А давайте обсудим Arducopter - APM

что можно предпринять?
Ориентацию проверить.
Всем привет, и у меня проблема с компасом.
Собираю очередной коптер на очередном миниАПМ.
Контроллер с Бангуда
Прошивка 3.1.5
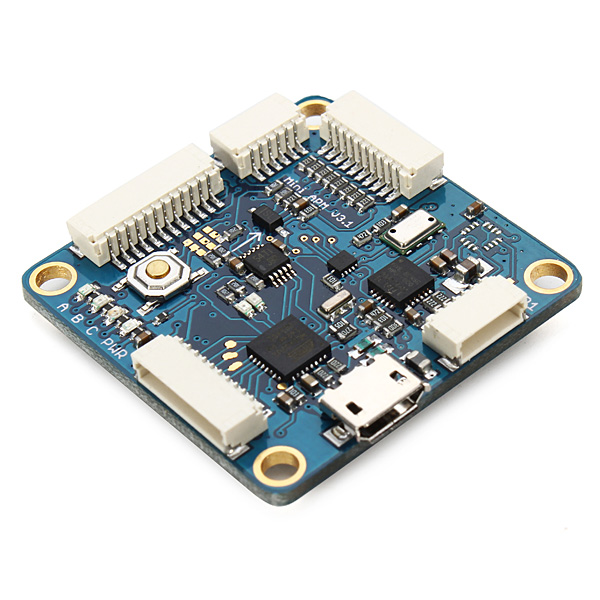
Как видно, и как заявлено контроллер без встроенного компаса. По крайней мере на плате пусто.
Но в МП коптер крутится-наклоняется-поворачивается согласно поворотам в руках.
А проблема собсно с подключением внешнего компаса. Или даже в том, что вообще никакой не работает и не воспринимается.
Компас подключаю такой, в составе GPS

Т.к. миниАПМ выдает только 5В для питания GPS и компаса, то сделал такой мод
Теперь компас питается от 3.3В, на контактах SDA и SCL тоже такое же напряжение.
Но в МП все равно Bad Compass Health, в данных по ax, ay,az и gx, gy, gz координаты есть и меняются, а вот mx, my, mz и magfield - все по нулям.
В калибровку компаса заходит, картинка с осями появляется, но ничего не шевелится. Ни от какого компаса.
Переключение внешний/внутренний пробовал неоднократно.
Прошивки пробовал 3.1.5, 3.2, 3.1.2
Провода прозванивал и местами менял тоже неоднократно. Сигнал на контактах SDA и SCL с компаса на контроллер доходит.
Пробовал подключил заведомо рабочий компас, предварительно проверив его на большом АПМ - все то же самое, т.е. не фурычит.
Терминал выдает compass initialisation failed.
Куда уж дальше копать?
то сделал такой мод
А “земля” у компаса и GPS общая?
Куда уж дальше копать?
неплохо бы было на реальное фото посмотреть. Перемычку JP1 перерезал? Если компас не запаян влиять вроде не должно, а вдруг? В настройка мишин планнер внешний компас выбрал? SDA и SCL не перепутал? У меня точно такая беда была но внешний компас заработал в итоге.
В настройка мишин планнер внешний компас выбрал?
Не обязательно. Все зависит от ориентации. Но он до этого пункта не дошел…
Подскажите, как правильно прописать настройки для несимметричных рам (TBS Discovery)
Говорят, можно поставить конфиг V-рама, но на практике, поговаривают, отличий в полёте от X - нет. Кто что скажет?
Что-то ещё где то прописывать?
Не нравится поведение текущее при X конфигурации (с Питч ожидаемо всё ОК, а при маневрах с Roll - затрагивается Питч ) Как с этим бороться?
А “земля” у компаса и GPS общая?
Да, земля у них общая, на фото земля GPS крайний контакт справа, земля компаса - крайний слева.
Пока писал тот опус хотел упомянуть, но забыл. Перемычку конечно же перерезал.
SDA и SCL менял местами неоднократно.
От разъема компаса, до микросхемы питание доходит.
Что-то мне кажется тут какая-то лажа в полетном контроллере. Почему микросхемы компаса нет, а по сторонам света в МП он вращается?
