ArduCopter Mega: порт на обычную Arduino (тестим)

Подскажите что нужно изменить, в прошивке, еще кроме как в APM_Config.h
поменять с
#define FRAME_ORIENTATION X_FRAME
на
#define FRAME_ORIENTATION PLUS_FRAME
чтобы перейти на конфигурацию “+” ?
Пришла рама DJI 450 Frame, а на нее black vortex ,без переделки возможно поставить только в “+”.
Пробовал прошивки MegaPirateNG_2.0.49_BV_GPS_OK и MegaPirateNG_2.4.1, на обеих идет сильный расколбас. Но если присмотреться к квадрику то он пытается лететь в конфигурации “Х”. Моторы подключены согласно 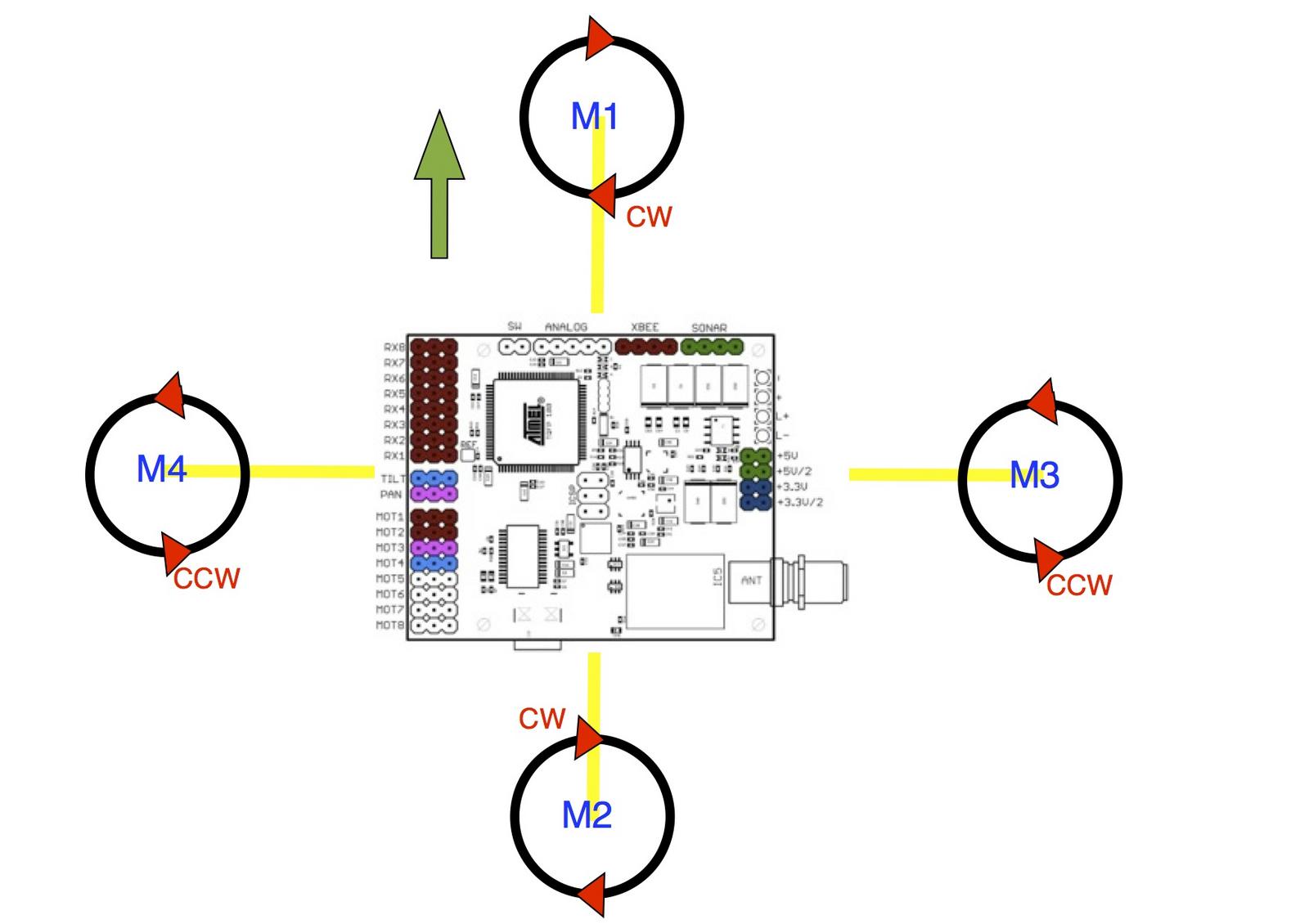
У меня бывало наоборот - выставлено X_FRAME, а судя по тяге, когда его держишь в руке, кажется что конфиг + 😃
По идее, достаточно FRAME_ORIENTATION определить, ну и в setup-frame проверить, если есть сомнения.
