двигатели + винты= характеристики (для мультикоптеров и других ла)

В общем покрутим 4008-12 600кв на 35А с прошивкой Simon К и также на простеньких плюшах и химоделях с пропами до 14 дюймов. Большего размера не имею и не планирую применять
Если кому нужен комплект новых моторов тигров 4006-13 на Х6 до 3-3.3 кг полетного веса, то пишем в личку. Договоримся. Возможен вариант на керамических подшипниках. ТТХ моров выше пост #2234
Подскажите пожалуйста по двигателям вообще и по RCTimer DC 2830-14 750KV конкретно.
Правильно ли я понимаю что бы определить какую максимальную тягу может создать двигатель для него нужно найти оптимальное соотношение (v,d) - max v^2*D^4 (v скорость оборотов винта, D диаметр винта) ?
Вот тут flydrones.ru/test-motorov-rc-timer-2830-14-750kv есть табличка тестирования. Поясните пожалуйста как так получается что почти при одинаковом напряжении подаваемом на мотор от ESC (если я правильно понял) ток и потребляемая мощность сильно отличаются ? Эта такая ВАХ мотора ? И почему почти при одинаковом напряжении так сильно отличается тяга ? Спасибо.
Может стоит прочитать в интернете про бесколлекторные моторы? Врятли ктото на форуме прочитает лекцию, если все написано давно. И чтобы не морочится с формулами ищите тему “коптер калькулятор”.
Может стоит прочитать в интернете про бесколлекторные моторы? Врятли ктото на форуме прочитает лекцию, если все написано давно. И чтобы не морочится с формулами ищите тему “коптер калькулятор”.
Искал, читал. Ответов не нашел. Может плохо искал. Если не сложно дайте ссылку.
Калькулятором воспользоваться конечно можно, но я хочу понять как эти цифры получаются.
…Поясните пожалуйста как так получается что почти при одинаковом напряжении подаваемом на мотор от ESC (если я правильно понял) ток и потребляемая мощность сильно отличаются ? Эта такая ВАХ мотора ? И почему почти при одинаковом напряжении так сильно отличается тяга ? Спасибо.
В тестах указывается постоянное напряжение питания на входе регулятора и ток потребления регуляторов. На сам же двигатель с ESC поступает трехфазная импульсная последовательность с амплитудой импульсов, почти равной напряжению питания регулятора и заполнением, определяемым управляющим сигналом на входе регулятора.
В итоге получаемая тяга ВМГ в таблицах при фиксированном напряжении питания регулятора зависит от управляющего сигнала на регуляторе.
Потребляемый регулятором ток позволяет оценить интегральную электрическую мощность, подводимую к двигателю при данной тяге (включая некоторые потери на самом регуляторе).
На сам же двигатель с ESC поступает трехфазная импульсная последовательность с амплитудой импульсов, почти равной напряжению питания регулятора и заполнением, определяемым управляющим сигналом на входе регулятора.
Что есть “заполнение” ?
Расчет характеристик синхронного трехфазного двигателя
с многополюсным ротором на постоянных магнитах
и как это правильно применить, например к мотору BC-3536-11 750KV ? Например: “Диаметр обмоточного провода выбирается … чтобы максимальная плотность тока в проводе не превышала значения, определяемого теплостойкостью изоляции (5 А/мм2 для 100 0C)” А у этого мотора сечение обмотки 0,212 мм2 а max ток (через регуль) 23А (у меня получалось и 40А при 600W на несколько секунд) . Думаю надо учитывать ESC. То есть временной интервал, когда “максимальная плотность тока в проводе” имеет место быть 😃
Что есть “заполнение” ?
В общем случае происходит изменение частоты и скважности питающих импульсов.
нет смысла. на 3S еще как то, но обороты никуды не годятся . Для 4S можно, но опасно. Газ зарезать нужно будет. 14-е и более только для 4008-12 (600кв) или из этой планки на больший вольтаж и меньший кв.
