А давайте обсудим Arducopter - APM

ребят подскажите какой параметр меняет скорость вращения по yaw в stab и poshold? а то очень быстро крутится
ACRO_YAW_P controls how quickly copter rotates based on a pilot’s yaw input. The default of 4.5 commands a 200 deg/sec rate of rotation when the yaw stick is held fully left or right. Higher values will make it rotate more quickly.
ardupilot.org/copter/docs/stabilize-mode.html#stab…
Как вел себя такой аппарат при автотюне?! ведь очень не советуют делать автотюн на таком размере…
Упс, а я и не знал, что размер имеет значение. Если честно, то я не заметил разницы, между квадриком 450мм, и этой хексой 750мм, когда они делали автотюн, со стороны все выглядело идентично, качались про крену и питчу, потом по яву, потом попищал и успокоился.
Подскажите пож-та, включаю аппу, потом квадр (рама 450; апм2,6; жпс 7М; акб 3S 5.2A;питание ЖПС от отдельного ВЕС) после разблокировки пропеллеры не вращаются, начинается вращение после добавления газа стиком (раньше вращались без добавления газа), произошло после того, как сделал калибровку моторов…
при последующей перекаблибровке калибровке -проблема не ушла…
что делать и куды копать???
в полном списке параметров MOT_… поменяйте с 70 на 90-100 и будет вам счастье
раскачка в быстром спуске может быть уменьшена за счет увеличения тротл мин, увеличения рэйт д, изменения кривой газа - тролл курв.
кроме того можно попробовать включить торможение на регулях если они поддерживают.
в случае включения торможения пиды придется координально перенастраивать
Еще один интересный момент. Во время спуска он начинает раскачиваться именно по питчу, но не по роллу. И тут мой приятель правильно заметил, что у меня весит достаточно тяжелый и длинный аккумулятор (20 см в длинну и где-то 1.4 кг), который лежит вдоль коптера от хвоста к носу, на этой же линии еще и подвес с камерой. Т.е., что коптеру надо потратить больше усилий, чтобы наклониться по питчу, нежели по роллу, и это таки верно, беря во внимание тот факт, что раскачка при спуске была только по питчу, то, как совет, надо еще P по питчу чуть поднять, что оно не должно быть таким же, как и у ролла.
Что думаете товарищи? Как по мне, то здесь есть смысл.
потом по яву,
Даже по яву? -первый раз такое слышу. сколько раз делал,по яву не крутился.
Даже по яву? -первый раз такое слышу. сколько раз делал,по яву не крутился.
Угу, по всему, по роллу, по питчу, а потом еще по яву крутился.
Вот параметр AUTOTUNE_AXES, это битавая маска, в которой указано, по каким осям делать АвтоТюн, если там записано 7мь, то сделает по всем трем.
сделал AutoTune, PIDы настроились, P поднялись, если сравнивать с значениями по умолчанию раза в два.
Тоже, когда делал AutoTune на моторах (5010) с низкими оборотами, результатом был не доволен, такая же картина, P-пришлось вернуть на дефолтные. в итоге вернул все настройки обратно. При спуске на таких моторах и больших пропах, всегда колбасит, большая инерция (магнитов много и не маленькие), но это не большая плата за эффективность.
когда делал AutoTune
на 1047 не помог
на 1045 более менее
кстати, кто как настраивает пиды?
в акро или так?
хз все чудно работает автотюн. Вот видео после автотюна
www.youtube.com/watch?v=mO3PnNo0Hf4
тюнил сначала ролл+питч и отдельно яв
вмг 980кв 10х4.5 3S
Здравствуйте коллеги.
На днях летал-с. контроллер APM 2.6. Возникла проблема:
2 раза тело пыталось врубить LAND.
Первый раз: сработал FS по обрыву радио, включился RTL, потом LAND.
Вовремя успел переключить в Stab и вернуться домой, благо высота была около 50 м.
Второй раз сел в снег, высоты не хватило. 😦
После просмотра графиков было выяснено, что все произошло в связи с EKF_CHECK.
