А давайте обсудим Arducopter - APM

Имейте в в виду , что FS бывают разные.
Да,благодарю,в курсе…
Так что в вашем случае вообще никакой роли не играет - вы же не теряли управление.
Нет,всё хорошо,с РУ,просто кончились варианты и в голову начинает приходить всякая ересь…
Ща поеду-“полетаю” его, на 4.0.5,со значением RTL=1 и увел. мёртвой зоной по YAW. Отпишу…
А поведение носа - тут уже рассказали как настроить.
Как его (поведение) настроить я знаю😁 Проблема в том,что на настройку никакой реакции…
Очень странно. Я летал на многих прошивках, ну минимум 5 последних, кроме самой последней и НИГДЕ проблем не было. Все четко работало. Я обычно ставлю носом на WP лететь(это 1). По умолчанию там стоит лететь тем, чем повернут был.
Я обычно ставлю носом на WP лететь(это 1).
Как и в Вашем случае,стоит значение =1 и мёртвая зона по яв увел. до 50., но летал он сегодня,несмотря на то,что хорошо,снова жопой вперёд ,в ртл…😁 Впрочем,как и в миссии,не разворачивался…
И надо признать очевидное - прошка явно не при делах. Есть какой- то косяк в настройках,либо в калибровках… Перекалибровал аппу,перекалибровал РУ, в МП, вернул мёрт.зону по яв в стд., тестить однако сегодня уже поздновато…
Я последнию прошивку редко когда ставлю. Поставьте что то последнее из 3… там что то. Но что то мне кажется у Вас не так.
Может стик по yaw не откалиброван - коптер не вертится сам? ибо если таки- то арду может не вертется ибо считает что по yaw управление идёт с пульта.
про rc4 deadzone
discuss.ardupilot.org/t/tail...arameter/33056
Докладываю: Ваше предположение было правильным. Только и стики,в аппе и аппа, в МП,были откалиброваны изначально правильно. Виной такому поведению сама аппа (УГ) turnigy 9xr pro., вернее не она сама УГ (хотя и она не далеко ушла) а её стики,на чмошных резиках, которые ближе к нолю градусов темп. начинают жутко уплывать… И то,что увеличивал мёртвую зону по яв - не помогало. Сегодня проверил - уплывает просто фатально. Чтоб вернуть нулевое значение калибровки надо загнать триммер практически до упора…
Благодарю всех,за дельные советы…
Добрый вечер.Прошу не пинать если ошибся разделом… решил поднять плату Multiwii _Pro.Если кто сталкивался - подскажите. Вопрос. Заливаю прошивку Multiwii 2.4 - плата видит приемник,датчики отрабатывают,но большое количество ошибок.(регули и моторы не подключены). Через небольшой промежуток времени датчики начинают глючить. Заливаю прошивку версии 2,4 от Maxovik датчики работают - приемник - плата не видит.Подскажите оптимальную прошивку на это чудо инжинерной мысли).Заранее спасибо.
Добрый вечер всем.
Подскажите, как связать Matek765 и R9SX по Fport. Управление появилось, а телеметрии на TX16S нет.
Настройки по списку.
BRD_ALT_CONFIG to 1
RSSI_TYPE to 3
SERIAL7_OPTIONS to 15
SERIAL7_PROTOCOL to 23
NO NEED to touch RC_OPTIONS from the default value of 0
Всем здравствуйте, я в коптеростроительстве новичок, построил трикоптер, контроллер apm 2.8, прошивка 3.21», выполнил первоначальные настройки. Регуляторы и сервопривод подсоединил по общепринятой схеме. То есть регуляторы в 1,2 и 4 выходы а серву в 7. Проблема в том что при движении стика рысканья серва молчит. Хотя при подключении питания вздрагивает. Серву менял, не помогает.
В общем то ли я такой тупой, то ли незнаю. Серва у меня не двигается потому что каждый раз при подключении питания apm запускается и регуляторы пищат. Я так понимаю это режим калибровки регуляторов.
