Activity
От DS188 подойдут?
Первая фаза в прошивке это переход МК ( stm32f411) в DFU режим. Добиваются подачей питания на МК при нажатой кнопке BOOT.
Нужно обратить внимание, чтоб до санкционированной вами подаче питания не питался от других неявных источников. Всякие там приемники, маяки, сервы, видеомодули.
Вторая фаза - убедиться что МК распознался как DFU в операционной системе. Разные линейки МК stm32f с разным успехом распознаются в юсб подсистеме Windows. В Линуксе все стабильно успешно. Под виндой по хорошему нужна была бы установка фирменных ST драйверов. Но чтото пошло не так в консерватории. Лукавый предложил задиг. Мне пришлось переустанавливать винду после того как остальные юсб устройства перестали норм работать. Третья фаза - некоторые МК не прошиввются при подклбченных внешних устройствах: gps, компас, видеомодуль. Приходится отключать, неудобно-с. Другие и так шьются
установил ли гироскоп на вакантное место?
Скорее всего ПК в DFU режим переходит, но софт прошивки в конфигураторе его не видят. Для того и ставят всякие Загибы. Раньше ставил, прошивал теперь не буду.
Но есть и благая весть. Прошить в дфу можно таким софтом как CubeProgrammer или DfuDemo от ST. Для второй нужно предварительно конвертировать файл прошивки в файл . dfu
Возможно для просто F405 запустится, но в полном или частичном объект работать не будет. У ТЕ немного другие чипы сенсоров и в 4.1 для них ещё нет драйверов. Нужно их портировать из младших версий, добавлять новый таргет, собирать.
Это я так думаю. Но конкретно для 405TE в V4.1 не пробовал
github.com/iNavFlight/inav/releases?page=2
Поскребитесь ниже, найдите INAV 4.1 “Raging Sparrow” далее раскройте список Assets> и найдите свою железу.
Скачайте паршивку отдельно, и прошейте любым любимым рабочим способом, загрузив ее локально
Консоль делается просто - подключаете через UART TTL-USB адаптер и выводите нужную информацию.
В STM32 небольшие куски кода можно запускать а RAM, без перезапись флеша.
В среде разработки Keil симулятор имеется. Даже позволяет получать на встроенную виртуальную консоль то что в UART выдаете
Павел, а меня удивляет выбор C#, а не просто C. Можно и написать на асм е, никто не держит. ))) Большую часть кода 4К, пожалуй съела функция printf вывода на консоль. Само вычисление тангенса меньше. Изучайте файл файл map, там много интересного о распределении памяти. Закажите stm32L МК. Почти такой же как Ваш, но с плюшками пониженного потребления. Скачайте IDE SeggerEmbeddedStudio for ARM. Очень интересная среда, поддержка разных МК. Нужно подгружать доп пакеты по нужным МК.
А почему сразу на “враждебном”? Они Вас уже покусали? Столовые приборы для Вас тоже враждебные? А ведь могут вавку на пальчике сделать? Если есть потребность получать инфу как коллегам - вон сколько вариантов и возможностей накидали. Поводы пусть ищут другие.
А по сути - наше хобби насяльниками не приветствуется. И с организацией полётов напряженка.
Собрать прошивку можно, если предоставите файлы из папки target для Вашей платы. И если этот МК поддерживаются инав ом
Кроме того нужно знать какие применяются сенсоры и пр периферия на данной плате, дабы была поддержка драйверами
А передасчик ея какой совать?
Когда читал вики про настройку на ardupilot VTOL там были мысли как и какой мотор может быть причастен к управлению по YAW ardupilot.org/plane/…/quadplane-vtol-tuning.html
Раздел Yaw tuning. Параметры наверное называются немного по другому, ведь в статье речь про QuadPlane
Очень похож на фиксатор герметик для приклеивания зеркал в тубах-шприцах. Была тема про ремонт петель элеронов. Там как раз прозвучало такое название. Для петель он совсем не годится, нужен силикон. А вот что либо зафиксировать - отлично. Цвет - бежевый.
короче, проще взять дешевый полетный контроллер и к нему подключить дисплей и радиомодуль?
В галантерейных магазинах есть резиновые жгутики в текстильной оплетке. Диаметры разные 2-3-4мм. Оплетка сокращает риски истирания резиновых нитей.
Вопрос скорее всего был - на каие контактные площадки выводится тот или иной порт?