Уважаемый Sir Alex, подскажите пожалуйста!
Летаю на россыпе датчиков (BMA180, ITG3200……), короче тот же Allinone. До прошивки 2.3 менял адреса в библиотеке \libraries\AP_ADC \AP_ADC_ADS7844.cpp
на те, которые нужны мне, это BMA180_ADDRESS–>0x80 и ITG3200_ADDRESS–>0XD2.
А сейчас не могу найти где это можно сделать.
(два комплекта датчиков , купил в свое время когда был в Китае, а вот позже появился Allinone, и я пожадничал…)
Подскажите пожалуйста!
а в MegaPirateNG_2.4.1 ublox по i2c убрали? если раскомментировать GPS_PROTOCOL_UBLOX_I2C в APM_Config.h ошибочка вылазит.
так как в libraries\AP_GPS\AP_GPS.h закомментировали //#include “AP_GPS_Ublox_i2c.h”
и вообще GPS_Ublox_i2c_test.pde закинули в \libraries\AP_GPS\examples\GPS_Ublox_i2c_test\ а не
ткните носом где я торможу? у меня плата датчиков allinoneII ардуинка 1280
а в MegaPirateNG_2.4.1 ublox по i2c убрали? если раскомментировать GPS_PROTOCOL_UBLOX_I2C в APM_Config.h ошибочка вылазит. так как в libraries\AP_GPS\AP_GPS.h закомментировали //#include “AP_GPS_Ublox_i2c.h” и вообще GPS_Ublox_i2c_test.pde закинули в \libraries\AP_GPS\examples\GPS_Ublox_i2c_test\ а не ткните носом где я торможу? у меня плата датчиков allinoneII ардуинка 1280
Да, я убрал, т.к. у меня нет такого GPS и тестировать мне не на чем, а библиотека i2c изменилась. Подключайте его через Serial порт RX2,TX2.
Вчера взял осциллограф поюзать и вот что я обнаружил:
- Рабочий цикл в MPNG около 170Hz (Судя по импульсам InstantPWM на моторах).
- Стандартный приемник от Турниги, перестает выдавать сигнал, при потере связи (я думал что значения остаются на месте, а оказалось это код себя так ведет). Планирую Фэйлсейв восстановить.
По горячим следам выпустил новую прошивку 2.4.1 R2 В ней я добавил правку в коде InstantPWM от Олега (Syberian), вроде как должно убрать дерганье PWM сигнала (хотя я не заметил особой разницы на осциллографе). Так же теперь работает FastPWM 400Hz (точнее частоту можно задать в Планере, параметр RC_SPEED) (По умолчанию остался InstantPWM). Ну и после долгих баданий, я таки вроде бы поправил работу своего GPS с протоколом MTK16 (бинарный протокол).
Кстати, я себе еще заказал новые радиомодули FrSky. У них есть CPPM выход (PPM SUM) который у нас плохо работает, так что скоро будет его поддержка.
P.S. Тут команда АС вовсю допиливает новые фичи. Из того что приглянулось: Будет автонастройка магнитного склонения по GPS в момент получения 3D Fix’a (если GPS нету, можно будет по старинке указать в планере). Так же встраивают поддержку Кватерионов (Quaternions), я так понимаю вместо DCM алгоритма (по оба варианта присутствуют в коде)
Вчера проапгрейдил MPNG до актуального состояния AC. Выпустил тестовый билд 2.4.2 R1. Но это промежуточный релиз, т.к. на днях ожидается выход AC 2.5
В 2.4.2, основной цикл переехал на 100Гц, теперь я даже не знаю, нужен ли InstantPWM, может лучше включить обычный PWM например на 200Гц по умолчанию? Как думаете, обычные регули (не 400Гц), какую частоту нормально переваривают?