Регуляторы калибрую в все вместе, как по инструкции, сразу после калибровки радиоаппаратуры. Далее стик газа на минимум и отсоединяем батарею. Но стоит мне потом снова ее подключить как регуляторы снова начинают пищать. Далее подключаюсь к usb и если попытаться заармить в мишн планнер то в левом верхнем экране появляется сообщение prearm: RC not calibrated. Может кто объяснить что я делаю не так?
Регуляторы и должны “пищать” каждый раз при подключении акб. другое дело - КАК они пищат. Если количество писков соответствует количеству банок Вашего акб то это инициализация акб регуляторами и это нормально. А вот если они постоянно часто пищат то это регуляторы не откалиброваны. Тогда вытекает следующее - неизвестно какие у Вас регуляторы. Если банальные аля симонк или бихели-с то их калибруют по мурзилке. А вот если у вас бихели-32 то их калибруют по проге своей. prearm:RC not calibrated (радио контроль не откалиброван) вообще то не имеет отношение к тому КАК откалиброваны или вообще откалиброваны ваши регули. Это сообщение о том что Ваш полетник не откалиброван по радиоаппаратуре. Проще Вы не прошли или у Вас не получилось настроить правильно пункт Radio Calibration. Читайте, вникайте, калибруйте.
ПС. Еще не маловажно чтобы вот эти значения 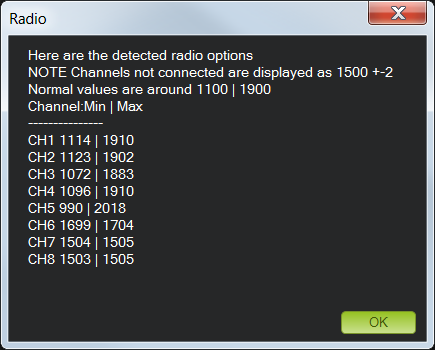 для рабочих-задействованных апой каналов были для минимума чуть выше 1000 (примерно 1010) а для максимума чуть меньше 2000 (примерно1990) Я так себе ставлю, хотя мурзилка рекомендует + или - 100 от значений. О чем Вас и предупреждает текст на картинке. К слову даже на картинке из мурзилки далеко не идеал. В идеале ВСЕ значения мин и все значения мах на всех каналах должны быть одинаковыми. (конечно это в идеале, в жизни мало кто так заморачивается). Если у Вас получается намного другие значения то Вам нужно подгонять (изменять) регулировки на самой апе а потом еще раз заново калибровать полетник в разделе Radio Calibration.
для рабочих-задействованных апой каналов были для минимума чуть выше 1000 (примерно 1010) а для максимума чуть меньше 2000 (примерно1990) Я так себе ставлю, хотя мурзилка рекомендует + или - 100 от значений. О чем Вас и предупреждает текст на картинке. К слову даже на картинке из мурзилки далеко не идеал. В идеале ВСЕ значения мин и все значения мах на всех каналах должны быть одинаковыми. (конечно это в идеале, в жизни мало кто так заморачивается). Если у Вас получается намного другие значения то Вам нужно подгонять (изменять) регулировки на самой апе а потом еще раз заново калибровать полетник в разделе Radio Calibration.
ППС. Многие забивают на это и летают “как получилось”. Но рано или поздно это сыграет злую шутку с вашим пепелацем и как следствие с Вашим карманом и нервами.
Мои регуляторы как раз таки пищат постоянно часто. Если подключить каждый регуль отдельно к приемнику, то все калибруется как положено, но стоит регуляторы подключить к APM - начинают все три пищать как перед калибровкой.
Я где то читал, что может на это влиять инвертирование каналов управления. Так вот, у меня максимум газа когда стик газа опущен вниз, понимаю логически что это неправильно, но переключатели на пульту, что отвечают за инвертирование переключены на norm. Аппаратура у меня старенькая 4х канальная 40 mhz, это не может каким то образом влиять?
