А давайте обсудим Arducopter - APM

Помидоры за то, что вы вообще не поняли сути проблемы (и не пытаетесь понять даже после толстого намека), но даёте советы из серии КэП Очевидность.
Помидоры за то, что вы вообще не поняли сути проблемы (и не пытаетесь понять даже после толстого намека), но даёте советы из серии КэП Очевидность.
Я не специалист по интернет общению , но теперь знаю на сленге что есть КэП. На ошибках учатся, но у меня не было ошибок поэтому нет такого богатого опыта. Мне достаточно выполнить указания по руководству, поэтому вопросов о том что у меня не работает не задаю. Если тебе так важно получать удовлетворение от собственных советов я могу уступить и больше сюда не заходить
Может стик по yaw не откалиброван - коптер не вертится сам? ибо если таки- то арду может не вертется ибо считает что по yaw управление идёт с пульта.
Сам не “вертится”, в ручных режимах всё ровно и красиво.😁 Ссылочку прочёл,мёртвую добавил. Завтра - момент истины…😎
Не пробовали откатить на 4.0.3 и перепроверить? Вроде как там у меня оно работало и именно на таком же ПК. Правда, smart rtl не включал.
Это уже как крайняя мера, пока пробуем победить “вручную”😒 А smart rtl и не думал включать ибо пока даром не нужен. Просто была мысль мож там чего “по умолчанию” нахимичили…
Вот ещё интересный нюанс всплыл (сегодня летал 2-ка стояла значен.) возможно как-то связан с WP_YAW_BEHAVIOR ? Лаптями не кидайте - пр.код для меня чёрная магия…😁
Вот ещё интересный нюанс всплыл (сегодня летал 2-ка стояла значен.) возможно как-то связан с WP_YAW_BEHAVIOR ?
По описанию параметра - режим 2 в 4.0.х вообще “устарел”, то есть, видимо, просто игнорируется.
А вообще это всё относится к failsafe (причём FS “по каналу газа”, когда значение этого канала становится “ниже минимума”): ardupilot.org/copter/docs/radio-failsafe.html#rece…
Так что в вашем случае вообще никакой роли не играет - вы же не теряли управление.
Имейте в в виду , что FS бывают разные. О чем я? Вот например, у меня приемник стоит с PWM выходами и через конвертор в PPM заходит сигнал на контроллер. Ну я настроил приемник на FS и в момент пропадания сигнала приемник устанавливает режим FS, но сам контроллер этого НЕ ЗНАЕТ. Для него , т е для контроллера ничего обычного не происходит. Ну включился режим RTL , ну и нормально. По телеметрии прошло , что режим RTL активирован. Все пашет. Коптер возврашается. Второй вариант - у меня SBUS идет напрямки. И в момент пропадания сигнала по шине идет информация об этом. И контроллер понимает, что с приемника уже взять нечего и полностью игнорирует наличие приемника. Контроллер начинает отрабатывать , что Вы там указали при FS, ну пусть RTL. Все происходит как и в первом случае со стороны внешнего наблюдателя, однако по телеметрии идет сообщение о срабатывании FS, и активации RTL. Разница в том, что контроллер знает, что сработал FS. В этом случае ВСЕ СИГНАЛЫ с приемника пиксом игнорируются, до появления сигнала от приемника о том, что связь восстановлена. Например, если ВЫ настроили свой приемник на FS и указали там какие то значения для подвеса например, ну встать ему в горизонт как пример. Приемник в момент FS будет выдавать сигнал необходимый , но если этот сигнал идет через Пикс, т е через шину SBUS, то он до подвеса не дойдет. Вам в этом случае надо напрямую снять сигнал с приемника и передать его подвесу. Это надо иметь в виду. А поведение носа - тут уже рассказали как настроить. В предыдущей прошивке точно пашет нормально, в 4,0,5 не пользовался.
Имейте в в виду , что FS бывают разные.
Да,благодарю,в курсе…
Так что в вашем случае вообще никакой роли не играет - вы же не теряли управление.
Нет,всё хорошо,с РУ,просто кончились варианты и в голову начинает приходить всякая ересь…
Ща поеду-“полетаю” его, на 4.0.5,со значением RTL=1 и увел. мёртвой зоной по YAW. Отпишу…
А поведение носа - тут уже рассказали как настроить.
