Интелектуальный , умный и независимый подвес камеры? Реально!

Про люфты. Механизм упирается в редуктор только при высоких ускорениях. Причем упирается через упругий элемент и это уже не жесткий толчек, а легкое отклонение с плавным наростанием усилия. В обычной работе редуктор “убегает” от нагрузки при обнаружении минимального усилия. На всех звеньях редуктора еще не успевает возникнуть напряжения, как мотор уже уводит его. Если цепляться к мелочам, то бесколлекторный мотор тоже работает с толчками, ведь силу трения стояния никто не отменял, а ее превышение требует заданного минимального уровня силы. Если поставить себе такую задачу, то сила трения стояния может быть измерена по каждой оси в подвесе и с загрязнением и деформацией будет ухудшаться. У Force Servo есть обратная связь по фактической силе, а у бесколлекторника нету.
Объяснение принято, и действительно трение покоя будет мешать и в БК прямом приводе (сейчас многие начинающие подвесостроители сталкиваются с этим но в силу слабого понимания принципов работы, не могут найти истинную причину проблем с настройкой). Но все таки, тут у прямого привода несомненное преимущество - магнитное поле можно “развернуть” очень быстро даже на большой угол, гораздо быстрее чем отработает редуктор. Ведь это логично, редуктор реализует прнцип рычага: если мы выигрываем в силе - проигрываем в расстоянии, при одинаковом подводимом усилии.
Объяснение принято, и действительно трение покоя будет мешать и в БК прямом приводе (сейчас многие начинающие подвесостроители сталкиваются с этим но в силу слабого понимания принципов работы, не могут найти истинную причину проблем с настройкой). Но все таки, тут у прямого привода несомненное преимущество - магнитное поле можно “развернуть” очень быстро даже на большой угол, гораздо быстрее чем отработает редуктор. Ведь это логично, редуктор реализует прнцип рычага: если мы выигрываем в силе - проигрываем в расстоянии, при одинаковом подводимом усилии.
Еще недавно авторитеты хобби-видео использовали сайн-стар подвесы с мощными сервами и ременным приводом с дополнительным понижением 1/5 и более. Это не считали медленным (типа от 0,5 до 1,0 сек/60градусов) .
Вы правы, конечно редуктор замедляет реакцию.
Вопрос в том, какая скорость уже является избыточной.
Вот пример полета пилотажного вертолета. Вращением управляет и стабилизирует редукторная серва. Мультикоптер с его пропеллерами фиксированного шага никогда не будет так крутится.
Микро вертолеты вращаются еще быстрее. Скорости редукторных серв хватало. Проблема была в том, что они работали слишком “жестко”, что бы получать качественное художественное видео.
У F-Servo тоже много моментов и в механике и в электронике, которые можно изменять и добиваться лучшего результата. Фронт работ очень большой. Кроме скорости редуктора еще надо подбирать оптимальную скорость наростания усилия (механика), ПИД настройки контроллера (электроника)… Это все задача разработчика. А пользователь должен получить готовое решение, которое остается только привинтить и подключить. Как и обычная серва, тут не будут требоваться сложные настройки через компьютерный интерфейс, правильные решения уже будут реализованы в готовом изделии (как в Position Servo). Просто подключил и все крутится.
У F-Servo тоже много моментов и в механике и в электронике, которые можно изменять и добиваться лучшего результата. Фронт работ очень большой. Кроме скорости редуктора еще надо подбирать оптимальную скорость наростания усилия (механика), ПИД настройки контроллера (электроника)… Это все задача разработчика. А пользователь должен получить готовое решение, которое остается только привинтить и подключить. Как и обычная серва, тут не будут требоваться сложные настройки через компьютерный интерфейс, правильные решения уже будут реализованы в готовом изделии (как в Position Servo). Просто подключил и все крутится.
А есть уже готовое решение в реализации?.
Сервы или БК - тут все в равенстве. При подъеме тяжелой аппаратуры в воздух лично до сих пор предпочтение сервам отдаю…вес. БК только если вес во главу не ставится.
Охренеть…вставать скоро , а мы и не ложились.😦
Правильно,просмотр,изучение и анализ собранной информации требует времени.
А есть уже готовое решение в реализации?.
На бзе Эцилопа это реализовалось достаточно просто.
ecilop.com/shop/ecilop_easy.phtml
ecilop.com/shop/fs-upgrade.phtml
На базе Эцилопа это реализовалось достаточно просто.
