двигатели + винты= характеристики (для мультикоптеров и других ла)

Ну, вроде бы, вот так n=60f/p где n - частота магнитного поля, f - частота питающего напряжения, р - чисто пар полюсов. ESC и оперирует f
А можно ли зная паспортные данные двигателя (kv, max P) определить (хотя бы примерно) максимальную тягу которую он может развить , те найти max v^2*D^4 (v скорость оборотов винта, D диаметр винта) ?
Правильно ли я понял, что на каждую из трех фаз двигателя с помощью ШИМ ESC генерирует трапецевидные (почти прямоугольные) импульсы. Скважность этих импульсов задает скорость вращения. Чем меньше скважность тем больше ток в обмотках двигателя, большее сила магнитной индукции и как следствие выше скорость вращения. ?
Не совсем так.
На выходе ESC действительно формируются близкие к прямоугольным импульсы (транзисторы работают в ключевом режиме). Скорость вращения двигателя при этом будет определяться частотой следования питающих импульсов с ESC. Но есть интересные нюансы, рассмотрит их подробнее.
Когда конкретный бесколлекторный двигатель будет иметь максимальную эффективность? Ответ очевиден: когда в процентном отношении в механическую энергию будет преобразовываться большая часть подводимой к нему электрической энергии. Далее, рассмотрев устройство и принцип работы бесколлекторного двигателя и не рассматривая пока тепловые потери в проводах обмоток, можно увидеть что степень преобразования двигателем энергии каждого питающего импульса в полезную работу будет определяться не только значением магнитной индукции статорной обмотки, но и скоростью ее достижения с момента поступления питающего импульса на обмотку. Т.е. как быстро магнитный поток достигнет своего максимума. Ведь в идеале каждый питающий импульс по-максимуму, с самого начала и до конца, должен быть “усвоен” и превращен в силу магнитного поля.
Но обмотки статора неидеальны, помимо необходимой индуктивности они имеют и некоторое собственное омическое сопротивление. В итоге мы в общем виде приходим к рассмотрению переходного процесса в RL-цепи, в которой, как известно, происходит задержка нарастания тока в индуктивности. Задержка тем большая, чем больше значение индуктивности и сопротивления.
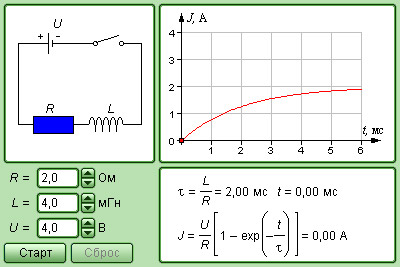
Откинув лишнюю теорию нужно отметить важное обстоятельство: ток в реальной статорной катушке растет с некоторой задержкой во времени относительно момента подачи питающего импульса. Из этого следует важный вывод:
- за время задержки нарастания тока в обмотке магнитный поток не достигает своего максимума. Таким образом часть энергии импульса не используется эффективно. Чем больше длительность задержки по отношению к длительности всего импульса - тем меньше эффективность преобразования энергии. А длительность питающего импульса зависит от частоты вращения двигателя. Поэтому чем выше скорость вращения, тем меньше получается оставшаяся после задержки нарастания тока длительность времени, когда ток в статорной обмотке достигает своего максимума. И тем меньше эффективность преобразования энергии.
Эти теоретические рассуждения теперь объясняют наблюдаемые на практике вещи. Например тот факт, что эффективность каждой отдельной ВМГ непостоянна во всем диапазоне скоростей вращения двигателя (положения газа) и снижается с ростом скорости вращения ротора двигателя.
Также теперь становится понятно почему эффективность большинства двигателей оказывается в какой то момент больше при более низком напряжении питания.
Дело здесь не только и не столько в потерях на сопротивлении обмоток с ростом тока в них. При увеличении напряжения питания регуляторов соответственно увеличивается и напряжение питающих импульсов, поступающих на двигатель. При определенной частоте вращения ротора управляющие импульсы становятся равными вносимой со стороны обмотки задержке, а при дальнейшем росте оборотов питающий импульс становится еще короче, ток в обмотке попросту не успевает достигать своего максимума, возможного для данного напряжения питания. Эффективность падает.
В итоге для каждого конкретного двигателя (с конечными R и L его статорных обмоток) есть конечный энергоэффективный диапазон скоростей вращения с “посильным” ему винтом и при заданном напряжении питания.
Большое Вам спасибо за подробное разъяснение !
Может подскажите и по расчету мощности (пост 2295) ?
Простой стенд для проверки расчетных данных, пробы и принятия решения
rcexplorer.se/projects/…/the-motor-test-stand/ Наглядное руководство для не любищих матанализ
что какая то из последнинких прошивок заставляет моторы плоские икать. И видео было.
Хоть бы кто попробовал газануть на них под нагрузкой и на 4S
Может быть мое видео и было, еще много таких видео на rcgroups в профильной ветке:
3506 + 4s + 20а rctimer прошитый simonk’ом, крайней версией на тот момент. Насколько я знаю, с тех пор у simonk’овской прошивки ничего не изменилось в плане поддержки плоских тайгеров.
Wii-esc в этом плане работает лучше, можно сконфигурить параметры под эти моторы
А кондеры сняты?
