А давайте обсудим Arducopter - APM

Не берите 4-й фантом. Тем более 3-й.
Сейчас вполне можно за ваш бюджет взять мавик про первый

Не хотелось бы превышать бюджет.
Ну как бы я до нового года продал практически новый аир за 37, чтобы взять M2Pro.
На вторичке сейчас дофига первых мавиков, это отличный проверенный временем аппарат.
Главное выбрать хороший экземпляр.

Спасибо всем за ответы
Не берите 4-й фантом. Тем более 3-й.
Сейчас вполне можно за ваш бюджет взять мавик про первый
Благодарю за совет. Не думал что его можно найти за эти деньги. Есть шанс что он живой?
Спасибо всем за ответы
Благодарю за совет. Не думал что его можно найти за эти деньги. Есть шанс что он живой?
А что с ним будет? Если он дохлый сразу будет видно. Нормальная проверка все покажет. При условии что вживую конечно.

Необходимо зарядить батарею фантома PH3-4480-15.2. Штатной зарядки нет. Имеется ли возможность использовать стороннюю зарядку. Фантома никогда не имел.

Имеется ли возможность использовать стороннюю зарядку. Фантома никогда не имел.
подключаете к любому заряднику, выставляете настройки, включаете батарею, включаете заряд, радуетесь.
полярность не перепутайте
разобрался

Приобрёл Mavic Platinum на попробовать, и появилось у “чайника” пару вопросов:
- Возможно ли удалить полётные данные старого владельца? ( а то мало ли где он там летал)
- В приложении DJi GO 4 карты прогружаются онлайн, есть ли возможность закачать базу карт что бы интернет для позиционирования дрона на карте не требовался? Или загрузить нужный район в КЕШ и сохранить, пока доступ к интернету есть? ( по работе бываю в уголках России где с интернетом да и с обычной GSM связью беда)
P.S.
Прошу извинить если озвученные вопросы уже не раз обмусоленны, если ткнёте носом где посмотреть буду благодарен)
1 сами затрутся, вы ж летать собираетесь?
2 было в старых
кастомных сборках DJI GO, в каких точно не помню. на сегодняшний день такого нет
что мешает летать без карт?
мне кажется, вы изначально не верно акценты расставляете.
лучше озаботьтесь изучением правил безопасных(и для дрона и для окружающих) полетов.
что бы потом не бегать в тему крашей за моральной поддержкой своих глупостей.
мне кажется, вы изначально не верно акценты расставляете.
Акценты расставлены верно, это не первый опыт т управление подобным дроном, опыт управления есть не маленький, просто более дешёвой китайской моделью, а именно X380, а он поверьте мне, ведёт себя менее стабильно чем DJi)
Тем более в районе где в основном будет использоваться дрон, навредить можно только дикой природе, а она раздавит этого «пискуна» и не заметит.
Полёты с картой нужны для работы, что бы можно было понять от куда дрон передаёт картинку, и после выдвинутся туда пешочком.

Акценты расставлены верно, это не первый опыт т управление подобным дроном, опыт управления есть не маленький, просто более дешёвой китайской моделью, а именно X380, а он поверьте мне, ведёт себя менее стабильно чем DJi)
Тем более в районе где в основном будет использоваться дрон, навредить можно только дикой природе, а она раздавит этого «пискуна» и не заметит.
Полёты с картой нужны для работы, что бы можно было понять от куда дрон передаёт картинку, и после выдвинутся туда пешочком.
Все просто заходите в гугл карты выбираете область где планируете летать, выбираете офлайн карты загружаете , сохраняете подписываете и так по очереди каждую область которая вам нужна. Все потом дрон по GPS сам найдет себя и подтянет карты из гугл карт.

Все потом дрон по GPS сам найдет себя и подтянет карты из гугл карт.
Интересная метода…
Это Вы теоритизируете или есть подобный опыт?

