MultiWii

это умножение команды со стика по сути дела
lookupPitchRollRC[i] = (2500+conf.rcExpo8*(i*i-25))*i*(int32_t)conf.rcRate8/2500;
RC RATE и PID RATE меняли?
А вообще скриншот GUI в студию.
Вот скриншот моей среды. RC RATE из программы куда-то делось и осталось только RATE внизу 😃 Подозреваю, что это одно и то же, да? Увеличил до двух. Было чуть меньше единицы. Теперь буду крутые сальто крутить или сразу планету на взлете поймаю? 😃
Подскажите, а AIOP v.2 действительно способен отрабатывать 3-х осевой подвес или все же тупит? Неважно на какой прошивке: мультивий, мегапират, маховика.
Ребята подскажите что делать. Скачал прошивку 2.1, с ней все норамльно работает и прошивается. А вот с прошивками 2.2 и 2.3 AruinoIDE выдает ошибки. Программа самая последняя с оф.сайта. Короче выбираю свои датчики(ITG3200, BMA180, BMP085, HMC5883), проверяю и прога выдает кучу ошибок компиляции. Как с этим справиться?
Выдает вот что:
Build options changed, rebuilding all
Sensors.cpp: In function ‘void ACC_getADC()’:
Sensors.cpp:886: error: ‘accADC’ was not declared in this scope
Sensors.cpp: In function ‘void Gyro_getADC()’:
Sensors.cpp:1087: error: ‘gyroADC’ was not declared in this scope
Sensors.cpp: In function ‘void getADC()’:
Sensors.cpp:1326: error: ‘magADC’ was not declared in this scope
Может все таки кто что подскажет? Сразу скажу, что версию arduino IDE пробовал менять, ничего не помогает.
Подскажите, а AIOP v.2 действительно способен отрабатывать 3-х осевой подвес или все же тупит?
А чем это он отрабатывать должен? Там всего два выхода Рол и Питч, ну и выход для спуска затвора камеры или включения записи. И подвес, если и подключать то только на сервах
Может все таки кто что подскажет? Сразу скажу, что версию arduino IDE пробовал менять, ничего не помогает.
А плата какая? Датчики по отдельности нужно выбирать только если платы нет в списке. А так, выбираете плату из списка и все… (остальные параметры под себя, типа тип рамы, GPS, настройка файлсейв, измеритель напряжения батареи и тд)
А чем это он отрабатывать должен?
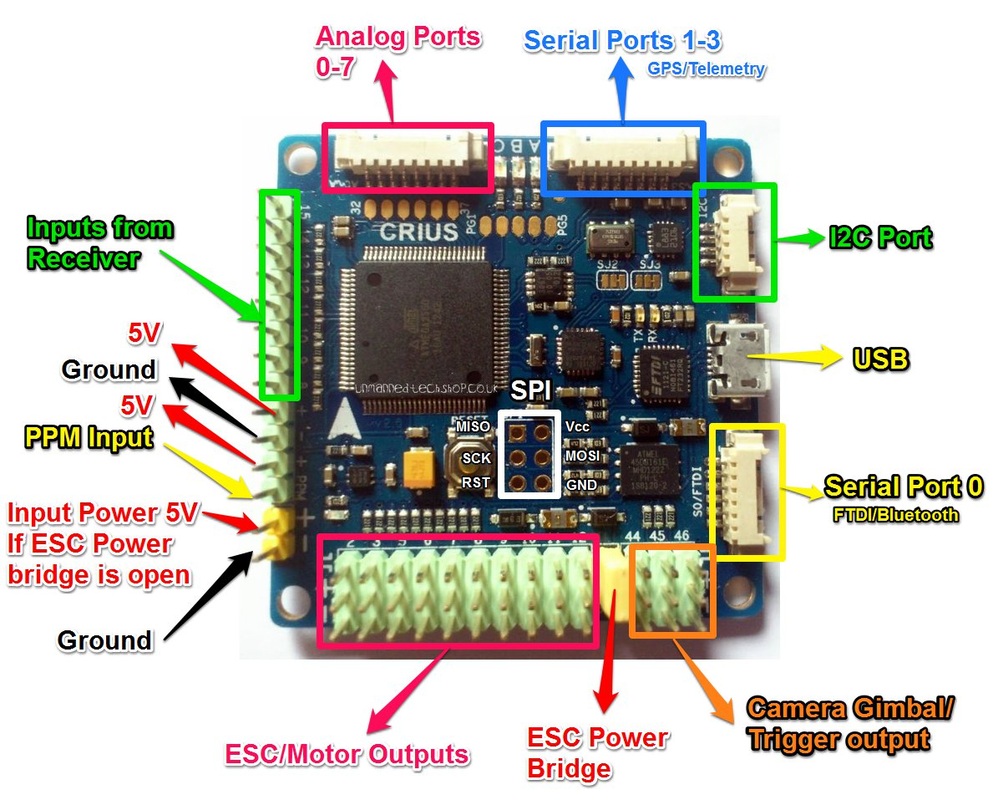
Нижний правый угол. Пины с маркировкой 44, 45, 46.
