Делаем раму коптера своими руками. Обмен опытом.

Я где-то писал про сложнее? Сергей писал лишь бы поспорить, похоже вы тоже. Хотите что-то реально обсудить - пожалуйста, нет - разговор окончен.
А какой вес рамы (без шасси, моторов-пропов и остальной и начинки, только рама) считается более менее приемлемым для 450 размера ?
А какой вес рамы (без шасси, моторов-пропов и остальной и начинки, только рама) считается более менее приемлемым для 450 размера ?
150 грамм это будет легкая рама, 300 грамм - тяжелая, а приемлемо - ну, где-то между.
Как уже писали, коптер это не маятник
Вы это серьёзно? И корабль в море, и любой аппарат в воздушной среде - не подвержены маятниковой раскачке? Вы ещё многое тогда не видели…
Вы это серьёзно? И корабль в море, и любой аппарат в воздушной среде - не подвержены маятниковой раскачке? Вы ещё многое тогда не видели…
Как масса будет стабилизировать коптер вертикально? Почему когда масса внизу вывести из равновесия сложнее чем когда сверху?
Сопромат, теормех и техмех нам в помощь. Воздух- не асфальт. Опора та ещё. У коптера есть центр давления и центр масс. И если центр масс ниже центра давления, то результирующая всех сил, приложенных к коптеру будет стремиться поместить центр масс под центром давления. Обеспечивая стабилизирующий эффект. Если нам конечно требуется, чтобы коптер лежал в воздухе в горизонтальной плоскости.
Любое другое положение центра масс относительно центра давления будет выводить коптер из равновесия. А плечо от центра масс до центра давления будет создавать ту самую стабилизирующую силу. Пропорциональную расстоянию между центрами.
Вроде бы просто и понятно
Сопромат, теормех и техмех нам в помощь. Воздух- не асфальт. Опора та ещё. У коптера есть центр давления и центр масс. И если центр масс ниже центра давления, то результирующая всех сил, приложенных к коптеру будет стремиться поместить центр масс под центром давления. Обеспечивая стабилизирующий эффект. Если нам конечно требуется, чтобы коптер лежал в воздухе в горизонтальной плоскости.
Любое другое положение центра масс относительно центра давления будет выводить коптер из равновесия. А плечо от центра масс до центра давления будет создавать ту самую стабилизирующую силу. Пропорциональную расстоянию между центрами.
Вроде бы просто и понятно
Если говорить про аэродинамику, то центр давления зависит от множества факторов, (формы тела, от свойств окружающей среды и направления движения) понятно что неравномерный обдув коптера относительно центра масс будет создавать изменение ориентации, но это не стабилизация, а скорее наоборот, дестабилизация, которая парируется тягой винтов. И уж совсем не факт, что коптер будет стремиться к горизонтальной плоскости. Тем более когда он висит в горизонтальной плоскости воздействие воздуха минимально и центр давления не понятно где.
Вопрос вообще был в том, что масса сама стабилизирует коптер в вертикальном положении, что конечно не верно, в безвоздушном пространстве тела падают не меняя ориентации.
Дорогой Денис! Я потратил своё время на то, чтобы кратко, с академической сточки зрения описать Вам силы, воздействующие на лбое тело, падающее, летящее или зависшее в земной атмосфере. Если Вы не поняли или Вам хочется пофлудить- пройдите мимо моего поста.
Никакой автостабилизации не будет. Разница только в центре вращения. Это уже было доказано и показано на ютубе.
Это уже было доказано и показано на ютубе.
Ну эта картинка ничего не доказывает. Кроме того, что. Если большая точка центр масс, а маленькие точки ось винтов, то объект всегда будет как на картинке справа. Т.е. если центр масс поднять над точками винтов, то он вернется в исходное состояние, если не прикладывать силу для удержания.
Никакой автостабилизации не будет
За стабилизацию у нас отвечает ПК и он может застабилизировать нелетаемое. Речь в данном идет о дополнительных усилиях.
Спор бесконечный и не о чем. Он просто показывает способность или неспособность народа выделять главное.
