MultiWii

Я бы вот такой посоветовал www.ebay.com/itm/310625639429...84.m1439.l2649 Там все новые датчики стоят MPU6050 + HMC5883L + MS5611!
Его на прямую подключают к плате ARDUINO или через Logic Level Converter - BOB-08745?
Его на прямую подключают к плате ARDUINO или через Logic Level Converter - BOB-08745?
плата какая? точнее питание меги какое? если 3.3 вольта то без преобразователя уровня можно, да и нужно, а если мега от 5 вольт то преобразователь желателен во избежания ошибок по i2c шине, в принципе можно обойтись и парой резисторов на кажный провод i2c шины, я просто менял 5 вольтовый стабилизатор 328 меги на 3.3 вольта и без всяких преобразователей ошибок ноль, кварц 16 Мгц, все заводиться
на картинке в гуях вижу обратную картину, так и должно быть зеркально?
Не задумывались, почему называется авиагоризонт? Потому что он показывает положение горизонта, а не положение аппарата 😉
плата какая? точнее питание меги какое? если 3.3 вольта то без преобразователя уровня можно, да и нужно, а если мега от 5 вольт то преобразователь желателен во избежания ошибок по i2c шине, в принципе можно обойтись и парой резисторов на кажный провод i2c шины, я просто менял 5 вольтовый стабилизатор 328 меги на 3.3 вольта и без всяких преобразователей ошибок ноль, кварц 16 Мгц, все заводиться
Плата Arduino Pro Mini ATMEGA328 5V. я так понял лучше собрать Logic Level Converter BOB-08745…
будет работать без конвертера. именно эту плату не пробовал но подобные работали без проблем.
В описании
Power supply 3-5V
Means of communication: IIC communication protocol (fully compatible with the 3-5v System, circuit contain LLC)
Вообще не чего не понимаю делаю все по дневнику mataor, компас отключен вообще из конфига, только mpu6050 в положении стоим на земле acc roll,pitch хумит в районе ±15-20; Z 500±20; gyro roll 0, pitch 0 yaw 1-3;
а) при наклоне вправо должен увеличиватся угол ROLL по акселю и положительный скачок ROLL по гироскопу, Z ось акселя и компаса должны уменьшатся. (условия выполняются)
б) при наклоне вперед - аналогично по PITCH, Z ось акселя и компаса должны уменьшатся. (условия выполняются)
в) при наклонах влево и назад - значения должны быть минусовые, Z ось акселя и компаса должны уменьшатся. (тоже все гуд)
г) при подъеме вверх (с норм скоростью) должен увеличиваться Z акселя, при переворачивании - менять знак (тут печальнее Z акселя при подеме не меняется при переворачивании(если правильно понял коптер вверх брюхом) уменьшается до 200 знак не меняет, yaw gyro без изменений, вообще ни в каких положениях(тоесть как бы я квадрик не крутил-вертел yaw gyro всегда ноль)
не уж то уж вторая микруха дохлая? быть токого не может, куда рыть?
по Z оси акселя - поменять ориентацию попробуйте.
по гирику - точно сказать не могу… попробуйте отрубить компас и порезче покрутить - в гуи должен поворачиватся
Добрый день. Подскажите пожалуйста, пришел вот такой блютус www.ebay.com/itm/121141213048 , если предположить что у него уже исправлена скорость на 115200 то в какой порт AIO v2 его надо подключать чтоб он заработал в multiwii 2.3? и нужно ли в multiwii что то менять в конфиге?
в какой порт AIO v2 его надо подключать