И строчка с оффициального сайта: www.rctimer.com/product_765.html
“8-axis motor output and 3 servos output for gimbal system”
Не оно?
“8-axis motor output and 3 servos output for gimbal system”
Ну вы бы прочитали на картинке “Camera Gimbal” и “Trigger output” то бишь подвес камеры и триггер (это для включения записи) и я вам вроде тоже самое написал?
Это для 2-х осевого подвеса на сервах.
Ну вы бы прочитали на картинке “Camera Gimbal” и “Trigger output” то бишь подвес камеры и триггер (это для включения записи) и я вам вроде тоже самое написал?
Это для 2-х осевого подвеса на сервах.
Я с вами согласен, что это работает для первой версии. На официальном сайте так и написано:
·2 servos output for PITCH and ROLL gimbal system
·A servos output to trigger a camera button
Единственная мысль, что в описании про вторую версию строчку “3 servos output for gimbal system” они объединили как две предыдущие строчки и триггер как бы включили в “Систему подвеса”.
Первая от второй отличаются компановкой, наличием флеш памяти (актуально для МП) и наличием перемычек SJ1, SJ2 (это что бы дорожки не резать при подключении внешнего компаса). И все
Но если вы уверены, что плата должна рулить 3-х осевым подвесом, воля ваша! подключайте…
Но если вы уверены
Если бы я был уверен, я бы не спрашивал 😃 Просто пытался разобраться в описании.
Если бы я был уверен, я бы не спрашивал
Ну так дважды ответил… и вы на картинке видите надпись Yaw (в управление подвесом)? А в Гуи или в МП видели управление по Yaw? О чем вопрос???
не подскажет ли кто мне, в какую сторону (от дефолтных) менять (и надо ли) пиды для мультивия на маленьком квадрокоптере?
230 мм диагональ
сегодня посылка с пропеллерами пришла + погода отвратительная летать была, так сделал квадрик на 5" пропеллерах
хоть мелкий, но в квартире запускать стремно (да и час ночи - меня выкинут из дому вместе с квадриком), так что запуск завтра - просто чтоб знать, к чему готовится
mwii 2.3 стоковая, гироскоп+акселерометр и все (барометр и копас можно прицепить, но думаю с его размером оно ему ни к чему)
А плата какая? Датчики по отдельности нужно выбирать только если платы нет в списке. А так, выбираете плату из списка и все… (остальные параметры под себя, типа тип рамы, GPS, настройка файлсейв, измеритель напряжения батареи и тд)
Платы в списке нет. Поэтому и выбираю отдельно датчики.
Друзья! Вот это что? code.google.com/p/mw-wingui/downloads/detail?name=…
MultiWii 2.3-navi-b5-baroFix - 5th beta version of the multiwii waypoint navigation system fixed baro error
полет по точкам от мультивия? , типа уже приделали…
типа уже приделали
ПриделыВАЮТ, видимо. Написано же. Пятая бета полёта по точкам.
Коллеги, а есть такая штука, что бы зад коптера всегда смотрел на меня? С Headfree мегаудобно, но когда хочется повернуться направо/налево/развернуться, то он же продолжит верить компасу. Т.е. хочется что бы он всегда был повёрнут к точке старта попой 😃 Я так понимаю, адвансед хэдфри - не совсем то, что я хочу.
хмм… как раз адвансед - это и есть то что нужно, если только вы не желаете чтобы он смотрел на точку старта именно задницей а не по управлению
Хмм. Да, внимательно почитал. Кажется да. Т.е. вылетаем дальше ADV_HEADFREE_RANGE, включается HEADFREE, а залетаем обратно, лочится по компасу, что бы я не потерял управление, так?
Кто-нибудь уже это тестил? Боязно как-то 😃
Поиск по теме не выявил обсуждений на эту тему.
немного не так: внутри круга диаметром (или радиусом) ADV_HEADFREE_RANGE режим HEADFREE работает как обычно, а снаружи - задом на дом
но соответственно требуется отлаженный компас и ЖПС
у маховика в дневниках поковыряйтесь… гдето-там проскакивало, толь в тексте толь в комментариях
но соответственно
Это само собой. С кривым компасом несёт не туда, проверил уже 😉
А, ну т.е. этот “круг” нужен, видимо, т.к. есть погрешность. Если его сделать маленьким, то управлять, наверняка, вообще будет не реально. Окей, это интересно всё равно. Надо будет как-нибудь таки попробовать 😃
А всё таки, пробовал кто-то или нет?
А всё таки, пробовал кто-то или нет?
я пробовал пару раз и даже посадил удачно коптер, когда зарулился…
описание тут (пункт 8) rcopen.com/blogs/83206/16327
Теперь буду крутые сальто крутить
Иван, спасибо вам за статью на хабре habrahabr.ru/post/227425/
вы ее пропиарте тут на форуме или в дневник себе напишите. Новичкам (и не только) будет полезно!
еще понравился инженерный подход в поиске потерянного коптера 😃 kopterovod.ru/kompyuternoe-zrenie-na-kvadrokoptere…
описание тут
О, спасибо за HEADADJ, я не знал, что он делает.
Теперь мне надо новый пульт, т.к. 6 каналов катастрофиццски не хватает 😃