за время задержки нарастания тока в обмотке магнитный поток не достигает своего максимума. Таким образом часть энергии импульса не используется эффективно. Чем больше длительность задержки по отношению к длительности всего импульса - тем меньше эффективность преобразования энергии. А длительность питающего импульса зависит от частоты вращения двигателя. Поэтому чем выше скорость вращения, тем меньше получается оставшаяся после задержки нарастания тока длительность времени, когда ток в статорной обмотке достигает своего максимума. И тем меньше эффективность преобразования энергии.
Вот для устранения этого безобразия существуют “тайминги”, а по русски “опережение”.
Вот для устранения этого безобразия существуют “тайминги”, а по русски “опережение”.
Ну да, типа опережения зажигания в ДВС.
Получается что тайминг с низким значением подходит для двигателей с малой задержкой нарастания тока - для многополюсных обмоток с низким сопротивлением и малой индуктивностью (мощные двигатели с низким kV?). Соответственно, высокий тайминг - для менее мощных и оборотистых двигателей. Так?
Да вроде бы наоборот. Чем больше пар полюсов то выше тайминг. Для высокоскоростных 2х полюсных движков всегда лоу тайминг
А кондеры сняты?
а их на этих регулях нет, во всяком случае так мне подсказали уважаемые люди на этом форуме
Вот для устранения этого безобразия существуют “тайминги”, а по русски “опережение”.
они помоему не ставятся в симоновской прошивке
Я бы попробовал
- провода от мотора укоротить
- кондеры снять на регуляторе
- частота обновления шим???
они помоему не ставятся в симоновской прошивке
Возможно прошит режим “автотайминг”.
Неужели??? Данные давайте конкретные , а не слова. И покажите как ваш аппарат тяжелый летает на 3S с этими моторами на 14 и 15 пропах. Уж извените, но он захлебывается на 3S и на 11-х и на 12х, посмотрите в таблицу, где момент предела. И приведите его мощность к его массе, вот собственно и все. Законы физики и ГосДума не отменит.😉
После фактов можно будет продолжить спор.
На 3х банках абсолютно без проблем крутит 14х4.7SF и 15х4 карбон, проверялось на стенде и на реальном аппарате во всех возможных режимах, включая экстремальные вроде газа в пол после снижения “камнем”. Даже при установке низких таймингов вместо рекомендуемых высоких (эффективность на низких таймингах выше).
Убеждать никого не хочу, спорить тоже. Если хотите, можете считать меня лживым пиарщиком Т-моторов 😃
Видео есть только с первой обкатки мотора на карбоновых пропах 15х4 + пара фоток самого аппарата, но фотки только вечером
Видео есть только с первой обкатки мотор
На 2:35 - человек на лыжах ( у ворот ) 😁
На 3х банках абсолютно без проблем крутит 14х4.7SF и 15х4 карбон, проверялось на стенде и …
Подтверждаю. Сегодня проверил тигров 4006-13 (740кв) и 4008-12 (600кв) с регулями Maytech 35A-OPTO 400Hz Simon K прошивка www.rcteam.ru/maytech/mt35a-opto-sf.html на 3S и 4S. Все ОК. Проверил быстренько на 13х6.5 что является хорошей нагрузгой для обоих.
Теперь дело за данными 4008-13
фотки только вечером
MT-4006-13 на раме Turnigy talon v2


На 2:35 - человек на лыжах ( у ворот ) 😁
Ага. Еще кот где-то в начале 😃
Сегодня проверил тигров 4006-13 (740кв) и 4008-12 (600кв) с регулями Maytech 35A-OPTO 400Hz Simon K
А какой У вас сигнал идет, от двигателей при подачи напряжения? Что то он у меня(пи громко + пи тихо), сильно отличается, от сигнала с регуляторами без прошивки(три громких пи). Это так и должно быть?
Приветствую!
Вопрос к обществу:
Наблюдаю на сайте APCprop несколько разных видов пропеллеров. Ну,ладно, допустим кто такие SF я представляю.
А вот в чём разница между, к примеру 12x6P и 12х6EP - один просто pusher, второй- thin electric pusher. Хорошо, судя по названию - первый под ДВС, второй- некий “тонкий для электродвигателей”. Но это мои догадки. А ведь ещё есть 12x6.5WEP. Это я уже и не знаю, кто.
Суть дела такова: выбираю нижние винты для Y6 своего. Был разговор, что нижние надо ставить меньше и шагом больше. Верхние сейчас 13х4,7SF, ещё хочу попробовать 14х4,7SF.
Беда ещё и в том, что на сайте нет фотографий этих пропеллеров, да и описаний - для чего каждый. В результате- я не знаю что выбрать. Может кто знает, где есть фотографии с описаниями, или какие либо будут мысли на эту тему?
а где побюджетнее купить MT-4006-13 ?
у меня рама турнижи талон v2
попробовал DT750 - даже после настольных тестов мотормаунты начинают расшатываться несмотря на лактайд - неплотно обойма подшипников в маунт входит и на двух точках затянутых винтов расшатывается. тоесть в плоскости этих шестигранников люфта нет а поперек расшатывается
на хоббикинге из похожих
NX4008Q но у них треугольником крепление
AX4008 с креплением нормуль но бэкордер
и говорят оба варианта качество похуже чем у тайгеров
Стали интересны тигры плоскодонные в реальном восприятии, а не через е-кальк. Уж больно крутые данные у них на сайте производителя. www.rctigermotor.com/show.php?contentid=148 В общем попробовал эти штучки.
Хороший обзорчик, спасибо ! Такое необходимо в дневник тут помещать, чтобы не потерялось.
Можно фото стенда, на котором проводились эти испытания ?