даже в безветренную погоду, никакая программная стабилизация потом не помогает. Вот ускоренное видео полета по прямой в штиль
Не, если летать в стиле “я отлетаю на 100 метров от дачи, а теперь включаю возврат домой”, все нормально, но это быстро становится скучно. В итоге ни туда ни сюда - ни нормального драйва FPV полетов, ни нормальных съемок. Я не призываю брать как я Спарк, все же ценовая категория совсем другая. У меня просто была такая цепочка: так возьму как я Hubson h501pro, там БК двигатели да и порезвее будет, а цена не намного дороже. Потом: ой, а не плохо было бы камеру повращать вверх вниз, а там уже и стабилизация. И так потихоньку пришел к Спарку. Хотя есть много промежуточных интересных вариантов.
Дождался наконец то низкой облачности, все хотел полетать в облаках. Правда в них ничерта не видно )
Высота 250 метров, удаление 600.
Кто там говорил, что максимальная дальность у h502s - 750 метров?
Вчера поехал в поле проверить и улетел на 1 километр. Пульт без модификаций!
Время полета в одну сторону в штиль около 4 минут. Можно было улететь и немного дальше, но боялся что не хватит аккумулятора на возвращение. Квадрик оставался управляемым, видео сильно рябило. Летел в GPS mode, при развороте обратно, видеолинк пропал и вернулся примерно на 500 метрах.

Вот видео полета, ускоренное в 13 раз. Там подъем на высоту 250 и два полета по километру.
Проверил потом по координатам на пульте, все сошлось.

Кто нибудь знает, есть ли способ снять ограничение в 250 метров по высоте?
И еще вопрос: в altitude mode, почему то он не хочет лететь стабильно, на полном газу теряет высоту.