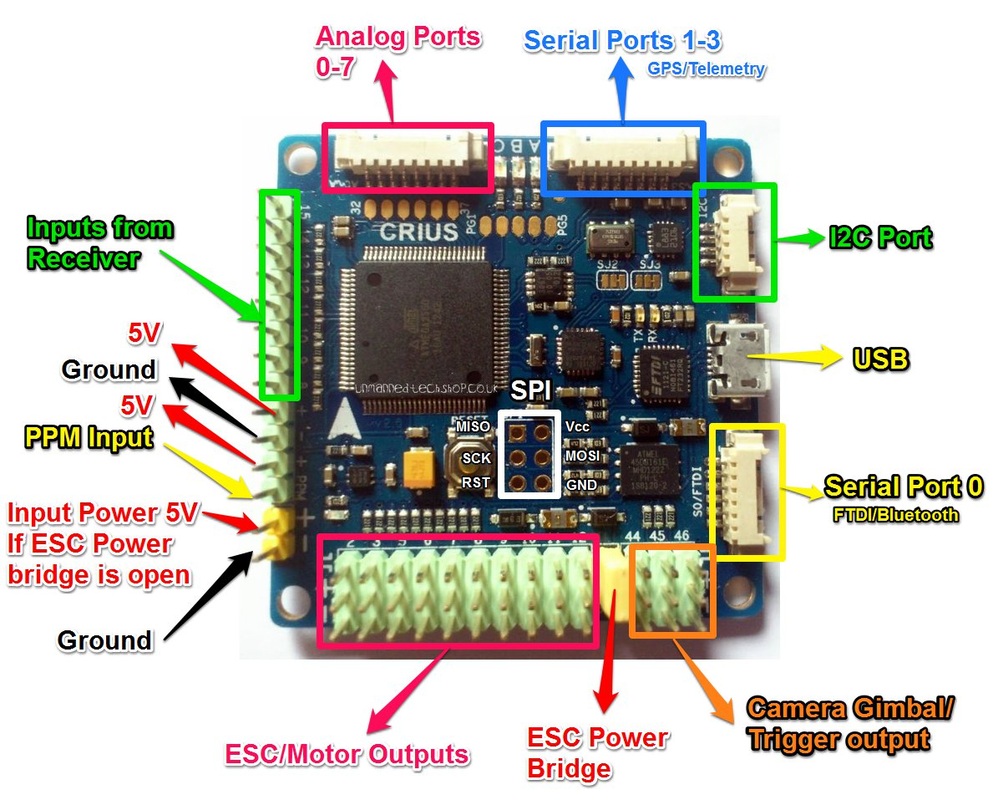
Я конечно извиняюсь но как на выше указанной схемке изображен (подписан) блютус? И нужно ли что-то разкоментировать/закоментировать в multiwii?
блютус - это практически тот же модем, но с меньшим радиусом действия. подключать в любой серийный порт. у меня в коптере первоначально был установлен в serial0, но при таком подключении нельзя было одновременно подключить блютус и USB, позже, переставил в serial1. подключить просто, но в прошивке на порте, в который подключаете блютус, должна быть выставленна скорость 115900, ну и сами провада правельно соедени: земля-земля, +5 - +5, tx-rx, rx-tx
будет работать без конвертера. именно эту плату не пробовал но подобные работали без проблем.
В описании
Попробовал… вроде работает цеплял к плате Arduino Pro Mini ATMEGA328 5V только GY-85 (гироскоп акселерометр магнитометр).
ВОЗНИК ВОПРОС - в прошивках 2.0 и выше , для запитки гира “12 нога” не используется? (У меня плата гира не завилась.) С какой ноги брать “+” питание
И так всевышний генералитет дал добро и мы полетели))) еще как полетели, дело было в обвязке mpu6050 тупа сдул всю обвязку заменил и о чудо по всем трем осям завелось и полетело, всем наставлявшим на путь истинный земной поклон и уважение)))) спасибо короче парни!!! остался только один момент не могу ни как напругу(одна банка 3.7В) правильно чтоб мерило((( резюки по 10Кило vbatscale 114 vbat 42 , показывает 8.8 вольта, ставлю резюки как в сонфиге 11 вольт как правильно посчитать подскажите?
остался только один момент не могу ни как напругу(одна банка 3.7В) правильно чтоб мерило((( резюки по 10Кило vbatscale 114 vbat 42 , показывает 8.8 вольта, ставлю резюки как в сонфиге 11 вольт как правильно посчитать подскажите?
Вот тут про расчёт rcopen.com/forum/f123/topic221574/10400
ставлю резюки как в сонфиге 11 вольт как правильно посчитать подскажите?
Зачем так сложно? Я поставил переменное сопротивление 10к, выставил нужное показание. Потом измерил его и заменил двумя постоянными сопротивлениями.
Подскажите пожалста. Столкнулся при настройке со следующим:
В одном мануале по настройке ПИД написано - “установить П в 0 и начинать отстраивать”
в другом - “установите рекомендованные по умолчанию значения коэффициентов ПИД-регулятора” - где эти рекомендованые взять? (те что по умолчанию в прошивке идут?) Если плясать о настроек по умолчанию то как узнать от какого ПИДа происходит осциляция?
Так вот так до сих пор и не понял как эти ПИДы настраиваются - чё то покручу - вроде летает, всегда кручу - почти всегда летает, правда не так стабильно как мне надо.
Какие ПИДы конкретно крутить для стабильного висения на месте для начала? И от куда? от нуля или дефолтных?
И кстати вытекающий вопрос что означают ПИДы ALT, Pos, PosR, NavR, MaG?
Сейчас ПИДы минимальны происходит осциляция левой диагонали лучей(если по курсу смотреть) - что крутить не пойму.
Доброго дня.
Помогите увязать связку ublox 6m, i2c-gps-nav и плата HK 328p с дсм портом которая…
В модуле gps выставил скорость 115200 и 10герц, модуль i2c-gps прошил с параметрами 115200 и ublox, в коде мультивия выставил что gps идет по i2c-gps…
и нифира… не идут данные…
Куда еще крутить не пойму… и скорости менял на различные и протоколы…
не вяжется…
Сам модуль в конфигураторе спутники ловит…
Если кто откликнется… буду сильно благодарен.
Доброго дня.
Для начала надо разобраться видит ли плата I2C-GPS ваш модуль, по индикаторному светодиоду на плате.
* 3 short flash at startup
* blinks once per second if GPS is sending data but no position lock yet
* blinks twice fast, then off for a second if GPS 2D position is available
* blinks 3 times fast, then off for a second if GPS 3D position is available
* or goes on for a second, off for a second, (long pulse) if not getting any NEMA sentences for over 5 seconds
Затем проверить наличие подтягивающих резисторов на плате или мозгах. Проверить подключение к мозгам, sda>sda scl>scl.
плату i2c брал на rctimer
диод на на плате постоянно моргает с частотой раз в секунду… походу данные не идут
плата с модулем gps должна соединятся tx>txб rx>rx или tx>rx rx>tx ?
Все… разобрался…
Дело было в шнурке межу модулем и платой i2c-gps
Родной шнурок от платы соединет тх с tx rx с rx
перевернул провода на тх с rx и rx с tx и все заработало
Вобщес два дня дикого перешивания оказались не нужными… 😃
Вобщем неправильный шнурок от китайцев с платой… а я и не подумал…
доброго всем дня. у меня такая ситуация, когда даю газ моторы сначала раскручиваются равномерно, но два мотора по диагонали постепенно начинают терять обороты. вот как это выглядит в гуи. как это побороть?


как это побороть?
С пропеллерами ? или без ?
каналы не по 1500
АСС не в нолях (-2, -3)