В МП в параметрах я установил EKF_CHECK = 0, думал отключил, ан не тут-то было! Оказывается он на APM работает!!!???
В связи с этим вопрос: как его выключить, что бы мозги не делал?
После прочтения информации про EKF включил логирование вибрации и подлетнул дома на минутку, файл приложен.
Погонял тело вверх-вниз, влево вправо, на сколько позволяла комната.
Просьба: Посмотрите пожалуйста логи, оцените вибрации, лог приложен.
Заранее спасибо.
После просмотра графиков было выяснено, что все произошло в связи с EKF_CHECK.
В МП в параметрах я установил EKF_CHECK = 0, думал отключил, ан не тут-то было! Оказывается он на APM работает!!!???
В связи с этим вопрос: как его выключить, что бы мозги не делал?Заранее спасибо.
Ну сам фильтр Калмана в АПМ не работает, но наскольно я понял, переменная EKF ипользуется, для различных аварийных ситуаций, в основном из-за ошибок по компасу и ГПС.
В параметрах фигурирует только параметр EKF_CHECK_THRESH 0.8-1.0 (порог срабатывания FailSafe по EKF)
есть еще параметр действия, но насколько помню в параметрах АПМ он не доступен.
FS_EKF_ACTION: EKF Failsafe Action
1 Land
2 AltHold
3 Land even in Stabilize
Всем добрый вечер!
Пытаюсь разобраться с АПМ, но как то туго мне поддается…
проблема собственно в чем, кратко опишу последовательность своих действий:
Перестал коннектиться АПМ к компьютеру после подключения GPS, ну и соответственно не работающий GPS (не видел спутники).
Прошил контроллер атмега , через прогу Атмега -Флип, и после прошивки при включенном АПМ горел зеленый светодиод, далее подключил к программе ардукоптер все законнектилось через ЮСБ, далее решил прошить ЖПС, загрузил кастомную прошивку, через У-центр прошил GPS 7М, и обратно вернул прошивку ардукоптера.
потом началась вот такая фигня с подключением:
вот фото платы:
в полном списке параметров MOT_… поменяйте с 70 на 90-100 и будет вам счастье
поменял, но работает через раз…((((
В параметрах фигурирует только параметр EKF_CHECK_THRESH 0.8-1.0 (порог срабатывания FailSafe по EKF)
Я про этот параметр и говорю. Извиняюсь не дописал. У меня параметр EKF_CHECK_THRESH = 0. Вроде отключает проверку. Но не уверен после полетов…
Подскажите плз все таки про вибрации. Они у меня вроде в нитку, но нитка не ровная, волнообразная
Подскажите плз все таки про вибрации. Они у меня вроде в нитку, но нитка не ровная, волнообразная
В том то и дело, что не ровная, а волнообразная и со всплесками. Как-будто АПМ весит на мягких резинках.
Как только коптер взлетел, начались вибрации.
И еще питание АПМ на грани.
Как-будто АПМ весит на мягких резинках.
Спасибо. С пониманием - разобрались. Хотя такой вопрос: я во время тестового полета делал резкие кивки и по питчу и по роллу.
Как надо вибрации проверять? взлетел, повисел, приземлился? Или нужно резко-агрессивно по питчу и роллу его гонять?
И еще, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9? Нужно что бы фейл сейв с Land-ом не врубался, что бы игнорировались возможные расхождение компаса и GPS.
Дело в том, что все летает, домой возвращается, в лойтере висит, но вот эта ошибка с фейлсевом в виде Land - очень напрягает 😦 Прям как мина замедленного действия!
Заранее спасибо за помощь!
ошибка с фейлсевом в виде Land - очень напрягает
Так поменяйте в полном списке параметров - установите AltHold, например.
Как надо вибрации проверять? взлетел, повисел, приземлился? Или нужно резко-агрессивно по питчу и роллу его гонять?
Для начала просто повесите. Потом сделайте пролет на скорости.
Циклические раскачивания только сбивают с толку.
Так поменяйте в полном списке параметров - установите AltHold, например.
В APM нельзя выставить тип фейлсева по EKF. Land и все. Или я ошибаюсь?