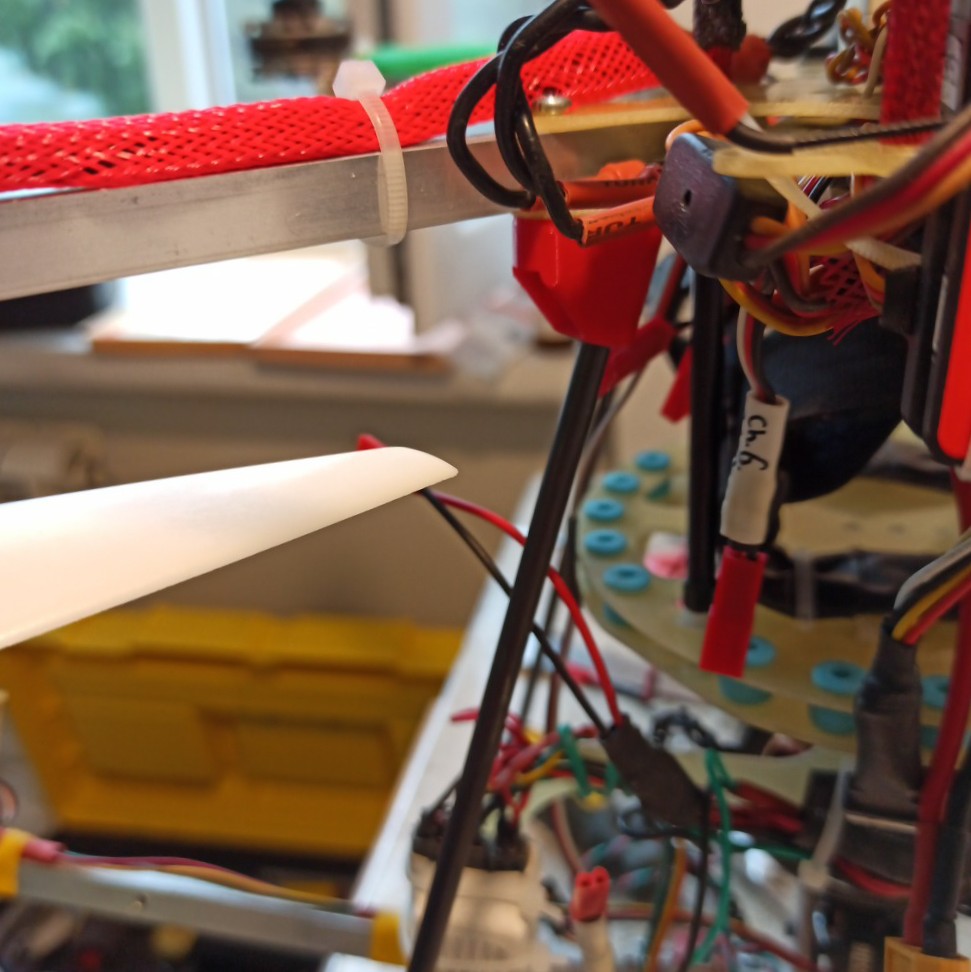
Вот такой агрегат собрал. 450мм диагональ.
14мм квадратный профиль из Леруа, алюминий на верх/низ - пластины 1,6мм оттуда же.
Раму делал из головы, не опираясь ни на какие чертежи. Получилось достаточно прочно.
В местах сверления под болты профиль усилен 3д печатными вставками. Моторам защиту нарисовал и напечатал.
Рама без ножек вышла весом примерно грамм 240-250, точно не взвешивал, к тому времени уже собрал коптер.
Моторы Readytosky RS2312 920kv, пропы 1045.
Регули simonk 30A, полетник cc3d mini (stm32f1) на Inav. - из того что завалялось… К полетнику прикрутил барометр на flexiport по i2c.
Приемник FlySky подключил по IBUS на softserial, хотя если надумаю GPS модуль поставить, придется перейти на PPM чтоб освободить softserial. На оставшийся main порт планирую microminimosd подключить.
Сегодня опробовал в полете, с батарейкой 3s 1500mah взлетает меньше чем в пол газа. Летает…
Надо будет взвесить коптер в сборе, без батарейки…
Осталось довесить камеру+передатчик+microminimosd для фпв, и придумать крепление для экшн камеры, подстроить PIDы.
Надо будет взвесить коптер в сборе, без батарейки…
Хотя бы половину отпилите, а то будет летать 10 минут с подвесом.
Хотя бы половину отпилите,
Половину чего ?
Рама в любом случае экспериментальная и легче/прочнее покупной f450 с ногами
Поворотный подвес пока не планирую.
Вес коптера в сборе без батареи (и фпв) 754 грамма
Народ добрый день подскажите хочу для квадра распечатать часть рамы какой пластик выбрать есть petg, pla и abs.
