А давайте обсудим Arducopter - APM

Не вижу ничего смешного. Тут все покупают неоригинальные комплектующие, потому что они в три раза дешевле, и у всех они работают. Какая лотерея? Человек купил в магазине вещь на которой написано - ЖПС для ардукоптера! Значит должно сразу подключатся и работать. Никаких экспериментов тут близко нет. Вы что-то путаете. Или в чем тогда смысл открытости проекта, если нужно покупать только у монополиста?
Так что когда два дня бьешься над тем, что у других сразу работает, это любого из колеи выбьет! Поэтому его замечание вполне понятно. И оно не относится напрямую к АПМу а к тому, что китайцы часто делают косячно - то провода перепутают, то надписи.
Это не говоря о том, что у самого АПМа косяков изначально хватало.
Дело не в открытость АПМ и дешевезне комплектующих, а в том, что те комплектующие, которые в 3-4 раза дешевле - они производятся с низким уровнем культуры производства продукции - что-то сменили, что-то недопаяли, что-то решили, что не пригодится…
Дело не в оригинальности продукции, а в том, что кто и как ее произвел. Есть же клоны которые еще и дороже оригинала, но вы, как и большинство (и я в том числе) - берете самый дешевый, а не самый качественный.
Значит вывод из вашего высказывания такой - покупать либо оригинал от 3ДР
вовсе нет, специально чтоли коверкаете?
я говорю о том что если цель не получить кота в мешке - не выкраивать последний цент, не выискивать контроллер на три копейки дешевле, а внимательно изучить предложение, почитать отзывы , почитать что пишут коллеги кто уже заказал и если кто то к примеру брал контроллер за 50 баксов, отписался что продавец внятный, качество на высоте - не выиискивать за 49 долл …
Может речь о MINIPX4 Beta 1, который уже в продаже?
я не уверен что именно эта версия с ошибкой разводки и насколько существенна эта ошибка
Спасибо, что предупредили.
пожалуйста
Простите Алексей, но это тоже неправда. Ни от одного человека ничего подобного не слышал, у всех все отлично работает. А если не работает, открывается диспут и возвращаются деньги. Вероятность попасть на левак есть, но она минимальна, и избежать легко не покупая в совсем стремных магазинах.
Даже через меня прошли все ревизии апма за три года, и куча других железок. И ничего.
я всего за год видел здесь на форуме столько брака…
мне как-то повезло, хотя, тоже не уверен - валькера бракованая попалась, а апм и пикс не могу заставить в жпс режимах летать - все возмущаются на DCM BAD HEADING.
Так что Сергей задал совершенно правильный вопрос. Про плюнуть и купить Назу за 130$, или Пиксхок за 300. Что вас так расстроило?
стоп, стоп!!! вы цену на назу урезаную говорите, а сравниваете с ховком полноценным. Вы бы сравнили с А2, ву конгом или хотя бы с наза м в2,которая хуже, но стоит тоже 300. Имхо наза по функционалу в подметки не годится, но если же мы говорим про ВАЖНЫЙ функционал, а не вообще, то надо сравнивать минимум с вуконгом, а там это совершенно другой уровень.
вовсе нет, специально чтоли коверкаете?
я говорю о том что если цель не получить кота в мешке - не выкраивать последний цент, не выискивать контроллер на три копейки дешевле, а внимательно изучить предложение, почитать отзывы , почитать что пишут коллеги кто уже заказал и если кто то к примеру брал контроллер за 50 баксов, отписался что продавец внятный, качество на высоте - не выиискивать за 49 долл …
Я вроде то же самое и написал. И вроде все так стараются и делать? Ну и потом не так уж много производителей. Вот у нас рынке все продают черешню от одного поставщика. Хотя у всех цены разные. Апм тоже не 10 заводов делают. Предположу, что два или три.
я всего за год видел здесь на форуме столько брака…
Точную цифру назовите пожалуйста. Потом поделите на количество проданных плат и какой процент получится?
По идее, 5.8 на 2.4 не даёт наводок, но всё же либо так совпало и я начал в таких местах летать, либо сигнал с аппы начал глючить и иногда пропадать.