Интересная метода…
Это Вы теоритизируете или есть подобный опыт?
Я не вдавался в подробности, как это работает, у меня в навигатор закачен СПб, летаю без интернета, карты грузятся сами. Был в области приходилось включать интернет.
летаю без интернета, карты грузятся сами. Был в области приходилось включать интернет.
Так у Вас карта просто скеширована, а не загружена
Так у Вас карта просто скеширована, а не загружена
Я в этом не очень силен. Когда на новый телефон ставил Яндекс Навигатор,он мне предложил загрузить карты, я загрузил то-ли Сев.Запад то-ли СПб. Теперь навигатор работает без интернета,только с GPS. Джига видимо этими картами пользуется. Был в глуши, Семиозерье хотел поснимать, так карты не грузились, спутники были. Полётал не высоко-не далеко, не стал рисковать, но кое-что заснял.
Интересная метода…
Это Вы теоритизируете или есть подобный опыт?
Я так всегда делаю когда знаю что в месте где буду летать возможно не будет интернета, соответственно карты которые мне нужны я я загружаю заблаговременно.

Всем добрый день
Товарищи форумчане подскажите в чем может быть проблема и куда копать для ее решения.
В интернете что-то ничего не могу найти (( кроме одной статьи где описано, что если замена кабелей и телефонов/планшетов не помогло, то скорее всего это проблема с USB пульта
DJI Phantom 3 Professinal был куплен с рук (не мной, начальством для работы). В комплекте была одна батарея, но родная или нет не известно. Вторая была новая куплена.
Не удается подключить ни одно устройство к пульту.
Ни iPhone 5S, ни iPhone 10 (с 7ю разными кабелями) ни планшет на Андроиде (3 кабеля) (планшет новый, был куплен специально для этого коптера). На Андроиде отладка по USB включена и назначение портов все перепробовал.
Везде программа DJO GO (и DJI Pilot) пишет что “Disconnected”.
При включении пульта и коптера они друг друга находят. Коптер управляется, камера двигается, моторчики запускаются и глушатся с пульта.
Это техническая (системная) проблема или это у меня руки-крюки?
Заранее благодарен
Везде программа DJO GO (и DJI Pilot) пишет что “Disconnected”.
Вы в аккаунте Dji зарегистрированы.Какая DJI GO и не установленно ли две на одном устройстве.В DJI GO есть пошаговая инструкция и с Андроидом проблем быть не должно.
Вы в аккаунте Dji зарегистрированы.Какая DJI GO и не установленно ли две на одном устройстве.В DJI GO есть пошаговая инструкция и с Андроидом проблем быть не должно.
Да, зарегистрирован и в приложении авторизирован.
Последнюю версию DJI GO использую, на iPhone скачанную с AppStore. На iPhone X - стоит только DJI GO (DJI Pilot удалил), на iPhone 5S стоит DJI GO и DJI Pilot.
на Андроиде с Google Play версию DJI, других приложений нет никаких.

на Андроиде с Google Play версию DJI, других приложений нет никаких.
Там есть 2 версии Го, старая до Фантома 4, т.е. нужная именно вам и новая, начиная с 4го и выше.
Если скачали последнюю, то неудивительно, что она не коннектится к Ф3. 😃
Там есть 2 версии Го, старая до Фантома 4, т.е. нужная именно вам и новая, начиная с 4го и выше.
Если скачали последнюю, то неудивительно, что она не коннектится к Ф3. 😃
Я в курсе, сначала скачал DJI GO и DJI GO 4. Но в 4й не оказалось инструкции как подключить 3й Фантом и данная 4я была удалена с телефона

А про версию Djl go 3.1.11 mod 22 есть какие нибудь отзывы, как она себя ведёт. Нет ли глюков, для ф3а, пока не нашёл внятных отзывов, я(только из-за карт) офлайн.

ребята всем привет, в этом году фонтом 4 начал писать что нужно обновит прошивку, так как для меня эта процедура страшна и обратится за помощью не к кому, то вопрос. необходимо ли обновлять и если этого не сделать то чем чревато?

то чем чревато
Ничем. Даже наоборот. Просто забейте, особенно если все устраивает.

то чем чревато
Обновление это зло.Работает нормально не мешайте технике работать.
не будите лихо
фантом 4 если летает и не глючит, то лучше прошивку самого коптера вообще не трогать. НИКОГДА…

Как-то он странно себя ведет реж. лоитер
а в чем странность?