“болтанка” в показаниях сесоров, необходимость более сильной их фильтрации а значит загрубления и инертности в реакциях на турбуленции… Может быть и что о другое
По силовой части “гуляют” токи по 20-50А, в т.ч. и импульсные. Не смущает?
Вот на Рыцыгрупс нашел Не знаю можно ли на мини сделать. Теоретически можно, надо отследить аналоги ISP штырьков, плюс нужен UART адаптер подключать. На нанэ это проще делается. Еще не помню нужно ли заливать прошивку asp программатором с полной очисткой либо допустимо с помощью имеющегося bootloader a
И собирать скетч в ардуно иде НЕ нужно, по ссылке в теме прилагается не скетч, а hex файл
Софт для прошивки , брал на сайте FrSky
Есть особенность сначала подключить программатор, выбрать COM порт евойный, а потом уже подключать приемник к STK посредством подготовленного и удобного кабеля, одним втыком.
Ээээ, а frsky приемники шьются или STL (смарт порт адаптер) либо через пульт выходом смартпорта, либо самодельный адаптер из ардуино нано, для того же смарт порта. Схема переделки и прошивка в инете есть. Компилировать не надо
Я не разбираюсь в сортах ACCESS, но мне кажется, что ACCESS приемники прошить ACCST прошивкойй - не? Поправьте, если не так?
Пробовал ли кто разделять 2х платные контроллеры посредством соединения шлейфом? Зачем? Нижняя часть - PDB размещается поблизости у батареи, ESC, верхняя, с датчиками - на удалении. СтОят ли свечки выделки? Как никак меньше наводок от сильных токов.
Тоже вариант
Вот фото реальных вещей:
принципы у велосипеда и бентли, пожалуй одни и те же - колеса, да?
В большом проекте очень, очень много участков которые нужно будет выключить(закоментировать). Причем, не просто безусловно, а в зависимости от каких-то обстоятельств. Мозг взорвется, если все “не нужные” участки вручную “комментировать”. А если это отключение нужно откатить взад? Уже соображать не останется чем ((((
Вы пробовали? Обычно для таких целей используются директивы условной компиляции типа