Для начала просто повесите. Потом сделайте пролет на скорости.
Если “просто повесите” - то нитка! Амплитуда колебания ±2.
И все таки, может кто знает, EKF_CHECK_THRESH поставить 0 или 0,9?
Кто с каким летает, подскажите плз!
Кто использовал такие платы АПМ (красного цвета) -???
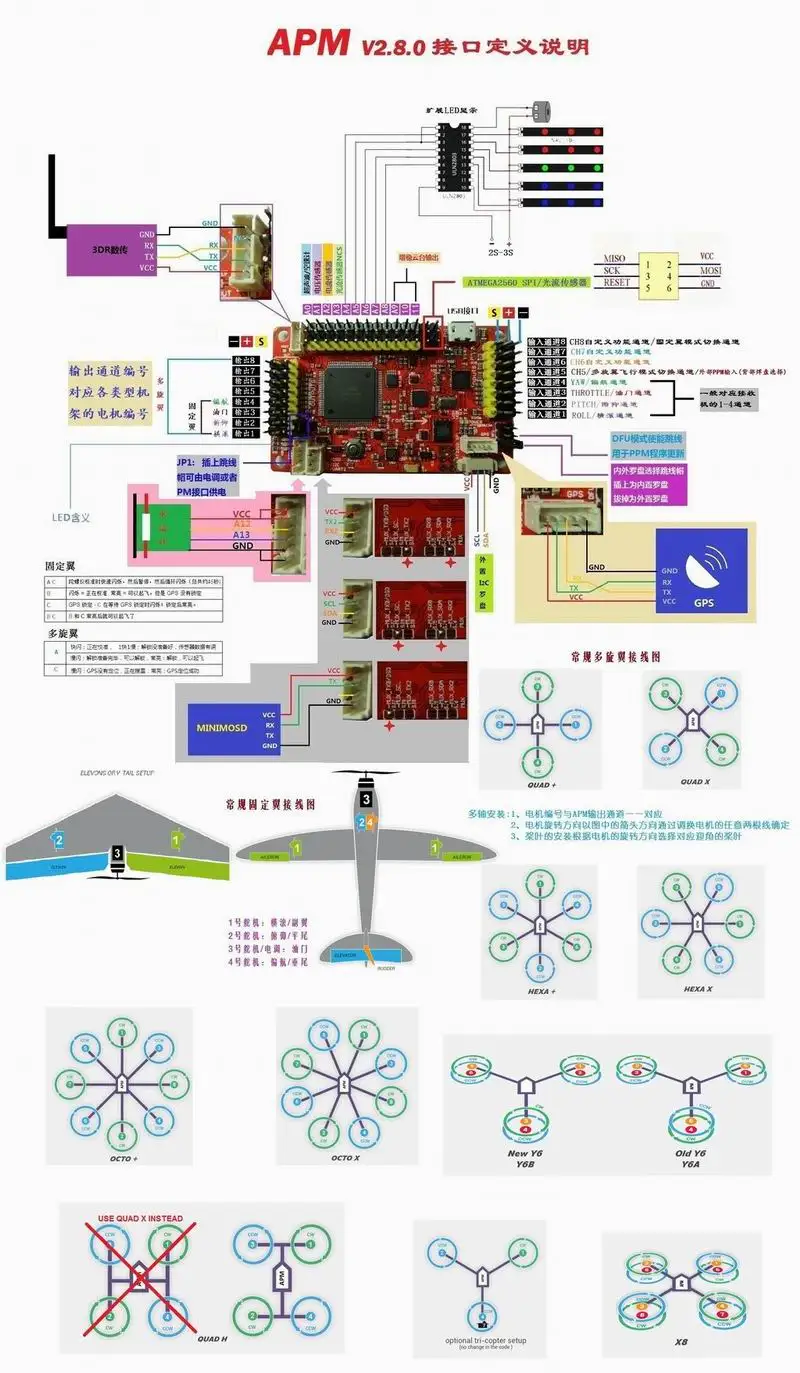
или кто может поделиться ссылкой на продавана с работоспособной АПМ???