Ну если хочется, то ради бога крутите хоть на 16-х.😉 Никто не запрещает
MT4006-13 отлично крутит 14-15 винты на 3S. Эффективность во всем диапазоне примерно в 1.3-1.4 раза выше, чем на мелких винтах из Вашего теста. Регули - дешевые HK BlueSeries.
Максимальная тяга на APC 14х4.7SF - 1700 грамм, правда при этом превышаются указанные производителем допустимые для этого пропеллера обороты.
В целом мотор понравился, но только для тяжелых аппаратов. На легкие аппараты ставить его нет смысла - весит через чур много.
MT4006-13 отлично крутит 14-15 винты на 3S. Эффективность во всем диапазоне примерно в 1.3-1.4 раза выше, чем на мелких винтах из Вашего теста. Регули - дешевые HK BlueSeries.
Максимальная тяга на APC 14х4.7SF - 1700 грамм, правда при этом превышаются указанные производителем допустимые для этого пропеллера обороты.В целом мотор понравился, но только для тяжелых аппаратов. На легкие аппараты ставить его нет смысла - весит через чур много.
Неужели??? Данные давайте конкретные , а не слова. И покажите как ваш аппарат тяжелый летает на 3S с этими моторами на 14 и 15 пропах. Уж извените, но он захлебывается на 3S и на 11-х и на 12х, посмотрите в таблицу, где момент предела. И приведите его мощность к его массе, вот собственно и все. Законы физики и ГосДума не отменит.😉
После фактов можно будет продолжить спор.
Сегодня получилось у меня на 4005te-13 11.5 г/ватт на тяге квада в 1350 .в ховере.т.е. Но как летает не внушило… На 11х4.7 было лучше.( сегодня стояли 12х3.8)
В общем случае происходит изменение частоты и скважности питающих импульсов.
Спасибо за разъяснения. Но непонятные моменты остались.
Правильно ли я понял, что на каждую из трех фаз двигателя с помощью ШИМ ESC генерирует трапецевидные (почти прямоугольные) импульсы. Скважность этих импульсов задает скорость вращения. Чем меньше скважность тем больше ток в обмотках двигателя, большее сила магнитной индукции и как следствие выше скорость вращения. ?
Ну, вроде бы, вот так n=60f/p где n - частота магнитного поля, f - частота питающего напряжения, р - чисто пар полюсов. ESC и оперирует f
А можно ли зная паспортные данные двигателя (kv, max P) определить (хотя бы примерно) максимальную тягу которую он может развить , те найти max v^2*D^4 (v скорость оборотов винта, D диаметр винта) ?
Правильно ли я понял, что на каждую из трех фаз двигателя с помощью ШИМ ESC генерирует трапецевидные (почти прямоугольные) импульсы. Скважность этих импульсов задает скорость вращения. Чем меньше скважность тем больше ток в обмотках двигателя, большее сила магнитной индукции и как следствие выше скорость вращения. ?
Не совсем так.
На выходе ESC действительно формируются близкие к прямоугольным импульсы (транзисторы работают в ключевом режиме). Скорость вращения двигателя при этом будет определяться частотой следования питающих импульсов с ESC. Но есть интересные нюансы, рассмотрит их подробнее.
Когда конкретный бесколлекторный двигатель будет иметь максимальную эффективность? Ответ очевиден: когда в процентном отношении в механическую энергию будет преобразовываться большая часть подводимой к нему электрической энергии. Далее, рассмотрев устройство и принцип работы бесколлекторного двигателя и не рассматривая пока тепловые потери в проводах обмоток, можно увидеть что степень преобразования двигателем энергии каждого питающего импульса в полезную работу будет определяться не только значением магнитной индукции статорной обмотки, но и скоростью ее достижения с момента поступления питающего импульса на обмотку. Т.е. как быстро магнитный поток достигнет своего максимума. Ведь в идеале каждый питающий импульс по-максимуму, с самого начала и до конца, должен быть “усвоен” и превращен в силу магнитного поля.