#ifdef ключ
#endif
а не камменты
Вопрос к тем кто занимался самосборкой прошивки. Можно ли исключить часть кода для коптера или самолета?
Есть ли ключ для этого? Я пока не нашел. Есть куча ключей, например для поддержки тех или иных протоколов приемников,NMEA… А так чтоб чтоб исключить код логики работы целого класса летаблей?
С фотками - странности. Сразу после создания сообщения на ПК у МЕНЯ они тоже не отображались. На утро, со смарта показываются. Вечером сделаю реальное фото FC F405 TE с приложенным XT-60
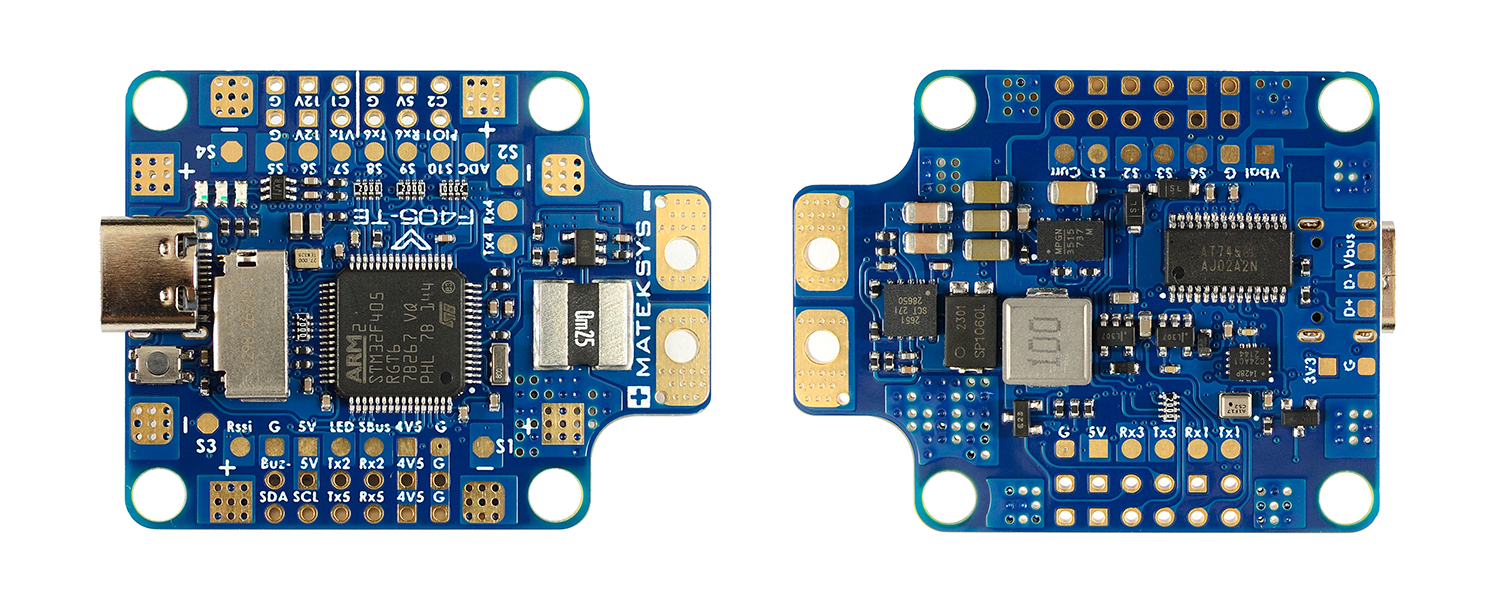
Приобрел MATEK F405 TE, типа наследничка F405 CTR. В качестве аксель-гиро, баро конечно другие чипы. Еще не проверял, но ничего такого из рядов вон выходящего нет. Немного смущает недостаточность диаметра отверстий под разъемчик XT60. посмотрите сами - они около 2.5мм Как монтировать разъем? Рассверливать отверстие? Грубо. Припаивать на коротких отрезках проводов - лишняя пайка она и в Африке лишняя.
Никак не получу MATEK F405-VTOL. Интересно б замутить самолетку классической схемы, но с поворотными ходовыми движками. Такскать должен совмещать преимущества разных летаблей - Вертикальные взлет-посадка, зависание от - коптера. экономичность хода, ветропробиваемость, скорость - от самолета.
Собственно можно применить практически любой WTE FC, но у этого F405-VTOL чуть проще разводить силовую часть, PDP в наличии как для квадрика и самолета.
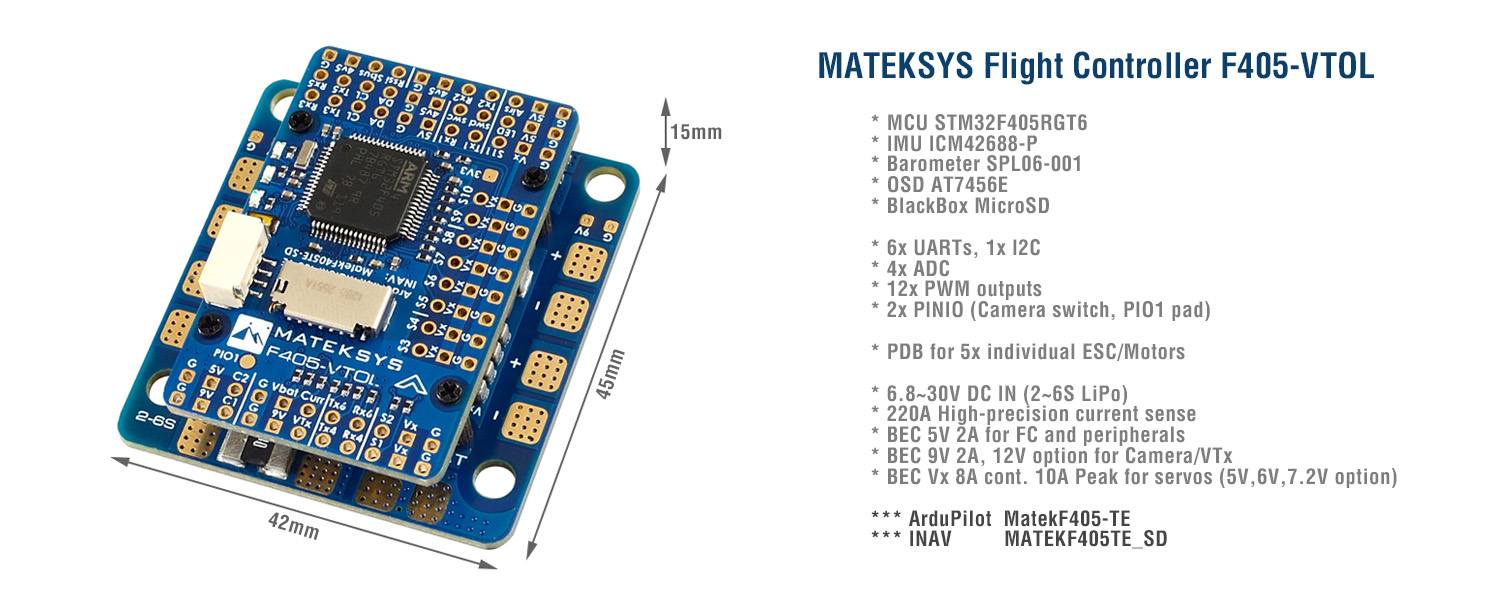
Интересно будет ли у iNav поддержка VTOL? А с доставкой именно этих плат ерунда какая-то. Первый раз плату заказал в конце октября, с получением в 5Post. прошла у нас торможню - и пропала. Ни там-дилер, ни доставщик не признаются у кого. Обращался, искал. ((( Подумав, что 3 месяца ждать - пусть враги ждут, заказал второй раз. 10 дней без движения лежала ПЕРЕД отправкой, только вчера “кобель вскочил”, медитирую на “мягкое” прохождение всех узкиз мест.