Еще попробовал включить Кватерионы вместо DCM. С большего что то работает, но все показатели (Pitch,Roll,Yaw) дергаются, прямо в планере видно как горизонт подергивается. Плюс при наклоне, уплывает Yaw (видимо нет или не работает компенсация), короче, пока не работает алгоритм.
Добрый день всем.
Хочу поделиться опытом реализации failsafe на HK TR6A V2.
На приемнике канал BAT имеет 2.9В при наличии связи и 3.3В при отсутствии.
Канал ВАТ подключил к A7.
Код модуля usercode (в примере ACRO mode потому что без GPS)
void userhook_50Hz()
{
// put your 50Hz code here
int val2 = 0;
long valm = 0;
valm == 0;
for (int i=0; i <= 100; i++)
{
val2 = analogRead(A7);
valm = valm + val2;
}
valm = valm / 100;
if (valm > 680)
{
set_mode(ACRO);
//do_ACRO();
}
}
Извиняюсь за повтор, хочу уточнить: этот приемник поддерживает ppm_sum?
Да, а вот 8 канальный - нет.
На поверку выяснилось, что ppm сигнала на bat разъеме нет. СС его не обнаружил; за неимением осциллографа (в пути) взял наушники, треска нет.
Хочу поделиться опытом реализации failsafe на HK TR6A V2.
На приемнике канал BAT имеет 2.9В при наличии связи и 3.3В при отсутствии.
А разве нельзя взять отвод от светодиода, ведь он то однозначно показывает, есть прием от передатчика или нет?
На поверку выяснилось, что ppm сигнала на bat разъеме нет. СС его не обнаружил; за неимением осциллографа (в пути) взял наушники, треска нет.
Где то тут уже писали, что в новой прошивке этого приемника, уже убрали PPM.
А разве нельзя взять отвод от светодиода, ведь он то однозначно показывает, есть прием от передатчика или нет?
Да не нужно это все. Приемник просто перестает выдавать сигнал по всем линиям. Это легко определить, как нибудь я это реализую в пирате.
На поверку выяснилось, что ppm сигнала на bat разъеме нет. СС его не обнаружил; за неимением осциллографа (в пути) взял наушники, треска нет.
А разве нельзя взять отвод от светодиода, ведь он то однозначно показывает, есть прием от передатчика или нет?
Так и собирался поступить. Разобрал - стал мерить напряжения, понял, что можно обойтись без дополнительной пайки.
Добрый день!
Подскажите, с таким набором датчиков 10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module проблем не будет?Вроде по отдельности все поддерживаются, не в Пирате так в МультиВии…
Добрый день!
Подскажите, с таким набором датчиков 10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module проблем не будет?Вроде по отдельности все поддерживаются, не в Пирате так в МультиВии…
В пирате поддерживается только HMC5883L и BMP085
В пирате поддерживается только HMC5883L и BMP085
А в Wiki написано, что поддерживается плата FreeIMU v0.4 там вроде MS5611 Baro
А в Wiki написано, что поддерживается плата FreeIMU v0.4 там вроде MS5611 Baro
имелись ввиду датчики из указанной платы.
других вариантов нету?
никто не мешает добавить поддержку других датчиков, у меня в прошлом году на L3G4200D + BMA020 летало, код довольно легко копирнуть из multiwii, только коэфициенты деления подправлять надо чтобы в GUI правильно реагировал на отклонения (тут почти методом тыка под конкретные датчики)
Может у кого то есть идея: Я тут заметил, что при подключении питания к ардуине, как правило не запускается компас и GPS. Если сделать Reset, то все датчики запускаются как положено. Вроде как времени им предостаточно чтобы выполнить инициализацию, тем не менее что то идет не так.
И еще, как временно отключить фичу “Reset при подключении USB (COM порта)”?
И еще, как временно отключить фичу “Reset при подключении USB (COM порта)”?
на сидуино есть переключатель M/A - он вроде как отрубает возможность резета
Если сделать Reset, то все датчики запускаются как положено.
как вариант - при холодном старте (хз как его распознать, но может как раз по датчикам) делать reset
Наконец-то пришла мне All in one! Так получилось, что три месяца пришлось ждать! На плате есть перемычки, подскажите, как с ними обращаться? И еще: MS5611 поддерживается? И где взять распиновку или даташит?
И еще: MS5611 поддерживается?
Поддерживается, но с датчиками FreeIMU 0.4.1, В теории и на AllInOne должен работать, но я не могу проверить.