Половину чего ?
Металла, в пластинах. Который не работает и только увеличивает вес.
Уже неоднократно обсуждали. См. например здесь
Исходные “квадраты” надо было облегчать изнутри, а не подгрызать сбоку.
Да и профиль для таких размеров коптера/винтов можно взять 10х10х1.0, вполне хватит. Крепежа достаточно М2,5мм, или вообще посадить на заклепки 3мм.
Лучше возить более емкие/тяжелые аккумуляторы, чем бесполезный балласт.
Половину чего ?
Всего.
На лучи 10мм квадрат достаточно. Пластины - стеклотекстолит 1mm.
Регуляторы тоже в два раза более лёгкие.
Пластиковую защиту выбросить.
Болтики м2-м2.5
Приёмник заменить на нормальный, раза в три меньше весит.
Тогда и на 20-30 минут с подвесом можно попробовать выйти.
Металла, в пластинах. Который не работает и только увеличивает вес.
Читал, видел. У меня весь коптер чуть тяжее чем та табуреточная рама.
Но, для первой пробной рамы не стал связываться. Временные затраты по фигурному выпиливанию не сопоставимы с выигрышем в весе. Плюс с цельными платинами проще решаются вопросы компоновки.
Подгрызка сбоку скорее пробный/дизанерский вариант.
Да и профиль для таких размеров коптера/винтов можно взять 10х10х1.0, вполне хватит.
Его нет в нашем Леруа, квадрат 14х14х1 минимальный. Либо П профиль 10х15х10х1 - он чуть легче, но не удобен.
Крепежа достаточно М2,5мм,
С 4мм я конечно перестарался… но гигантского выигрыша в весе оно не дало бы. Замена всего крепежа м4 (10 болтов, 20 кузовных шайб, 10 гаек с фиксатором) на м3 (болт, кузовная шайба, гайка с юбкой против отвинчивания) это ~20 грамм выигрыша, не более. Взвесил болты и прикинул разницу в весе… Сейчас заменил 2 винта м4 на м3, выигрыш 4 грамма.
вообще посадить на заклепки 3мм.
У меня складная конструкция, лучи можно из Х выпрямить в Н, коптер займет меньше места. Заклепки этого не обеспечат. Опять же с винтами легче замена поврежденных лучей.
Можно было не ставить 3д печатную защиту на моторы, не усиливать профиль внутри 3д печатными вставками, выпилить внутреннюю часть пластин. Собирать на м3. Итого получилось бы 100-150 грамм экономии, минута-полторы полета. Вероятно для первой пробной рамы оно того и не стоит.
Регуляторы тоже в два раза более лёгкие.
Регули (как и полетник) уже неликвид и они просто есть (не выбрасывать же, пусть летают), более легкие я на гоночный коптер поставлю/поставил 😃. По сравнению с пчелами 30А, примерно 7 грамм разницы на регуль, итого около 30 грамм.
Приёмник заменить на нормальный, раза в три меньше весит.
Приемник тоже из того что было, все более легкое живет на гоночном коптере.
По лучам-болтам выше отписал уже.
За советы конечно спасибо. Если соберусь пилить ещё раз большой коптер, сделаю легче/лучше. И уже основываясь в том числе на своем опыте.
Здравствуйте, уважаемые.
Переделываю гексу на квадрик.

И вот вопрос: насколько критично близкое расположение края пропеллера к деталям рамы? Сейчас поставил 13" пропы, там остаётся порядка 28мм.

Всякие завихрения воздуха об раму дадут тряску? Нужно ли удлиннять лучи? Я хочу минимизировать размер коптера, это понятно, но если он начнёт трястись , или ешё будут какие неприятные последствия, будет неприятно.
И вот вопрос: насколько критично близкое расположение края пропеллера к деталям рамы? Сейчас поставил 13" пропы, там остаётся порядка 28мм.
Я делал около сантиметра. Тут нужно ориентироваться на подвес, по нему будет воздух бить, если мешать подвесу не будет - проблемы не вижу.
Сегодня в полете выпал из ремешка аккумулятор и отцепился от разъема. Летал по фпв.
Коптер упал на землю метров с 10-15, верхняя и нижняя пластины погнулись, минус 3 пропеллера.
Лучи выжили.
Пластины молотком поправил, подровнял.
Батарейка так и не нашлась.