У BF прошивки организованы по другому: А. Есть базовая прошивка (unified) для семейства примененного МК плюс Б. Файл конфигурации, который мы накатываем в CLI. BF в CLI настраивается в более широких пределах, чем iNav. Мой клон F405 ДО конфигурации и под “специфичной” iNav вообще только на ком строку отзывался, после стал почти в полном объеме
Под воздействием каких сил меняется шаг лопастей? Вроде бы из одной матрицы, да?
Не буду пророком, если предположу что куча народа ждет истории о правилах подбора Kv, мощности, диаметра, шага, числа лопастей. Я вот в предвкушении своего эксперимента по замене 3х7" на 6х5". Чиста с целью снижения оборотов и шума.
Я в одной настроке для планера умудряюсь без полетных режимов обделать В данной теме ТС не заявлял что собирается использовать витиеватые настройки. 😎.
Сергей, если огранчиться просто тупым ответом на вопрос в заговке темы, то скажу установите в отсек вч турниги ВЧ Multi Module 4in1 У него множество поддерживаемых протоколов, на ваш приемник найдется.
Для достоверности могу проверить в воскр. такой вариант у себя Но товарищи правильно уточняют, что целесообразней подять стоковую аппаратуру до рабочего состояния.
Она проще по устройству и пожалуй обладаен меньшей задержкой., что критично для вертолета
Замена материнки турниги ничего не даст .
cmake - собственно делает Makefile из множества CMakeLists.txt Предварительно создаете папку сборки, напр buildб перемещаетесь в нее и запускаете cmake … Именно с 2 точками, что отсылает cmake на корневую папку проекта и соотв CMakeLists.txt В пред сообщении движок форума понавставлял лишних символов, которые я не смог удалить даже последущим редактированием сообщения. После успешного выполнения cmake в текущей папке сборке генерируется Makefile После чего запускаете make с указанием нужного target. Коза заржала и побежала… )))
cmake еще делает проверки наличия или отсутствия нужных ПО для сборки. Поройтесь по CmakeLists.txt и найдите где выполняется проверка наличия и версии кросскомпилятора. Можно и прямо в тексте подправить версию требуемого компилятора до 10.3.
Однако в документации упоминается, что можно отключить проверку версии компилятора в строке запуска cmake.
надеюсь понимаете что некоторые проблемы со сборкой под Win от того что разные компоненты в разных оболочках (командных, со своими настройками путей) и не могут найти остальные инструменты для сборки. Установка VS - лишнее. Попробуйте освоить сборку под Docker. Эта штука подтягивает нужные образы, которые уже содержат нужные пакеты (ПО) для сборки и настройки. Под убунту сборка через Docker запускается при помощи ./build.sh <TARGET>
Читайте параллельную статейку про более нативную сборку под Linux
Можно начать раздела “Using cmake”
*cd inav
# first time only, create the build directory
mkdir build
cd build
cmake …
# note the “…”, this is required as it tells cmake where to find its ruleset *
В более поздних версиях (c 2.6) сборка делается посредством cmake. Их есть у Вас?
