MultiWii

понял, буду пробовать.
К нему лучше припаиваться, или сделать на коннекторах? Значения же не должно быть…
ну я бы коннекторов припаял… каждый раз паяльник разогревать 😉
ну я бы коннекторов припаял… каждый раз паяльник разогревать
у меня была мысль, что я и не туда могу напаять, теперь она подтвердилась)))
что там можно не туда напаять то… ну так, чтоб это критично было…
полез посмотреть что за плата, читаем там же
Comes preloaded with Arduino bootloader (Leonardo)
так что прошивать/заливать точнее надо будет мультивий почти 100%
что там можно не туда напаять то…
провода местами перепутать))))
Comes preloaded with Arduino bootloader (Leonardo)
так что прошивать/заливать точнее надо будет мультивий почти 100%
Мне это ни о чем не сказало… Но, видимо, интуитивно я почусвтвовал, что он к работе не готов
Какая прошивка нужна? Ее самому писать или где-то общий конфиг можно скачать?
купленная плата - это просто на одной плате адруина + датчики; ардуина - это просто контроллер, который прошивается или программаторов, или заливается в него код бутлоадером
ардуине глубоко пофиг, как ее называют - мультивий, маховий, бредвий 😃 в нее втыкается ftdi переходник, запускается arduino.exe в компе, загружается “скетч”, нажимается кнопочка - скетч компилируется и если все ок, заливается в контроллер
если верить описанию на сайте, то сейчас в ардуине только бутлоадер - когда включаем контроллер, тот с помощью бутлоадера смотрит, не подключен ли он к компу и не заливается в него что-нибудь
так что читать фак, качать 2.3 архив с скетчем, править под себя config.h, заливать прошивку и тогда уже что-то может полететь
У меня был такой контроллер, купил уже прошитым (не помню версию). А вообще на плате есть юсб, через него и прошивка льется и гуй цепляется.
Купил другой, вот такой. Сказали с ним тоже можно летать.
Была такая же платка, сначала на стандартной летал прошивке, потом залил маховика базовуюrcopen.com/blogs/83206/17033 и разница ощутилась огромная, и практически без каких-либо настроек 😃
я что-то запамятовал (особенно учитывая, что последний самолет с мвии летал без бародатчика) - что, если включена “галка” BARO (что бы она ни значила), то нельзя арм сделать?
может это и есть моя бага… настроил “по минимуму”, проверил, дотыкал галочки магнетометра/барометра (включено всегда) - не работает
проверю только вечером

а в чем смысл? типа чтоб не включить движки и они сразу не ломанулись куда-то лететь, потому что барометр штука неточная и показывает плюс-минус пол-сапога?
з.ы. все равно не очень верится, что в этом дело… надо разбираться - я ж наивно уже думал, сегодня вечерком опробую… а тут затык этот
з.ы. все равно не очень верится, что в этом дело… надо разбираться - я ж наивно уже думал, сегодня вечерком опробую… а тут затык этот
Попробуйте оттримировать аппу или расширить диапазон/расходы в настройках (по троттлу)
все вообще как по писаному - все стики двигаю, расходы в гуе строго 1000-2000, серединки на 1500 (ну +/- 2 пункта не считаются)
я с этим контроллером (crius se v2) 3 коптера построил, потом запустил его на “икаре”, закирпичил мегу; запустил крыло на ардуине+датчики, починил контроллер… все работает после “резета”, но только один раз - так что настроить как-то уже вроде умею
В общем навел тут паники, а все просто оказалось - действительно дело было в том, что барометр включен все время был, это и не давало армить мотор
Все работает… Интересно, может в 2.2 так не было? Вроде на коптере всегда включен был и барометр, и магнетометр…
это умножение команды со стика по сути дела
lookupPitchRollRC[i] = (2500+conf.rcExpo8*(i*i-25))*i*(int32_t)conf.rcRate8/2500;
RC RATE и PID RATE меняли?
А вообще скриншот GUI в студию.
Вот скриншот моей среды. RC RATE из программы куда-то делось и осталось только RATE внизу 😃 Подозреваю, что это одно и то же, да? Увеличил до двух. Было чуть меньше единицы. Теперь буду крутые сальто крутить или сразу планету на взлете поймаю? 😃
Подскажите, а AIOP v.2 действительно способен отрабатывать 3-х осевой подвес или все же тупит? Неважно на какой прошивке: мультивий, мегапират, маховика.
Ребята подскажите что делать. Скачал прошивку 2.1, с ней все норамльно работает и прошивается. А вот с прошивками 2.2 и 2.3 AruinoIDE выдает ошибки. Программа самая последняя с оф.сайта. Короче выбираю свои датчики(ITG3200, BMA180, BMP085, HMC5883), проверяю и прога выдает кучу ошибок компиляции. Как с этим справиться?