Но обмотки статора неидеальны, помимо необходимой индуктивности они имеют и некоторое собственное омическое сопротивление. В итоге мы в общем виде приходим к рассмотрению переходного процесса в RL-цепи, в которой, как известно, происходит задержка нарастания тока в индуктивности. Задержка тем большая, чем больше значение индуктивности и сопротивления.
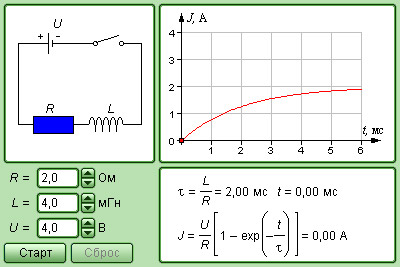
Откинув лишнюю теорию нужно отметить важное обстоятельство: ток в реальной статорной катушке растет с некоторой задержкой во времени относительно момента подачи питающего импульса. Из этого следует важный вывод:
- за время задержки нарастания тока в обмотке магнитный поток не достигает своего максимума. Таким образом часть энергии импульса не используется эффективно. Чем больше длительность задержки по отношению к длительности всего импульса - тем меньше эффективность преобразования энергии. А длительность питающего импульса зависит от частоты вращения двигателя. Поэтому чем выше скорость вращения, тем меньше получается оставшаяся после задержки нарастания тока длительность времени, когда ток в статорной обмотке достигает своего максимума. И тем меньше эффективность преобразования энергии.
Эти теоретические рассуждения теперь объясняют наблюдаемые на практике вещи. Например тот факт, что эффективность каждой отдельной ВМГ непостоянна во всем диапазоне скоростей вращения двигателя (положения газа) и снижается с ростом скорости вращения ротора двигателя.
Также теперь становится понятно почему эффективность большинства двигателей оказывается в какой то момент больше при более низком напряжении питания.
Дело здесь не только и не столько в потерях на сопротивлении обмоток с ростом тока в них. При увеличении напряжения питания регуляторов соответственно увеличивается и напряжение питающих импульсов, поступающих на двигатель. При определенной частоте вращения ротора управляющие импульсы становятся равными вносимой со стороны обмотки задержке, а при дальнейшем росте оборотов питающий импульс становится еще короче, ток в обмотке попросту не успевает достигать своего максимума, возможного для данного напряжения питания. Эффективность падает.
В итоге для каждого конкретного двигателя (с конечными R и L его статорных обмоток) есть конечный энергоэффективный диапазон скоростей вращения с “посильным” ему винтом и при заданном напряжении питания.
Большое Вам спасибо за подробное разъяснение !
Может подскажите и по расчету мощности (пост 2295) ?
Простой стенд для проверки расчетных данных, пробы и принятия решения
rcexplorer.se/projects/…/the-motor-test-stand/ Наглядное руководство для не любищих матанализ
что какая то из последнинких прошивок заставляет моторы плоские икать. И видео было.
Хоть бы кто попробовал газануть на них под нагрузкой и на 4S
Может быть мое видео и было, еще много таких видео на rcgroups в профильной ветке:
3506 + 4s + 20а rctimer прошитый simonk’ом, крайней версией на тот момент. Насколько я знаю, с тех пор у simonk’овской прошивки ничего не изменилось в плане поддержки плоских тайгеров.
Wii-esc в этом плане работает лучше, можно сконфигурить параметры под эти моторы
А кондеры сняты?
за время задержки нарастания тока в обмотке магнитный поток не достигает своего максимума. Таким образом часть энергии импульса не используется эффективно. Чем больше длительность задержки по отношению к длительности всего импульса - тем меньше эффективность преобразования энергии. А длительность питающего импульса зависит от частоты вращения двигателя. Поэтому чем выше скорость вращения, тем меньше получается оставшаяся после задержки нарастания тока длительность времени, когда ток в статорной обмотке достигает своего максимума. И тем меньше эффективность преобразования энергии.
Вот для устранения этого безобразия существуют “тайминги”, а по русски “опережение”.