А давайте обсудим Arducopter - APM

Точную цифру назовите пожалуйста. Потом поделите на количество проданных плат и какой процент получится?
точную цифру не назову, но за десяток.
А про процент - наверняка существенно ниже, чем процент от 3др
Он может “портить” сигнал с аппы?
Вполне может. Перегружается входной тракт, на входе врядли стоят серьезные фильтры, или приемник имеет огромный динамический диапазон. Могу посоветовать антенны приемника поставить на передние лучи под углом 45* в разные стороны, и видеопередатчик выставить сзади антенной вниз.
но многие англоговорящие люди произносят это слово как ХОК
Тогда уж ХОУК, w проглатывается и произносится как у.
Цена на пикс без OF стоит такая же как на назу 2, вполне конкуретное предложение, и то и то будет отлично летать на рекомендованных производителем комплектующих. В пиксе больше функционал и гибкость, наза более дружелюбна к пользователю, каждый выбирает что ему нужно. Китайские клоны и разработки, большей частью, имеют низкое качество и ошибки, отрицать это глупо. Зачем все в кучу валить, вы уже определитесь, что хотите всем сказать? Что апмоклон сложнее заставить работать и настроить чем назу? Это и так очевидно.
Мальчики, не ссорьтесь 😃
Лучше подскажите, почему при ошибках компаса коптер улетает в терновник. При переключении в RTL, коптер боком, боком с набором сокрости и потерей высоты ушел в кусты. Хорошо еще что он три коптер со складывающимися лучами. И чем чревато отключение EKF?
Логи тут.
Наза имеет весь необходимый функционал для отличных полетов, и даже сьемки видео.
Для “летающего штатива” взял Назу, не хватает облета точки, не настроить высоту возврата при потери связи, что чревато крашем.
АРМ интереснее.
Ребя, подскажите гружу лог, а уровня вибрации нет(
джпс, напряжение есть и т.д. а вибрация прямая полоса(
Летал минут 18 при чем, три раза подряд а АПМ лог один, последний, наверное из за объема памяти?
Как-то он странно себя ведет реж. лоитер.
Сейчас кину видео.
Может криво сделана калибровка компаса. Завтра попробую сделать заново.
Делал дома, т.к. нет возможности включить её на ул. (
Как-то он странно себя ведет реж. лоитер
а в чем странность?
Поискал по ветке, такой проблемы не нашел.
Обновился Mission Planer до 1.3.31 build 1.1.5696.33420.
Теперь в разделе Flight Modes (Initial Setup -> Mandatory Hardware -> Flight Modes) в выпадающих списках нет ничего
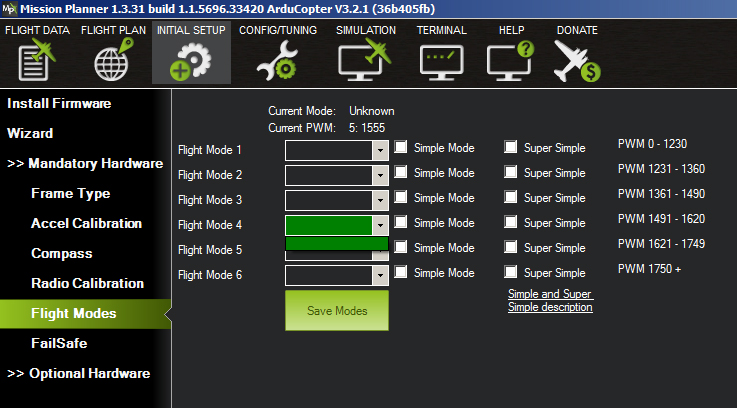
Что то сломалось? Как мне быть?! Помогите!
а в чем странность?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
Неделю назад такого не было, стоял как “конь” вкопанный)). Разобрал, собрал и он начал исполнять. Не критично конечно.
Но перфекционизм диктует правила)
Ах да, винты на апц 10х55 поменял, стоял пластик китай.
В принципе тут все китай) мадэн ин аллиэкспресс. ))
Может подпольное с заводским дружить не хочет? )
Что то сломалось? Как мне быть?! Помогите!
Попробуйте обновится еще раз.
Сброс настроек на апм, рэссет …
Если не поможет, откатите версию летайте на старой!
А на счет китай клонов это как повезет.
У меня все сборка апм с алли. Летает не плохо, как мне кажется.
Только стаб сдох на 3.3в. Поменял, ничего сложного, летает дальше.
(Завтра должна придти посылка с FPV от туда же, народ не жалуется, посмотрим. )
RTL отрабатывает на раз. Хочу заметить, rtl плохо работает когда оч. криво настроен компас. Джпс сразу не верно определят точку взлета, от-туда все вытекающие праблы.
Я всегда после взлета проверяю, метрах пяти от земли режим лоитер, если стоит там где должен уверен что RTL отработает.
Народ! Сегодня вернул дефолтные (что были изначально подобраны) пиды ( rcopen.com/forum/f123/topic233564/20772 ) и потестил. Коптер стал намного отзывчивее. Но есть и странность. В РТЛ летишь домой против ветра либо при боковом ветре, переключаешься в альт холд - коптер резко “клюёт” в сторону, противоположную дому, затем сразу выравнивается. Не всегда, но бывает. До 44* наклонялся сегодня. А иногда просто выравнивается и всё. В чём проблема?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжки
джпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него
У Вас модуль запаян в пленку? Напряжение 5,1-5,15 В. Хорошо, но можно сделать 5,0. Если все закрыто, то можно оставить.