Как его (поведение) настроить я знаю😁 Проблема в том,что на настройку никакой реакции…
Очень странно. Я летал на многих прошивках, ну минимум 5 последних, кроме самой последней и НИГДЕ проблем не было. Все четко работало. Я обычно ставлю носом на WP лететь(это 1). По умолчанию там стоит лететь тем, чем повернут был.
Я обычно ставлю носом на WP лететь(это 1).
Как и в Вашем случае,стоит значение =1 и мёртвая зона по яв увел. до 50., но летал он сегодня,несмотря на то,что хорошо,снова жопой вперёд ,в ртл…😁 Впрочем,как и в миссии,не разворачивался…
И надо признать очевидное - прошка явно не при делах. Есть какой- то косяк в настройках,либо в калибровках… Перекалибровал аппу,перекалибровал РУ, в МП, вернул мёрт.зону по яв в стд., тестить однако сегодня уже поздновато…
Я последнию прошивку редко когда ставлю. Поставьте что то последнее из 3… там что то. Но что то мне кажется у Вас не так.
Может стик по yaw не откалиброван - коптер не вертится сам? ибо если таки- то арду может не вертется ибо считает что по yaw управление идёт с пульта.
про rc4 deadzone
discuss.ardupilot.org/t/tail...arameter/33056
Докладываю: Ваше предположение было правильным. Только и стики,в аппе и аппа, в МП,были откалиброваны изначально правильно. Виной такому поведению сама аппа (УГ) turnigy 9xr pro., вернее не она сама УГ (хотя и она не далеко ушла) а её стики,на чмошных резиках, которые ближе к нолю градусов темп. начинают жутко уплывать… И то,что увеличивал мёртвую зону по яв - не помогало. Сегодня проверил - уплывает просто фатально. Чтоб вернуть нулевое значение калибровки надо загнать триммер практически до упора…
Благодарю всех,за дельные советы…
Добрый вечер.Прошу не пинать если ошибся разделом… решил поднять плату Multiwii _Pro.Если кто сталкивался - подскажите. Вопрос. Заливаю прошивку Multiwii 2.4 - плата видит приемник,датчики отрабатывают,но большое количество ошибок.(регули и моторы не подключены). Через небольшой промежуток времени датчики начинают глючить. Заливаю прошивку версии 2,4 от Maxovik датчики работают - приемник - плата не видит.Подскажите оптимальную прошивку на это чудо инжинерной мысли).Заранее спасибо.
Добрый вечер всем.
Подскажите, как связать Matek765 и R9SX по Fport. Управление появилось, а телеметрии на TX16S нет.
Настройки по списку.
BRD_ALT_CONFIG to 1
RSSI_TYPE to 3
SERIAL7_OPTIONS to 15
SERIAL7_PROTOCOL to 23
NO NEED to touch RC_OPTIONS from the default value of 0
Всем здравствуйте, я в коптеростроительстве новичок, построил трикоптер, контроллер apm 2.8, прошивка 3.21», выполнил первоначальные настройки. Регуляторы и сервопривод подсоединил по общепринятой схеме. То есть регуляторы в 1,2 и 4 выходы а серву в 7. Проблема в том что при движении стика рысканья серва молчит. Хотя при подключении питания вздрагивает. Серву менял, не помогает.
В общем то ли я такой тупой, то ли незнаю. Серва у меня не двигается потому что каждый раз при подключении питания apm запускается и регуляторы пищат. Я так понимаю это режим калибровки регуляторов.
Регуляторы калибрую в все вместе, как по инструкции, сразу после калибровки радиоаппаратуры. Далее стик газа на минимум и отсоединяем батарею. Но стоит мне потом снова ее подключить как регуляторы снова начинают пищать. Далее подключаюсь к usb и если попытаться заармить в мишн планнер то в левом верхнем экране появляется сообщение prearm: RC not calibrated. Может кто объяснить что я делаю не так?
