А давайте обсудим Arducopter - APM

Стабилизацию можно оставить, стабилизация корректирует болтание коптера (в определенных пределах) и управлению не мешает
Стабилизацию можно оставить, стабилизация корректирует болтание коптера (в определенных пределах) и управлению не мешает
Зачем, если у подвеса свой процессор и свои датчики?
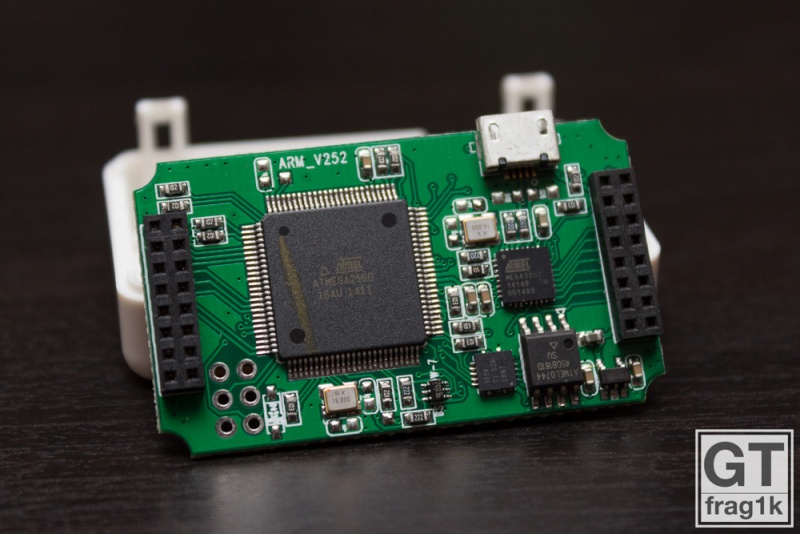
подскажите ! контроллер вот такой
разъёмы вот
Куда мне подключить APM Power Module
Не похож он на АРМ. Можно ссылку, откуда прибыл? По внешнему виду это плата с датчиками.
Сайт ardupilot.com у всех не резолвится?
Не похож он на АРМ. Можно ссылку, откуда прибыл? По внешнему виду это плата с датчиками.
Это скорее всего от Валькеры мозги. Угадал? 😉
Клон АПМ кастрированный.
Подключать надо на ноги процессора ИМХО.
Лучше спросить в теме Валькеры 350 (если это от нее мозги)
Это скорее всего от Валькеры мозги. Подключать надо на ноги процессора ИМХО.
Это мозги от
cheerson cx-20 www.ebay.com/itm/221732542128
Дело в том, что я не вижу на фото мозг. Аксель, баро и компас есть, мозга нету. Может есть еще одна плата в коробочке?
Посмотрел multicopterwiki.ru/index.php/Файл:IMG_4366.jpg - похоже, действительно на процессор.
Это мозги от
cheerson cx-20 www.ebay.com/itm/221732542128
Ну там и спросите. Тема есть. Быстрее ответят.
Может есть еще одна плата в коробочке?
Там 2 платы. Сам контроллер на внутренней стороне.
Подключать надо на ноги процессора ИМХО.
А по другому никак ? А то тз меня пайщик некудышный !
А по другому никак ? А то тз меня пайщик некудышный !
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Из той темы меня народ посылают сюда !
Из той темы меня народ посылают сюда !
У вас не совсем АПМ, точнее он обрезан. Тут обсуждается полноценный АПМ. Вряд ли кто ответит. Хотя чем черт не шутит…
Скорее всего на ноги сразу паяться надо, порта для ПМ нет.
Спасибо будем ждать !
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
понял!
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
Так как полётный контроллер является ни чем иным как ArduPilot Mega, то доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner, например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M - практически всё актуально и для Cheerson CX-20. Также возможно подключение телеметрии и OSD
Было-бы странным при наличии телеметрии отсутствие OSD …
Добрый день! Вчера обновился до прошивки 3.2.1 на apm 2.6. Выполнил полную настройку с нуля. На 7 канал поставил ResetToArmedYAW. Так вот проблема, не работает теперь эта функция. Думал глюк какой, чистил память, перепрошивал и настраивал заново. Не работает.
Вопрос, это у меня только такая проблема, кто еще с этим сталкивался?
Так как полётный контроллер является ни чем иным как ArduPilot Mega, то доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner, например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M - практически всё актуально и для Cheerson CX-20. Также возможно подключение телеметрии и OSD
Было-бы странным при наличии телеметрии отсутствие OSD …
Угу, только выводы для подключения всего нужного не предусмотрены. “В принципе возможно” - только надо доработать напильником.
На 7 канал поставил ResetToArmedYAW. Так вот проблема, не работает теперь эта функция.
Ну как вариант можно летать всуперсимпле 😃
Ну как вариант можно летать всуперсимпле 😃
Да, я так и делаю. Только использую симплмоде, а не суперсимпл. Интересно узнать, как работает или не работает эта функция у других. Как лечить?
Вот так кстати оборудовал автопилот по схеме Алексея Козина