Аппаратура у меня старенькая 4х канальная 40 mhz
я бы выкинул этот хлам 😃
я бы выкинул этот хлам 😃
Ну решили попробовать из того что есть, пекорды ставить на этой аппе я не собираюсь, а после нового года уже купить нормальную аппаратуру.
старенькая 4х канальная
ардукоптеру надо минимум 5 каналов
Мои регуляторы как раз таки пищат постоянно часто. Если подключить каждый регуль отдельно к приемнику, то все калибруется как положено, но стоит регуляторы подключить к APM - начинают все три пищать как перед калибровкой.
Я где то читал, что может на это влиять инвертирование каналов управления. Так вот, у меня максимум газа когда стик газа опущен вниз, понимаю логически что это неправильно, но переключатели на пульту, что отвечают за инвертирование переключены на norm. Аппаратура у меня старенькая 4х канальная 40 mhz, это не может каким то образом влиять?
вам уже ответили почему стоит выкинуть этот хлам. Если вы еще раз продублируете сообщение то лучше от этого никому не станет
Есть плата matek f405std. Хочу подключить к ней сонар и леды. Сонар должен подключаться к 5 и 6 PWM. Как узнать их GPIO? Или куда подключить Echo и Trigger от сонара, что-б он заработал?
Аппаратура у меня старенькая 4х канальная 40 mhz, это не может каким то образом влиять?
Похоже это основная причина по которой у Вас нормального ничего не получится. АПМ нужно минимум 5 каналов. 4 канала на управление направлением полета и 1 канал на выбор режима полета. У Вас 4 канала - как не крути(переназначая функции на апе) а 1 канала не хватает. Отсюда и сообщение prearm:RC not calibrated. Отсюда и писк ESC, скорее всего. Контроллер просто не проходит всех проверок и сообщает Вам про это. Допустим Вы сможете отключить в листе преарма все мешающие функции типа проверки апы, еsc… но у Вас останется вопрос по выбору режима полета. Конечно можно летать только в одном режиме, допустим стабилайз. Но это гемор и чрезвычайно неудобно. Тем более что АРМ это не тот контроллер который “полетит из коробки”. Вам потребуется еще как минимум один канал для настройки пидов и тюна. Меняйте аппаратуру на 8 канальную и будет Вам счастье а Вашему пепелацу полет.
Есть плата matek f405std. Хочу подключить к ней сонар и леды. Сонар должен подключаться к 5 и 6 PWM. Как узнать их GPIO? Или куда подключить Echo и Trigger от сонара, что-б он заработал?
github.com/ArduPilot/ardupilot/blob/…/hwdef.dat
# PWM out pins. Note that channel order follows the ArduPilot motor
# order conventions
PC6 TIM3_CH1 TIM3 PWM(1) GPIO(50)
PC7 TIM8_CH2 TIM8 PWM(2) GPIO(51)
PC8 TIM8_CH3 TIM8 PWM(3) GPIO(52)
PC9 TIM8_CH4 TIM8 PWM(4) GPIO(53)
PA15 TIM2_CH1 TIM2 PWM(5) GPIO(54)
PA8 TIM1_CH1 TIM1 PWM(6) GPIO(55)
подскажите пожалуйста, какая плата сейчас лучше всего для коптера ?
имеет смысл ставить Kakute с виброразвязкой датчика - или для арду это баловство и на качестве полета не сказывается ?
также - кроме ограничения по памяти и дополнительных портах - есть преимушество у F7 процесорных контроллеров перед F4 ?
или математика не настолько замороченая в арду и нет надобности в куче фильтров и F4 за глаза ?
спасибо
Конкретную плату не посоветую, но считаю что надо смотреть что то на F7, при чем Kakute не самый лучший вариант. Арду достаточно жирная прошивка и было бы не плохо иметь процессор с 2MB памяти. Тогда на арду будут работать всякие фишки типа скриптов, управление камерой по последовательному порту. У Kakute стоит процессор с 1MB флеш и не которые фишки арду на нем не работают.