Регуляторы и должны “пищать” каждый раз при подключении акб. другое дело - КАК они пищат. Если количество писков соответствует количеству банок Вашего акб то это инициализация акб регуляторами и это нормально. А вот если они постоянно часто пищат то это регуляторы не откалиброваны. Тогда вытекает следующее - неизвестно какие у Вас регуляторы. Если банальные аля симонк или бихели-с то их калибруют по мурзилке. А вот если у вас бихели-32 то их калибруют по проге своей. prearm:RC not calibrated (радио контроль не откалиброван) вообще то не имеет отношение к тому КАК откалиброваны или вообще откалиброваны ваши регули. Это сообщение о том что Ваш полетник не откалиброван по радиоаппаратуре. Проще Вы не прошли или у Вас не получилось настроить правильно пункт Radio Calibration. Читайте, вникайте, калибруйте.
ПС. Еще не маловажно чтобы вот эти значения 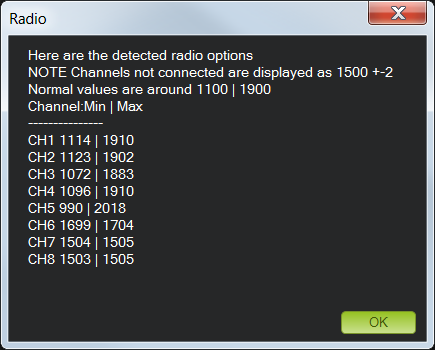 для рабочих-задействованных апой каналов были для минимума чуть выше 1000 (примерно 1010) а для максимума чуть меньше 2000 (примерно1990) Я так себе ставлю, хотя мурзилка рекомендует + или - 100 от значений. О чем Вас и предупреждает текст на картинке. К слову даже на картинке из мурзилки далеко не идеал. В идеале ВСЕ значения мин и все значения мах на всех каналах должны быть одинаковыми. (конечно это в идеале, в жизни мало кто так заморачивается). Если у Вас получается намного другие значения то Вам нужно подгонять (изменять) регулировки на самой апе а потом еще раз заново калибровать полетник в разделе Radio Calibration.
для рабочих-задействованных апой каналов были для минимума чуть выше 1000 (примерно 1010) а для максимума чуть меньше 2000 (примерно1990) Я так себе ставлю, хотя мурзилка рекомендует + или - 100 от значений. О чем Вас и предупреждает текст на картинке. К слову даже на картинке из мурзилки далеко не идеал. В идеале ВСЕ значения мин и все значения мах на всех каналах должны быть одинаковыми. (конечно это в идеале, в жизни мало кто так заморачивается). Если у Вас получается намного другие значения то Вам нужно подгонять (изменять) регулировки на самой апе а потом еще раз заново калибровать полетник в разделе Radio Calibration.
ППС. Многие забивают на это и летают “как получилось”. Но рано или поздно это сыграет злую шутку с вашим пепелацем и как следствие с Вашим карманом и нервами.
Мои регуляторы как раз таки пищат постоянно часто. Если подключить каждый регуль отдельно к приемнику, то все калибруется как положено, но стоит регуляторы подключить к APM - начинают все три пищать как перед калибровкой.
Я где то читал, что может на это влиять инвертирование каналов управления. Так вот, у меня максимум газа когда стик газа опущен вниз, понимаю логически что это неправильно, но переключатели на пульту, что отвечают за инвертирование переключены на norm. Аппаратура у меня старенькая 4х канальная 40 mhz, это не может каким то образом влиять?
Аппаратура у меня старенькая 4х канальная 40 mhz
я бы выкинул этот хлам 😃
я бы выкинул этот хлам 😃
Ну решили попробовать из того что есть, пекорды ставить на этой аппе я не собираюсь, а после нового года уже купить нормальную аппаратуру.
старенькая 4х канальная
ардукоптеру надо минимум 5 каналов
Мои регуляторы как раз таки пищат постоянно часто. Если подключить каждый регуль отдельно к приемнику, то все калибруется как положено, но стоит регуляторы подключить к APM - начинают все три пищать как перед калибровкой.
Я где то читал, что может на это влиять инвертирование каналов управления. Так вот, у меня максимум газа когда стик газа опущен вниз, понимаю логически что это неправильно, но переключатели на пульту, что отвечают за инвертирование переключены на norm. Аппаратура у меня старенькая 4х канальная 40 mhz, это не может каким то образом влиять?
вам уже ответили почему стоит выкинуть этот хлам. Если вы еще раз продублируете сообщение то лучше от этого никому не станет