Выдает вот что:
Build options changed, rebuilding all
Sensors.cpp: In function ‘void ACC_getADC()’:
Sensors.cpp:886: error: ‘accADC’ was not declared in this scope
Sensors.cpp: In function ‘void Gyro_getADC()’:
Sensors.cpp:1087: error: ‘gyroADC’ was not declared in this scope
Sensors.cpp: In function ‘void getADC()’:
Sensors.cpp:1326: error: ‘magADC’ was not declared in this scope
Может все таки кто что подскажет? Сразу скажу, что версию arduino IDE пробовал менять, ничего не помогает.
Подскажите, а AIOP v.2 действительно способен отрабатывать 3-х осевой подвес или все же тупит?
А чем это он отрабатывать должен? Там всего два выхода Рол и Питч, ну и выход для спуска затвора камеры или включения записи. И подвес, если и подключать то только на сервах
Может все таки кто что подскажет? Сразу скажу, что версию arduino IDE пробовал менять, ничего не помогает.
А плата какая? Датчики по отдельности нужно выбирать только если платы нет в списке. А так, выбираете плату из списка и все… (остальные параметры под себя, типа тип рамы, GPS, настройка файлсейв, измеритель напряжения батареи и тд)
А чем это он отрабатывать должен?
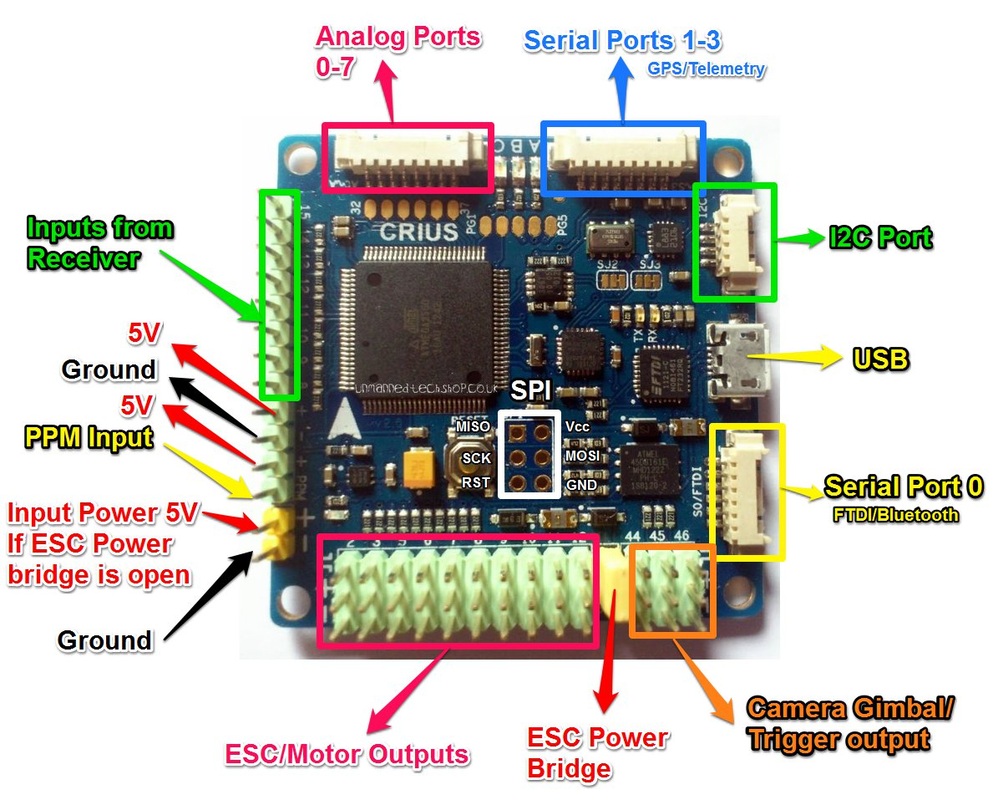
Нижний правый угол. Пины с маркировкой 44, 45, 46.
И строчка с оффициального сайта: www.rctimer.com/product_765.html
“8-axis motor output and 3 servos output for gimbal system”
Не оно?
“8-axis motor output and 3 servos output for gimbal system”
Ну вы бы прочитали на картинке “Camera Gimbal” и “Trigger output” то бишь подвес камеры и триггер (это для включения записи) и я вам вроде тоже самое написал?
Это для 2-х осевого подвеса на сервах.
Ну вы бы прочитали на картинке “Camera Gimbal” и “Trigger output” то бишь подвес камеры и триггер (это для включения записи) и я вам вроде тоже самое написал?
Это для 2-х осевого подвеса на сервах.
Я с вами согласен, что это работает для первой версии. На официальном сайте так и написано:
·2 servos output for PITCH and ROLL gimbal system
·A servos output to trigger a camera button
Единственная мысль, что в описании про вторую версию строчку “3 servos output for gimbal system” они объединили как две предыдущие строчки и триггер как бы включили в “Систему подвеса”.
Первая от второй отличаются компановкой, наличием флеш памяти (актуально для МП) и наличием перемычек SJ1, SJ2 (это что бы дорожки не резать при подключении внешнего компаса). И все
Но если вы уверены, что плата должна рулить 3-х осевым подвесом, воля ваша! подключайте…
Но если вы уверены
Если бы я был уверен, я бы не спрашивал 😃 Просто пытался разобраться в описании.