А давайте обсудим Arducopter - APM

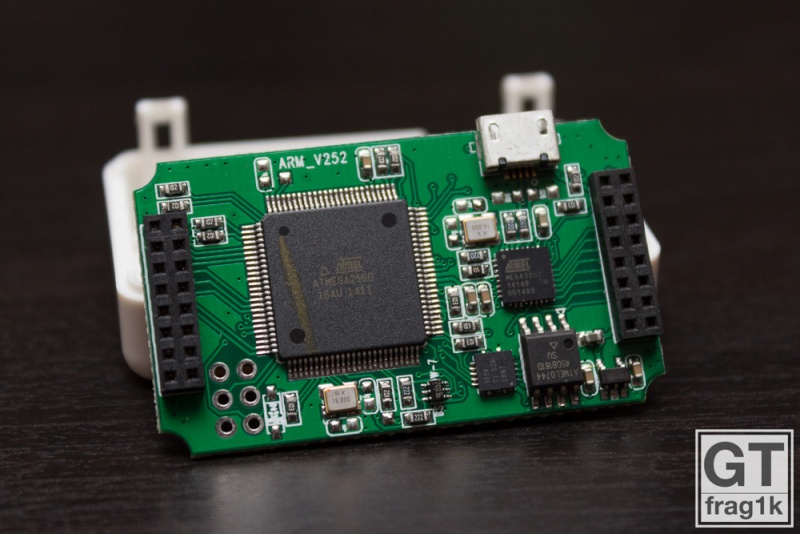
Дело в том, что я не вижу на фото мозг. Аксель, баро и компас есть, мозга нету. Может есть еще одна плата в коробочке?
Посмотрел multicopterwiki.ru/index.php/Файл:IMG_4366.jpg - похоже, действительно на процессор.
Это мозги от
cheerson cx-20 www.ebay.com/itm/221732542128
Ну там и спросите. Тема есть. Быстрее ответят.
Может есть еще одна плата в коробочке?
Там 2 платы. Сам контроллер на внутренней стороне.
Подключать надо на ноги процессора ИМХО.
А по другому никак ? А то тз меня пайщик некудышный !
А по другому никак ? А то тз меня пайщик некудышный !
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Из той темы меня народ посылают сюда !
Из той темы меня народ посылают сюда !
У вас не совсем АПМ, точнее он обрезан. Тут обсуждается полноценный АПМ. Вряд ли кто ответит. Хотя чем черт не шутит…
Скорее всего на ноги сразу паяться надо, порта для ПМ нет.
Спасибо будем ждать !
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
понял!
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
Так как полётный контроллер является ни чем иным как ArduPilot Mega, то доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner, например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M - практически всё актуально и для Cheerson CX-20. Также возможно подключение телеметрии и OSD
Было-бы странным при наличии телеметрии отсутствие OSD …
Добрый день! Вчера обновился до прошивки 3.2.1 на apm 2.6. Выполнил полную настройку с нуля. На 7 канал поставил ResetToArmedYAW. Так вот проблема, не работает теперь эта функция. Думал глюк какой, чистил память, перепрошивал и настраивал заново. Не работает.
Вопрос, это у меня только такая проблема, кто еще с этим сталкивался?
Так как полётный контроллер является ни чем иным как ArduPilot Mega, то доступны все богатые возможности этого контроллера при подключении его через USB к компьютеру с установленной на ней программой MissionPlanner, например, полёт по точкам. Смотрите по аналогии использование контроллера DEVO-M - практически всё актуально и для Cheerson CX-20. Также возможно подключение телеметрии и OSD
Было-бы странным при наличии телеметрии отсутствие OSD …
Угу, только выводы для подключения всего нужного не предусмотрены. “В принципе возможно” - только надо доработать напильником.
На 7 канал поставил ResetToArmedYAW. Так вот проблема, не работает теперь эта функция.
Ну как вариант можно летать всуперсимпле 😃
Ну как вариант можно летать всуперсимпле 😃
Да, я так и делаю. Только использую симплмоде, а не суперсимпл. Интересно узнать, как работает или не работает эта функция у других. Как лечить?
Вот так кстати оборудовал автопилот по схеме Алексея Козина



помогите по апм 2.5.2
работала нормально перепрошил ппм энкодер, gps.
Миссион планер не видит апм.
на апме горит одна лампочка, при нажатии кнопки конект выдаёт ошибку
Посмотрите раздел настроек BATT_ Parameters
plane.ardupilot.com/wiki/arduplane-parameters/#bat…
в полном списке параметров в мишн планере. Там есть объяснение на какие аналоговые выходы A0-A13 цеплять датчик тока и вольтажа, лишь бы были свободные )
По идее ведь в тех настройках можно настроить подключение второго повермодуля, хоть и нет непосредственно коннектора под второй на плате. А в Вашем случае нужно будет коннектор перепаять или провода напрямую к повермодулю припаять.
Ребят, подскажите пожалуйста:
Кто подключать к АПМ внешний барометр? Поделитесь опытом, плиз 😃
У меня проблема, крайне не адекватно ведет себя коптер в режиме альт.холд. Если тихонько не дрыгаться, то еще норм, а если полететь вперед, набирает высоту очень шустро.
Нет, баро хорошо закрыт поролоном. А бывает, что при висении может тупо вниз начать лететь (при этом ветра, почти, нет). Вибрации в пределах нормы, плюс я угрубил фильтр до 10Гц (с этим значением нормально у меня раньше летало).
Грешу на дохлый барометр. Хотя, плата новая, фирменная от 3DR.
Должен по идее в планнере на плохую жизнь барометра жаловаться и и баро глич появляться периодически, к апм врятли без бубна программерского можно подключить…
есть у меня один барометр при старте платы выдаёт цыфры непомерные ±200метров с ним не армится даже, но стоит подождать минуту-две высота придёт в адекватные значения и всё можно летать смело… в альтхолде главный аксель, я ловил баро глич в альтхолде - даже не шелохнулся только пропищал…
Всем привет. Не знаю, может уже было…но:
Можно ли одновременно вешать на порт телеметрии связку модем+minimOSD+конвертер на базе teensy 3.1 для FrSky x8r ресивера?
Чтобы получить телеметрию одновременно в любом из девайсов.
Понятное дело что связка из модема и OSD работает из коробки, интересует будет ли третий девайс с ними уживаться?
Кто знает, при настройке положения компаса по яву, нужно двигаться по часовой стрелке, или против? 😃