Если разнести то влияния особо нет(~15 сантиметров у меня сейчас разнесено), однако при близком расположении(сантиметров 5 примерно) я замечал ухудшение приема как на 2.4 так и 433, и это еще и при том что я 1вт видеопередатчик не использую, максимум 500мв…с 1вт может быть и хуже…
Лучше разнести вообщем…ну и я не спец в данной тематике, это лишь мои наблюдения, можете еще в разделе фпв в теме про 5.8 задать вопрос, там достаточно компетентных людей которые ответят чисто по теории как оно…
Я бы посоветовал для начала пропы сменить
До этого был пластик 1045 родные xaircraft, теперь закупил 1047 карбон rctimer-овские рассверленные (у моторов вал 9мм) сбалансированные. На некарбон менять не хочу, пластик у меня отстреливался (после чего на карбон и ушёл).
А по радио может 5.8 давать такие глюки?
Точную цифру назовите пожалуйста. Потом поделите на количество проданных плат и какой процент получится?
точную цифру не назову, но за десяток.
А про процент - наверняка существенно ниже, чем процент от 3др
Он может “портить” сигнал с аппы?
Вполне может. Перегружается входной тракт, на входе врядли стоят серьезные фильтры, или приемник имеет огромный динамический диапазон. Могу посоветовать антенны приемника поставить на передние лучи под углом 45* в разные стороны, и видеопередатчик выставить сзади антенной вниз.
но многие англоговорящие люди произносят это слово как ХОК
Тогда уж ХОУК, w проглатывается и произносится как у.
Цена на пикс без OF стоит такая же как на назу 2, вполне конкуретное предложение, и то и то будет отлично летать на рекомендованных производителем комплектующих. В пиксе больше функционал и гибкость, наза более дружелюбна к пользователю, каждый выбирает что ему нужно. Китайские клоны и разработки, большей частью, имеют низкое качество и ошибки, отрицать это глупо. Зачем все в кучу валить, вы уже определитесь, что хотите всем сказать? Что апмоклон сложнее заставить работать и настроить чем назу? Это и так очевидно.
Мальчики, не ссорьтесь 😃
Лучше подскажите, почему при ошибках компаса коптер улетает в терновник. При переключении в RTL, коптер боком, боком с набором сокрости и потерей высоты ушел в кусты. Хорошо еще что он три коптер со складывающимися лучами. И чем чревато отключение EKF?
Логи тут.
Наза имеет весь необходимый функционал для отличных полетов, и даже сьемки видео.
Для “летающего штатива” взял Назу, не хватает облета точки, не настроить высоту возврата при потери связи, что чревато крашем.
АРМ интереснее.
Ребя, подскажите гружу лог, а уровня вибрации нет(
джпс, напряжение есть и т.д. а вибрация прямая полоса(
Летал минут 18 при чем, три раза подряд а АПМ лог один, последний, наверное из за объема памяти?
Как-то он странно себя ведет реж. лоитер.
Сейчас кину видео.
Может криво сделана калибровка компаса. Завтра попробую сделать заново.
Делал дома, т.к. нет возможности включить её на ул. (
Как-то он странно себя ведет реж. лоитер
а в чем странность?
Поискал по ветке, такой проблемы не нашел.
Обновился Mission Planer до 1.3.31 build 1.1.5696.33420.
Теперь в разделе Flight Modes (Initial Setup -> Mandatory Hardware -> Flight Modes) в выпадающих списках нет ничего
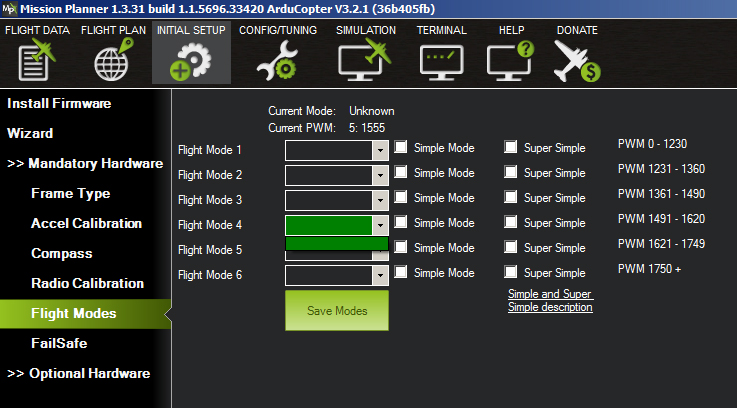
Что то сломалось? Как мне быть?! Помогите!
а в чем странность?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
Неделю назад такого не было, стоял как “конь” вкопанный)). Разобрал, собрал и он начал исполнять. Не критично конечно.