Да, модуль запаян, он именно таким вольтажом и подписан. Надеюсь, это превышение не критично, пока не буду переделывать.
Что бросилось в глаза.
Резкий провал напряжения на регули при увеличении газа. Это может быть связано с тонким проводом от батареи или плохим контактом в разъеме.
Да, проводочки не толстые. Коннекторы видимо, не самые лучшие поставил, все батареи перевел на Т-разъемы. Смотрю тут народ в основном желтыми пользуется. Подскажите, какие лучше?
Кстати, полетал недавно, все четко, без закидонов. Появилась какая-то стабильность и надежность. Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные, но я грешил на ветер или необходимость еще раз откалибровать аксель и компас на улице (квадр летал не строго по осям у меня).
Как переделаю провода, и возможно, коннекторы - кину отчет в виде лога.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжкиджпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него
)))
Имеет место быть)
По вибрациям, движки скаи оригиналы дали хороший результат. за 0.3 не выскакивает YX . Дома взлетал правда). С улицы принес, лог вибрации не показывает.(( глюк какой то, завтра еще попробую.
Думаю пот под моторки прокладки подложить, если вибрации будут.
В общем, методом проб и ошибок думаю сделается, все)
Может здесь кто подскажет.
Появился люфт в одном движке, как практика показала, продольный.
Как убирается инфу не нашел, пришлось немного согнуть дюралевую шайбу под стопорным кольцом. Люфт со стуком прошел. Есть другие способы? ) Нужно подложить что то в толщину 0.1 - 0.2 мм. А что именно так и не придумал. (
Что то сломалось? Как мне быть?! Помогите!
Поставьте МП 1.3.28.
Подскажите, какие лучше?
Обычно делается в соответствии с максимальным током.
И еще общее правило, меньше длина провода - меньше сопротивление провода.
Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные
Если почти незаметные, то оставьте как есть.
Не устраивает, тогда калибруйте компас. И проверяйте по сторонам света
Про никому не нужный функционал мне хватит рассказывать. Ладно?
Хорошо, Вам не буду.
Это всем остальным.
Показал видео, снятое в режиме FollowMe, знакомым горнолыжным инструкторам.
Мгновенная реакция - Хочу!
Понятно, что там не всё так просто, но ребята маются с фантомом, а тут сбыча мечты.
Если “Сбыча” , то да
Вообще, режим очень интересный, но, к сожалению, не вполне документированный.
В частности, я так и не понял, сопровождает ли аппарат цель по вертикали (на что очень надеются горнолыжники), или только по плоскости.
Нашёл две программы для Андроида, Tower и DroidPlanner, как я понял, это один проект, но проги очень разные.
Реально у меня заработал только Tower, хотя и заговорил как раз в стиле радетелей чистоты английского языка (конекцион лост и т.д.)
На ближайших выходных планирую поковыряться подробнее.
Вот ещё что нужно отметить: программа плюс модем жрут батарейку Андроида прям-таки без хлеба. Самсунг Нот 2 садится за час на 50%.
Вообще, режим очень интересный, но, к сожалению, не вполне документированный.
В частности, я так и не понял, сопровождает ли аппарат цель по вертикали (на что очень надеются горнолыжники), или только по плоскости.
Нашёл две программы для Андроида, Tower и DroidPlanner, как я понял, это один проект, но проги очень разные.
Реально у меня заработал только Tower, хотя и заговорил как раз в стиле радетелей чистоты английского языка (конекцион лост и т.д.)
На ближайших выходных планирую поковыряться подробнее.
Вот ещё что нужно отметить: программа плюс модем жрут батарейку Андроида прям-таки без хлеба. Самсунг Нот 2 садится за час на 50%.
Нет, только по горизонтали. Можно загрузить карту высот и он будет следовать. Кстати, теоретически там есть расстояние по высоте от точки, но как работает - не знаю
Нет, только по горизонтали
А если сонар с PX4Flow подоткнуть? Или с Андроида высота не передаётся?
А если сонар с PX4Flow подоткнуть? Или с Андроида высота не передаётся?
ВРоде можно подключить карту высот.
А высота с Андроида передается, но вопрос расстояние от объекта - для гор не оч хорошо, они разной формы и угла…бывают очень крутые перепады.
Спасибо, мне это совершенно не нужно. Даже вредно.
Я катаюсь на кайте, мне этот режим никак не поможет.А почему вы всем видео не покажете? Лучше же увидеть один раз, чем много раз написать.
Мое видео не могу дать, по тому, что воюю с двумя коптерами с гпс режимом. Вот не пойму что не так и все.
Третий коптер не имеет телеметрии еще - в пути
ну и что понту от этого фоллоу ми? Картинка что ли клевая? Пульт оператора все равно этот фолоуми не запомнит. Пока только не будет передаваться высота с цели (вешать на цель второй АПМ с телеметрией?) и всякими датчиками (вот смеху то будет когда ты проедешь под проводами в коптер в них впилится)
Все это пока что больше игрушка и маркетинг. Вот недавно я погонял в режиме дрифт. Вот это да прикольно. И наза этого не умеет.
Единственный режим который мне еще понравился - circle. Руками я не могу стабильно сделать круг. А мозги сами могут. Вот только это надо сначала подключаться по телеметрии, задавать радиус, выводить коптер на этот радиус и запускать circle.
Пока только не будет передаваться высота с цели (вешать на цель второй АПМ с телеметрией?) и всякими датчиками (вот смеху то будет когда ты проедешь под проводами в коптер в них впилится)
а одной телеметрии мало?зачем на цель апм вешать?
А не попадать под провода - вообще не проблема.