Сначала запуск cmake …
Потом уже выполняете make:
# Build the MATEKF405 firmware make MATEKF405
Есть еще засада с тем, что target NAZE (а именно МК STM32F1xx) не поддерживается начиная с версии 1.73 Меня этот факт тоже много огорчает, придется мастырить, вкрячивать поддержку F1 в одну из более поздних версий. С какой? Несколькими сообщениями ранее я задавал этот вопрос - поддержка waypoints Антон ответил, что с V 1.2, но я позволю усомниться. Даже в V1.73 КМК ее нет. В CLI команда wp не выполняется.
Подписался на тему, ибо тоже “счастливый” F411WTE. Темой трикоптеров тоже зело заинтересовался.
Кроме того в порядке экспериментов ОЧЕНЬ интересует как установить на этот ПК betaflight 4.3? (BTF) Как я недавно понял у BTF есть базовая (unified) прошивка на целое семейство МК, (STMF411) а далее в CLI накатывается (применяется) конфигурационный файл. И если до накатки патчей может не работать почти вся периферия, то после конфигурации она “чудесным” образом запускается.
Вот и выскажу хотелку насчет файла конфигурации для MATEK F411 WTE. Для WSE он есть но не работает, ибо много различий в назначении портов между WSE и WTE. Кроме того нужна поддержка евойного ACC-GYRO чипа.
Кто встречался со случаями успешной работы BTF на MATEK F411 WTE?
Да, виртуалка очень хороший способ. Если комп не старый и памяти достаточно, то замедления работы не вооруженным глазом не видно. Вчера пробовал собирать inav для Mtek F411-WTE V6.0 собралась без “танцев”, но в конфигураторе мультики отображаются с задержкой. Надо разбираться что тормозит. Стоковая прошивка на этих ПК V4.1. Пробовал собирать и ее. Без успеха, какието затычки. Однако в настоящий момент для ветки 4.1 нет таргета MATEKF411TE. Пришлось переключиться на новую ветку и утащить оттуда. Правда не добавлял новый таргет а заменил имеющийся MATEKF411.
То же самое делал для веток 2.6. Собирается, но аксель с гиро не работают. Скорее всего тогда не был реализован драйвер нового акселя.
Ага. И все еще не выяснил, начиная с какой ветки inav waypoints поддерживаются.
Еще. Кто знает как совсем отключать поддержку разных свойств, чтоб не занимало код? В старом baseflight все прозрачно, есть отдельный .h, где все вкл и выкл можно.
В инструкции неправильно указано, что нужно установить просто gcc. Это набор для сборки программ для инструментального компьютера. Для сборки прошивки для ПК нужен кросс “компилятор” arm-none-eabi-bla-bla Если собрались собирать не пожилые сборки, берите версию 10.3. Для старых версий нужна и версия кросс компилятора пониже (иначе полезут “ошибки”) 10.3
Вот еще про установку кросскомпиляторов habr.com/en/post/673522/
На датчиках Холла и/или магнитах очутилась мет пыль или стружка? Подул - удалил
Похоже конфуз случился из-за того что линия телеметрии от приемника была подключена к выходу!!! TX2 FC, который как раз в режиме выхода работает. ((( Ну, такое несоответствие похоже было причиной сбоев… Сейчас отработка сигналов с приемника происходит вполне плавно.
Однако, продолжаю “опыты” с этим F405. (наверное не чистый клон, а с “особенностями” ) В настоящий момент прошивка iNav 5.1 Не работает акселерометр и гироскоп MPU6000. Под BETAFLIGHT работал. Ожидается, что он подключен к SPI шине.
Какая прошивка используется с этим ПК? Как и чем его настраивать?
Чем наблюдаете битые пакты по sbus от приемника? В статусной строке конфигуратора? Я пока полагаю, что wifi роутер в данном случае не оказывает влияния.
- Другие комплекты на том же столе, другие FC ( F765, F411) с другими приемниками правда эту проблему не имеют
- На даче, где нет роутера, такие же проблемы.
Приемник свеже при bind еный
FC Eachine (bla-bla… короче клон MATEK F405) Приемник FrSky X4RS (не битый, из упаковки) Прошивки были разные: Betaflight 3.5, iNav 5.1 (сейчас) Подключается к конфируратору. На вкладке “приемник” наблюдаются случайные всплески сигнала по разным каналам, если вообще за стики не трогать. Связь с приемником по SBus, телеметрия подключена, но не наблюдается.
Если шевелить стики на пульте - соответствующий каналу сигнал показывается с дрожанием. Еще одна болячка - иногда индикатор связи по USB с компом на конфигураторе - начинает “мигать” - менять цвет.
Что за дела? Почти такой же FC с таким же приемником работает нормально.