Поискал по ветке, такой проблемы не нашел.
Обновился Mission Planer до 1.3.31 build 1.1.5696.33420.
Теперь в разделе Flight Modes (Initial Setup -> Mandatory Hardware -> Flight Modes) в выпадающих списках нет ничего
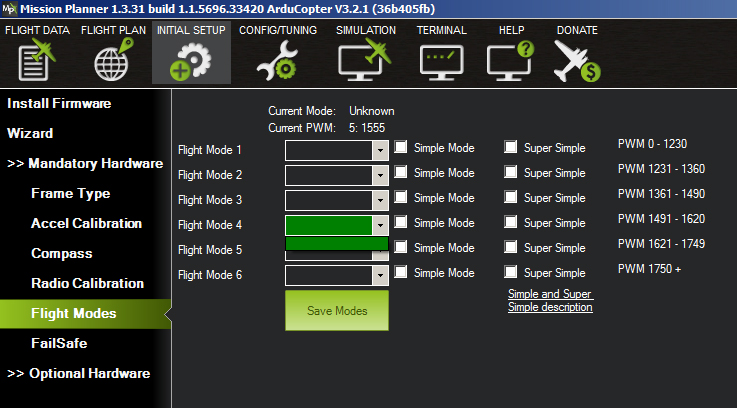
Что то сломалось? Как мне быть?! Помогите!

а в чем странность?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
Неделю назад такого не было, стоял как “конь” вкопанный)). Разобрал, собрал и он начал исполнять. Не критично конечно.
Но перфекционизм диктует правила)
Ах да, винты на апц 10х55 поменял, стоял пластик китай.
В принципе тут все китай) мадэн ин аллиэкспресс. ))
Может подпольное с заводским дружить не хочет? )
Что то сломалось? Как мне быть?! Помогите!
Попробуйте обновится еще раз.
Сброс настроек на апм, рэссет …
Если не поможет, откатите версию летайте на старой!
А на счет китай клонов это как повезет.
У меня все сборка апм с алли. Летает не плохо, как мне кажется.
Только стаб сдох на 3.3в. Поменял, ничего сложного, летает дальше.
(Завтра должна придти посылка с FPV от туда же, народ не жалуется, посмотрим. )
RTL отрабатывает на раз. Хочу заметить, rtl плохо работает когда оч. криво настроен компас. Джпс сразу не верно определят точку взлета, от-туда все вытекающие праблы.
Я всегда после взлета проверяю, метрах пяти от земли режим лоитер, если стоит там где должен уверен что RTL отработает.

Народ! Сегодня вернул дефолтные (что были изначально подобраны) пиды ( rcopen.com/forum/f123/topic233564/20772 ) и потестил. Коптер стал намного отзывчивее. Но есть и странность. В РТЛ летишь домой против ветра либо при боковом ветре, переключаешься в альт холд - коптер резко “клюёт” в сторону, противоположную дому, затем сразу выравнивается. Не всегда, но бывает. До 44* наклонялся сегодня. А иногда просто выравнивается и всё. В чём проблема?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжки
джпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него

У Вас модуль запаян в пленку? Напряжение 5,1-5,15 В. Хорошо, но можно сделать 5,0. Если все закрыто, то можно оставить.
Да, модуль запаян, он именно таким вольтажом и подписан. Надеюсь, это превышение не критично, пока не буду переделывать.
Что бросилось в глаза.
Резкий провал напряжения на регули при увеличении газа. Это может быть связано с тонким проводом от батареи или плохим контактом в разъеме.
Да, проводочки не толстые. Коннекторы видимо, не самые лучшие поставил, все батареи перевел на Т-разъемы. Смотрю тут народ в основном желтыми пользуется. Подскажите, какие лучше?
Кстати, полетал недавно, все четко, без закидонов. Появилась какая-то стабильность и надежность. Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные, но я грешил на ветер или необходимость еще раз откалибровать аксель и компас на улице (квадр летал не строго по осям у меня).
Как переделаю провода, и возможно, коннекторы - кину отчет в виде лога.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжкиджпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него
)))
Имеет место быть)
По вибрациям, движки скаи оригиналы дали хороший результат. за 0.3 не выскакивает YX . Дома взлетал правда). С улицы принес, лог вибрации не показывает.(( глюк какой то, завтра еще попробую.
Думаю пот под моторки прокладки подложить, если вибрации будут.
В общем, методом проб и ошибок думаю сделается, все)
Может здесь кто подскажет.
Появился люфт в одном движке, как практика показала, продольный.
Как убирается инфу не нашел, пришлось немного согнуть дюралевую шайбу под стопорным кольцом. Люфт со стуком прошел. Есть другие способы? ) Нужно подложить что то в толщину 0.1 - 0.2 мм. А что именно так и не придумал. (

