А давайте обсудим Arducopter - APM

Выйдет из строя что то это точно, кто быстрее
Всем привет.
Сейчас двухосевой подвес подключен к приемнику.
Есть ли смысл подключать контроллер подвеса к APM?
Это дает какие-нибудь полезности?
Выйдет из строя что то это точно, кто быстрее
А тогда почему у него два питания подведено?
Два разных источника питания нельзя подключать параллельно
Два разных источника питания нельзя подключать параллельно
У него же подключено два питания по картинкам, разве не так? И у меня не два разных. Оба на LDO стабах.
Есть ли смысл подключать контроллер подвеса к APM?
Это дает какие-нибудь полезности?
Только Вам решать- дает или нет. У меня storm 32 подключен к pixhack по mavlink. Крутилкой произвольно меняется угол камеры по pitch в полете,в автомиссии отслеживание точки интереса.
ardupilot.org/…/common-cameras-and-gimbals.html
Это значит нет смысла запитывать с другой стороны? У меня апм питается и ГПС больше ничего. На входи 5.3в, а на выходе к gps 5в. Ниже не падает. Смысл вставлять в другое гнездо, если там и там Диод стоит??!
Короче идея с двумя источниками питания на mini APM PRO нужна для резервирования питания.
Сгорит один бек - контроллер будет работать по идее от второго… ну или сервы в таком случае еще можно питать сразу от выхода APM -а.
Чтобы ничего не сгорело они и поставили диоды Шоттки.
Надо кстати затестить попробовать эту самую схему резервирования питания.
Оторвать основное питание и посмотреть, будет ли оно работать через резервное.
А понять, нужно ли второе питание можно посмотрев логи полета, а конкретнее параметр VCC. Очень плохо, если он подходит ближе к 4.5В. Пишут, атмега может сгореть при таком напряжении, ну или по крайней мере перезагрузится, что закончится естественно крашем.
Кстати подскажите кто знает. По этому посту почему именно в S8 была подключена телеметрия, а не в родной вход и у него два бека подключено, что ли?
От телеметрии в S8 подключен +, ну и земля может быть. Rx, Tx подключены штатно
Всем привет.
Сейчас двухосевой подвес подключен к приемнику.
Есть ли смысл подключать контроллер подвеса к APM?
Это дает какие-нибудь полезности?
Я подключил и горизонт перестал заваливаться
Чтобы ничего не сгорело они и поставили диоды Шоттки.
Надо кстати затестить попробовать эту самую схему резервирования питания.
Оторвать основное питание и посмотреть, будет ли оно работать через резервное.
Я сделал себе так же все нормально вроде бы и ничего не сгорело. А телеметрия в канал G8 подключен из-за того, чтобы снять нагрузка на магистраль к процу. По очереди отключал беки апм работает, а значит дубликаты работают.
Да вроде проблем не было, у тебя на программаторе какая скорость стоит?
Парни. Кто крепил APM к 450 раме на двусторонний вспененный скотч? Как оно? Хочется убрать APM внутрь между пластинами.
я крепил на пару слоев
без замечаний
Прошивка АРМ 2.6 - 3.2.1 Arducopter
Версия МР - 1.3.41, пробовал на 1.3.44
Для замера напряжения второй батареи (видео, подвес) сделал сенсор по дневнику Козина.
На выходе сенсора - 4.75 В.
Сенсор подключил на А3 АРМ.
bat_volt2_pin = 3
bat_volt2_mult = 2.54
Но во flight data МР, в разделе статус - battery_voltage2 = 0
На пине А2 подключен блок питания Козина и при bat_volt2_pin = 2
battery_voltage показывает нормально.
Пробовал менять их местами. Всё тоже самое.
Такое ощущение, что значение переменной bat_volt2_pin присваивается, но в прошивке оно не используется.
Кто выводил напряжение второй батареи? Как решали проблему?
