Делаем раму коптера своими руками. Обмен опытом.

В данной конфигурации его постоянно заваливало назад при взлете. Начал разбираться, понял, что ЦТ сильно смещен назад.
Для начала я бы перешил регуляторы. После Мультистаров я не доверяю стоковым мультироторным прошивкам. Акселерометр правильно откалиброван? Возможно ПИДы слабенькие, Р попробовать поднять по ролл и питч.
Для начала я бы перешил регуляторы.
Что посоветуете?
Акселерометр правильно откалиброван?
Выставлял на столике с водяным уровнем несколько раз перепроверял, и разными сторонами ставил коптер на столик, аксели откалиброваны в ноль.
Возможно ПИДы слабенькие, Р попробовать поднять по ролл и питч.
Настраивал как советовали в одном видео. Поднимал до тех пор, пока рама не начинала вибрировать, потом сбросил 15-20%. Сейчас не помню точно, но что-то около 7 получилось.
Что посоветуете?
Не знаю что там внутри, нужно гуглить. Возможно Симонк.
Да, в моем Емакс по умолчанию (ну как на сайте написано) стоит Симонк.
Да, в моем Емакс по умолчанию (ну как на сайте написано) стоит Симонк.
Проверьте триммера на аппе, все ли в центре стоит. С отключенным акселем тоже криво взлетает?
Триммера в нуле. Без акселя надо будет попробовать, такой эксперимент еще не проводил.
Но ситуацию это не изменило,
Выскажу своё предположение - провода от моторов идущие к ESC слишком длинные, а вернее - “задние” длиннее “передних” и из за разного падения напряжения, получается разбаланс… выход: или сделать более толстые провода или уравнять их по длине… (вообще то такие длинные фазовые провода - ни есть гуд…)
Народ, а кто где берет стойки (дистансеры) для самодельных рептилий, tcb и тд? там, по моему, 36-37 мм.
Есть идея как поступить когда нет дистанционных втулок . Берем вытягиваемые заклепки разной длинны ,
выбиваем гвоздик и собираем из двух заклепок нужной длинны втулку . Собираем на винты М3 , при необходимости можно одеть термоусадку ,как на фото .
хостинг картинок
Что посоветуете?
Выставлял на столике с водяным уровнем несколько раз перепроверял, и разными сторонами ставил коптер на столик, аксели откалиброваны в ноль.
Настраивал как советовали в одном видео. Поднимал до тех пор, пока рама не начинала вибрировать, потом сбросил 15-20%. Сейчас не помню точно, но что-то около 7 получилось.
Я бы посоветовал поменять контроллер полета. Поставить CC3D.
Вот тоже аккумулятор не в центре.
Ни каких настроек не делал, прошел только визард.
Никакими уровнями не пользовался. Висит как прибитый даже без GPS:)
О вибрация тоже даже не задумывался, балансировку не делал.
Цена - бюджетней не бывает.
Интересная рама, есть чертежик?
Есть идея как поступить когда нет дистанционных втулок . Берем вытягиваемые заклепки разной длинны
Удобней использовать заклепки с головкой впотай
У стойки получается плоское основание-фланец. Стойка получается устойчивой, достаточно одной заклепки нужной длины.
Кроме того номинальный размер такой заклепки совпадает с ее длиной
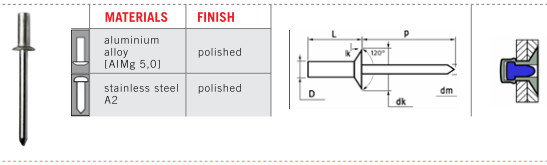
У остальных длина больше номинала на высоту головки:
Я бы посоветовал поменять контроллер полета. Поставить CC3D.
а он научился человечески возвращаться при потере сигнала домой ?
а он научился человечески возвращаться при потере сигнала домой ?
и не научится. у него для этого нету нужных датчиков
а он научился человечески возвращаться при потере сигнала домой ?
Нет, не научился. Revo научился, но он дорогой.
И кстати ему тоже наплевать на то, как стоит аккумулятор.
Нет, не научился. Revo научился, но он дорогой.
И кстати ему тоже наплевать на то, как стоит аккумулятор.
Мультивию тоже наплевать, просто нужно ПИДы под ВМГ и раму подстроить.
Вот мой старенький коптер на Вие с подвесом, как видно - никакого баланса, подвес спереди ничем не уравновешен. Хорошо летал.

Ну, может у Crius Multiwii SE очень продвинутый софт. Просто по опыту, у меня независимо от рамы и контроллера - если тянет в сторону, чаще всего было не правильная начальная калибровка.
Сейчас отрисована вторая версия такой рамы, облегченная, с заложенными выкосами в 5гр., более жесткая, с исправленными просчетами и ошибками. Соберу, облетаю и выложу чертежи.
Ждемс обещаных чертежей !!!
экспериментировал с балансом на мелколете 250 класса, под управлением CC3D
куда только не вешал аккум, в том числе и на самый край луча
взлетает честно говоря плохо, сильно тянет в сторону при медленном взлете, рывком взлетать намного легче
но после взлета так же точно висит на месте и никуда не уплывает (мозг без GPS)
но! в радикальном варианте (аккум на луче) очень плохо поворачивает по yaw, поворот осуществляется как раз вокруг ЦТ, т.е. аккума, с сильным завалом коптера, что приводит к смещению
но опять же стоит учитывать что вес коптера в этой конфигурации около 300гр а аккума около 200гр
Коллеги, пришел за советом.
Собственно есть гекса ~800 размер.
Текущая версия рамы (центральная часть) сделана из текстолита 1,5 и 2мм. (чпу распил)
Сейчас решил делать новую раму, смотрю в сторону фанеры 3мм…что скажете насчет данного материала в плане веса\жесткости? Пилить думаю сам электролобзиком…затем груновать и красить.
ейчас решил делать новую раму, смотрю в сторону фанеры 3мм…
это хреновая идея. Будет очень мягкой и не надежной. Поставьте карбон 1,5мм, порезаный на ЧПУ, будет прекрасно.
смотрю в сторону фанеры 3мм…
у меня по моему 4-мм отличная жёсткость. правда размер под 12 винты всего. вот на счёт грунтовать и красить… утяжелять только. А так то карбон конечно легче.