Что то сломалось? Как мне быть?! Помогите!
Поставьте МП 1.3.28.
Подскажите, какие лучше?
Обычно делается в соответствии с максимальным током.
И еще общее правило, меньше длина провода - меньше сопротивление провода.
Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные
Если почти незаметные, то оставьте как есть.
Не устраивает, тогда калибруйте компас. И проверяйте по сторонам света

Про никому не нужный функционал мне хватит рассказывать. Ладно?
Хорошо, Вам не буду.
Это всем остальным.
Показал видео, снятое в режиме FollowMe, знакомым горнолыжным инструкторам.
Мгновенная реакция - Хочу!
Понятно, что там не всё так просто, но ребята маются с фантомом, а тут сбыча мечты.
Если “Сбыча” , то да
Вообще, режим очень интересный, но, к сожалению, не вполне документированный.
В частности, я так и не понял, сопровождает ли аппарат цель по вертикали (на что очень надеются горнолыжники), или только по плоскости.
Нашёл две программы для Андроида, Tower и DroidPlanner, как я понял, это один проект, но проги очень разные.
Реально у меня заработал только Tower, хотя и заговорил как раз в стиле радетелей чистоты английского языка (конекцион лост и т.д.)
На ближайших выходных планирую поковыряться подробнее.
Вот ещё что нужно отметить: программа плюс модем жрут батарейку Андроида прям-таки без хлеба. Самсунг Нот 2 садится за час на 50%.

Вообще, режим очень интересный, но, к сожалению, не вполне документированный.
В частности, я так и не понял, сопровождает ли аппарат цель по вертикали (на что очень надеются горнолыжники), или только по плоскости.
Нашёл две программы для Андроида, Tower и DroidPlanner, как я понял, это один проект, но проги очень разные.
Реально у меня заработал только Tower, хотя и заговорил как раз в стиле радетелей чистоты английского языка (конекцион лост и т.д.)
На ближайших выходных планирую поковыряться подробнее.
Вот ещё что нужно отметить: программа плюс модем жрут батарейку Андроида прям-таки без хлеба. Самсунг Нот 2 садится за час на 50%.
Нет, только по горизонтали. Можно загрузить карту высот и он будет следовать. Кстати, теоретически там есть расстояние по высоте от точки, но как работает - не знаю
Нет, только по горизонтали
А если сонар с PX4Flow подоткнуть? Или с Андроида высота не передаётся?
А если сонар с PX4Flow подоткнуть? Или с Андроида высота не передаётся?
ВРоде можно подключить карту высот.
А высота с Андроида передается, но вопрос расстояние от объекта - для гор не оч хорошо, они разной формы и угла…бывают очень крутые перепады.
Спасибо, мне это совершенно не нужно. Даже вредно.
Я катаюсь на кайте, мне этот режим никак не поможет.А почему вы всем видео не покажете? Лучше же увидеть один раз, чем много раз написать.
Мое видео не могу дать, по тому, что воюю с двумя коптерами с гпс режимом. Вот не пойму что не так и все.
Третий коптер не имеет телеметрии еще - в пути