Контроллер и компас у меня находятся в разных независимых частях корпуса, поэтому перепутать невозможно.
Почему микросхемы компаса нет, а по сторонам света в МП он вращается?
apmcopter.ru/…/ya-poluchil-kontroller-chto-dalshe.…
3й камент. Учитывается так же и отклонение по гироакселю для компенсации.
Это нормально.
Потому, что показания компаса это совокупность компас+гиро.
Так, есть компас или нет в планнере будет чего то меняться.
Сам компас смотреть в статусе параметры MXMYMZ
Где можно поискать настройку Спектрум DX8 под АПМ? (5 канал, запутался с миксами)
Да, земля у них общая, на фото земля GPS крайний контакт справа, земля компаса - крайний слева.
мда, все верно. Остается вариант что китайцы где-то соплю повесили, культура производства не особо, вызванивать дорожки… Хотя схемы нет, но схема 2.5.2 на 90% совпадает
Кстати, здесь собраны картинки с правильной распиновкой, чтобы SDA и SCL не угадывать www.rcgroups.com/forums/showthread.php?t=2182722
Где можно поискать настройку Спектрум DX8 под АПМ? (5 канал, запутался с миксами)
copter.ardupilot.com/wiki/common-six-modes/
diydrones.com/…/spectrum-dx8-2-switches-1-tx-chann…
apmcopter.ru/apm/apm-setup/ya...to-dalshe.html 3й камент. Учитывается так же и отклонение по гироакселю для компенсации. Это нормально.
Включаю окно с сенсорами. Оставляю галки только на акселях. Кладу коптер, к примеру на правый бок. Стрелка ROLL отклоняется ровно на 90 градусов, и там и остается. А по инструкции должна возвращаться.
Компас (тот который типа внутренний) тестирую так:
ставлю коптер ровно, носом на север (по МП). Отрубаю питание, разворачиваю его на 180 градусов, т.е. носом на юг, подключаюсь в МП - и о чудо, он развернулся носом на юг в МП. Когда я отключаю питание, аксели и гироскоп не могут же знать, что я двигаю коптер? Значит какой-то таинственный компас есть.
Сам компас смотреть в статусе параметры MXMYMZ
Как уже писал выше, эти значения по нулям. 😦
А еще в окне калибровки компаса, он мне говорит про какие-то 2 компаса эрор
Если по нолям значит компас не робит.
Не надо выдумывать всякие фокусы как наипать контроллер.
В параметрах четко должно показывать значения компаса по трем осям.
Если по нолям значит компас не робит. Не надо выдумывать всякие фокусы как наипать контроллер. В параметрах четко должно показывать значения компаса по трем осям.
Говорю же, подключал другой модуль, точно рабочий, перед этим проверил его на большом АПМе.
Полетал седня в лоитере с ГПС Алексея. вдруг как рванет абы куда-- посмотрел лог: количество спутников в этот момент упало до1 шт. Я задавалл параметр мин число спутников для использ ГПС -8 . Почему от краткой потери сигнала он летит абы куда? как бороться? И как уменьшить скорость удержания позиции–шоб помедленней валил куда не следует?
Паршивка 3.1.5
как бороться?
FS был настроен?
количество спутников в этот момент упало до1 шт
а можно попросить логи, очень интересная ситуация.
в коптере реализована инерциалка. имхо в случае если спутников становится меньше чем указано жпс перестает использоваться и автопилот начинает прогнозировать свою позицию исходя из последней известной скорости и ускорений.
ускорения берет от акселя, если вибрации на раме сильные - может сильно ошибиться.
стврые прошивки имеют меньшее влияние инерциалки на прогноз позиции
например в 2.9 - инерциалка по широте и долготе не реализована - только по высоте.
аппарат пока не окончательный, повесил для испытания. фото сделаю если нужно.
фото сделаю если нужно
да, нужно падает число спутников, так бывает когда вблизи жпс источник помех.
втч интересно какое оборудование установлено на аппарате и где конкретно установлено (камеры, регистраторы, передатчики итд)
Рядом был повер модуль для апм, разводка питания подальше-- внизу под корпусом рамы, акб там же, в нижней точке. камеры и передатчика видео не стояло–спецом снял. рядом сам апм . на почту фото скину.