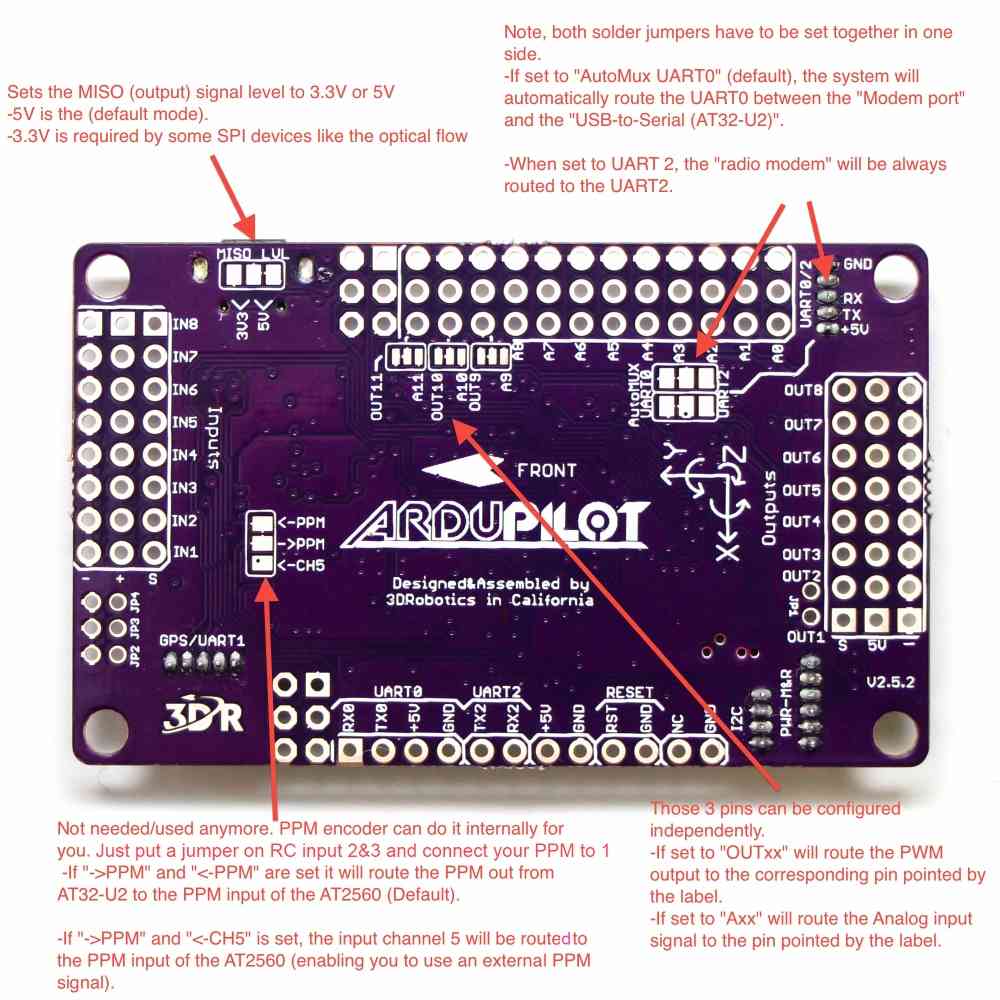
Кто может, относительно конкретного использования, объяснить для чего нужны все эти перемычки. Что они переключают понятно. Непонятно - зачем?
Кроме Ппм.
А зачем через 2 монитор?
И 1 при этом подключен?
B чём разница между apm 2.5,2.6 и 2.8?
B чём разница между apm 2.5,2.6 и 2.8?
Магией цифр.
А если серьезно. Разницу надо читать в описании к конкретной модели, т.к. каждый производитель может вносить свои изменения.
2.5 с компасом, 2.6 без компаса а 2.8 не помню чем отличается, это уже где то обсуждалось и не раз.
2.5 с компасом, 2.6 без компаса а 2.8 не помню чем отличается, это уже где то обсуждалось и не раз.
2.8 отличается наличием MUX разъема и более надежным стабилизатором напряжения для CPU. Так же есть компас на плате, но его можно отключить.
Всем привет!
Курил долго интернеты, в русскоязычной части инфы не нашёл … APM как я понимаю более не поддерживается? … т.е. последняя прошивка на неё (для коптера) 3.2.1? … кто-нибудь знает причину?
Я начитал в забугорье, что вроде как папяти у AtMega2560 стало не хватать …
В новых версиях прошивки есть интересные фишки, например ground effect compensation и пр. … может мне кто-либо подсказать, можно-ли прошить её свежей прошивкой и чем это чревато?.. на какой тогда контроллер переходить?😃
Всем привет!
Курил долго интернеты, в русскоязычной части инфы не нашёл … APM как я понимаю более не поддерживается? … т.е. последняя прошивка на неё (для коптера) 3.2.1? … кто-нибудь знает причину?Я начитал в забугорье, что вроде как папяти у AtMega2560 стало не хватать …
В новых версиях прошивки есть интересные фишки, например ground effect compensation и пр. … может мне кто-либо подсказать, можно-ли прошить её свежей прошивкой и чем это чревато?.. на какой тогда контроллер переходить?😃
По идее Вы сами на все ответили!
У апм последняя 3.2.1!
Из следующих pixhawk, px4 подобные, вроде нечего pixhack, из нового pixhawk 2 скоро выйдет.
Сам летаю на f4by.
т.е. последняя прошивка на неё (для коптера) 3.2.1? … кто-нибудь знает причину?
Сами же ответили.
памяти у AtMega2560 стало не хватать …
на новые фишки.
можно-ли прошить её свежей прошивкой
Нет, если только сами не сделаете прошивку, выкинув лишнее и ужав до памяти Меги.
на какой тогда контроллер переходить?
32 битные. На F4BY или на пикс и подобные (если сумеете выбрать из всего многообразия пиксов).
32 битные. На F4BY или на пикс и подобные (если сумеете выбрать из всего многообразия пиксов).
А что вообще можете посоветовать? … ценники на них ооой какие)))) пикс 2.4.7 вижу сейчас вроде как в почёте (по поводу многообразия не понял … их что, много?))))))))))
А что вообще можете посоветовать?
У меня F4BY (кстати и ценник на него считаю человеческий). Пиксы меня не устраивают, поэтому советовать не могу. Может кто другой расскажет.
(по поводу многообразия не понял … их что, много?))))))))))
Только что часть перечислили.
Из следующих pixhawk, px4 подобные, вроде нечего pixhack, из нового pixhawk 2 скоро выйдет.
а еще пиксрейсер, мини и т.д.
а еще пиксрейсер, мини и т.д.
Мде … понял, в общем летать мне пока на АПМ, учиться, тренероваться =)))))
А если не секрет, чем пиксы-то не устраивают?.. хочу увидеть полноту картины т.к. ооочень многие их сильно хвалят и лишь некоторые ругают (глюки какие-то, на морозе барахлят - вот всё, что я нашёл) … при этом им тут же возражают, мол в -20 летал отлично …