ну и что понту от этого фоллоу ми? Картинка что ли клевая? Пульт оператора все равно этот фолоуми не запомнит. Пока только не будет передаваться высота с цели (вешать на цель второй АПМ с телеметрией?) и всякими датчиками (вот смеху то будет когда ты проедешь под проводами в коптер в них впилится)
Все это пока что больше игрушка и маркетинг. Вот недавно я погонял в режиме дрифт. Вот это да прикольно. И наза этого не умеет.
Единственный режим который мне еще понравился - circle. Руками я не могу стабильно сделать круг. А мозги сами могут. Вот только это надо сначала подключаться по телеметрии, задавать радиус, выводить коптер на этот радиус и запускать circle.
Пока только не будет передаваться высота с цели (вешать на цель второй АПМ с телеметрией?) и всякими датчиками (вот смеху то будет когда ты проедешь под проводами в коптер в них впилится)
а одной телеметрии мало?зачем на цель апм вешать?
А не попадать под провода - вообще не проблема.
Что хочется от FollowMe:
- Трёхмерного автосопровождения
- Возможность включать-выключать этот режим с пульта радиоуправления, а не только с андроида.
- А вот бы, действительно, функционал, реализуемый в андроидной программе упихнуть в АПМ. Там ведь всё по железу есть уже.
В исходниках упоминается что-то вроде swarm flighr. Нельзя ли что-то из этого вытащить?
- Возможность включать-выключать этот режим с пульта радиоуправления, а не только с андроида.
Сейчас такое возможно.
- А вот бы, действительно, функционал, реализуемый в андроидной программе упихнуть в АПМ. Там ведь всё по железу есть уже.
а с какой целью? может и мне это интересно будет, но пока смысла не вижу
Сейчас такое возможно.
А как? Что-то он у меня ни на что не реагировал.
может и мне это интересно будет
Хочется иметь небольшое законченное устройство без болтающихся USB-шнуров, которое лыжник может просто включить и положить в карман, без попыток что-то разглядеть на слепнущем на солнце экране.
А как? Что-то он у меня ни на что не реагировал.
тумблером на пульте
Хочется иметь небольшое законченное устройство без болтающихся USB-шнуров, которое лыжник может просто включить и положить в карман, без попыток что-то разглядеть на слепнущем на солнце экране.
так можно по БТ, но имхо проблемі не вижу - в карман бросил и все норм
Подскажите, на какой из программ для андройда можно включить калибровку компаса.
Нашел только акселерометра.

А как? Что-то он у меня ни на что не реагировал.
Для работы фолоуми нужен источник координат, за которым нужно следовать. Телефон или планшет были подключены?
Телефон или планшет были подключены?
Само собой.
Вопрос в том, что включив этот режим с андроида, я не мог никак воздействовать на коптер с пульта, пока на андроиде не переключился в альтхолд.
Подлежит дальнейшему исследованию.

Собрал квадрик на f450, движками 4220-880kv, регами с прошивкой от симонка и мозгами apm. На 4S после настройки пидов в стабилайзе летает прекрасно, можно без особых проблем висеть в 5 см над землей, либо лететь с большой скоростью в 50см. Альтхолд тоже работает нормально.
Но при попытке активации режима лойтер коптер начинает двигаться куда то влево, либо по диагонали вправо-вперед. Причем иногда это делает резко, накренившись под 45 градусов, с последующим выравниванием и медленным со снижением высоты в туже сторону. Иногда просто медленно дрейфует со снижением. Гпс есть и работает, миссион планнер пишет 3d-fix. Судя по логам показания барометра в целом совпадают с высотой по гпс, вибрации -/+3 по x/y и -15/-5 по z.
Судя по логам апм при включении лойтер зачем то дает команду на снижение высоты. Приложу картинку с логами высоты по барометру/гпс и целевой высоты.
На всякий случай прогнал сейчас compassmot. Может быть что то еще посоветуете?
включив этот режим с андроида, я не мог никак воздействовать на коптер с пульта, пока на андроиде не переключился в альтхолд
Даже переключение на другой режим в аппаратуре и обратно не вернуло контроль? Если так то нужно серьезно допиливать.
при попытке активации режима лойтер коптер начинает двигаться куда то влево, либо по диагонали вправо-вперед
Симптомы неверно выставленного поворота компаса, или плохой калибровки. Направление по карте в планере совпадает с истинным? Снижение высоты произошло из-за срабатывания failsafe и переключения режима на land.