Но перфекционизм диктует правила)
Ах да, винты на апц 10х55 поменял, стоял пластик китай.
В принципе тут все китай) мадэн ин аллиэкспресс. ))
Может подпольное с заводским дружить не хочет? )
Что то сломалось? Как мне быть?! Помогите!
Попробуйте обновится еще раз.
Сброс настроек на апм, рэссет …
Если не поможет, откатите версию летайте на старой!
А на счет китай клонов это как повезет.
У меня все сборка апм с алли. Летает не плохо, как мне кажется.
Только стаб сдох на 3.3в. Поменял, ничего сложного, летает дальше.
(Завтра должна придти посылка с FPV от туда же, народ не жалуется, посмотрим. )
RTL отрабатывает на раз. Хочу заметить, rtl плохо работает когда оч. криво настроен компас. Джпс сразу не верно определят точку взлета, от-туда все вытекающие праблы.
Я всегда после взлета проверяю, метрах пяти от земли режим лоитер, если стоит там где должен уверен что RTL отработает.
Народ! Сегодня вернул дефолтные (что были изначально подобраны) пиды ( rcopen.com/forum/f123/topic233564/20772 ) и потестил. Коптер стал намного отзывчивее. Но есть и странность. В РТЛ летишь домой против ветра либо при боковом ветре, переключаешься в альт холд - коптер резко “клюёт” в сторону, противоположную дому, затем сразу выравнивается. Не всегда, но бывает. До 44* наклонялся сегодня. А иногда просто выравнивается и всё. В чём проблема?
Прыгает на пару см вверх ввниз, назад вперед хотя ветра нет.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжки
джпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него
У Вас модуль запаян в пленку? Напряжение 5,1-5,15 В. Хорошо, но можно сделать 5,0. Если все закрыто, то можно оставить.
Да, модуль запаян, он именно таким вольтажом и подписан. Надеюсь, это превышение не критично, пока не буду переделывать.
Что бросилось в глаза.
Резкий провал напряжения на регули при увеличении газа. Это может быть связано с тонким проводом от батареи или плохим контактом в разъеме.
Да, проводочки не толстые. Коннекторы видимо, не самые лучшие поставил, все батареи перевел на Т-разъемы. Смотрю тут народ в основном желтыми пользуется. Подскажите, какие лучше?
Кстати, полетал недавно, все четко, без закидонов. Появилась какая-то стабильность и надежность. Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные, но я грешил на ветер или необходимость еще раз откалибровать аксель и компас на улице (квадр летал не строго по осям у меня).
Как переделаю провода, и возможно, коннекторы - кину отчет в виде лога.
вибрации посмотрите, китайские винты видать мягкие и легкие были, меньше резонировали с лучами.
если вибрации - попробовать лучи на растяжкиджпс у нас какойто ненастоящий, имхо с ним у нас хуже чем без него
)))
Имеет место быть)
По вибрациям, движки скаи оригиналы дали хороший результат. за 0.3 не выскакивает YX . Дома взлетал правда). С улицы принес, лог вибрации не показывает.(( глюк какой то, завтра еще попробую.
Думаю пот под моторки прокладки подложить, если вибрации будут.
В общем, методом проб и ошибок думаю сделается, все)
Может здесь кто подскажет.
Появился люфт в одном движке, как практика показала, продольный.
Как убирается инфу не нашел, пришлось немного согнуть дюралевую шайбу под стопорным кольцом. Люфт со стуком прошел. Есть другие способы? ) Нужно подложить что то в толщину 0.1 - 0.2 мм. А что именно так и не придумал. (
Что то сломалось? Как мне быть?! Помогите!
Поставьте МП 1.3.28.
Подскажите, какие лучше?
Обычно делается в соответствии с максимальным током.
И еще общее правило, меньше длина провода - меньше сопротивление провода.
Правда, аппарат один раз начал совершать мелкие круговые движения, почти не заметные
Если почти незаметные, то оставьте как есть.
Не устраивает, тогда калибруйте компас. И проверяйте по сторонам света
Про никому не нужный функционал мне хватит рассказывать. Ладно?
Хорошо, Вам не буду.
Это всем остальным.
Показал видео, снятое в режиме FollowMe, знакомым горнолыжным инструкторам.
Мгновенная реакция - Хочу!
Понятно, что там не всё так просто, но ребята маются с фантомом, а тут сбыча мечты.