Меня интересует более приземлённый вариант.Возможно ли использовать Вашу разработку в этой конструкции вместо двух звеньевой механической руки.Для компенсации вертикальных колебаний.
www.youtube.com/watch?v=3dpS_qxNTDc
\\\ Спасибо. Промблему с вертикальными колебаниями обсуждаем на этой ветке.Пока что готового решения нет.rcopen.com/forum/f123/topic317383/1201
Меня интересует более приземлённый вариант.Возможно ли использовать Вашу разработку в этой конструкции вместо двух звеньевой механической руки.Для компенсации вертикальных колебаний.
www.youtube.com/watch?v=3dpS_qxNTDc
\\\ Спасибо.
Использовать можно. Я пока не готов сказать, когда будет коммерческое решение для таких девайсов.
Сам именно такой девайс теперь и проектирую. Хотя, не совсем такой. На вашем примере есть странности:
Во первых сказано про 5 осей, но осей только три.
Во-вторых последовательность осей стабилизации не правильная.
На этом примере поворачивая камеру вниз, ось стабилизации бокового крена пропадает и остается только две оси.
Когда говорят о четырех или пяти осях, то имеется ввиду устранение проблемы “gimbal lock” , по русски, видимо - блокировка кардана. У этих ребят блокировка кардана лишь усугубляется неверной очередностью осей.
Вот мой давний пример с четырьмя осями. Если добывать ось для “декоративного” наклона вбок, то будет пять осей. И проблемы Gimbal lock нету и направляй куда-угодно. Только на оси выравнивания теперь F-servo ставить вместо резинок и двойного сервопривода сверху.
Здесь на риге почти аналогичная последовательность расположения осей \\\ photoshipone.com/phoenix-brushless-drive-gimbals/ \\\ За две остальные оси в приведённом примере видно считают механическую руку.
Здесь на риге почти аналогичная последовательность расположения осей \\\ photoshipone.com/phoenix-brushless-drive-gimbals/ \\\ За две остальные оси в приведённом примере видно считают механическую руку.
Ребят из photoshipone я тролил по поводу очередности осей несколько лет назад, когда они стали повторять популярное тогда решение с замкнутым кольцом вращения вокруг камеры. Теперь это можно вспоминать как пример изменчивой моды на популярные решения для стабилизации камеры 😃
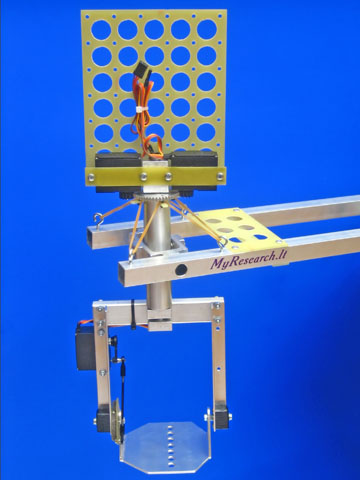
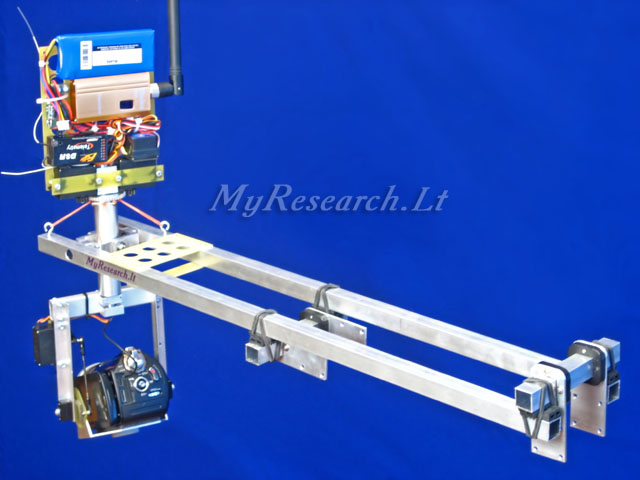
Это еще один тест стабилизируемой платформы для камеры.
Вращаемая масса - 10кг.
Force Servo + контроллер ZYX-GS V1.2.
Повторяемость позиции - 10 минут.
При раскачивании основы отклонения платформы находились в пределах 1 градуса.
Шумы на уровне 1 секунды.
Совершенствование продолжается.
Всего за несколько дней точность работы прототипа была улучшена на порядок. А на январь анонсирована демонстрация полноценного подвеса для видеокамеры. (Видео прежнего теста заменено)
анонсирована демонстрация полноценного подвеса для видеокамеры.
Алексей, где и конкретно когда это будет происходить?
Алексей, где и конкретно когда это будет происходить?
Планирую просто выпустить видео. А по мероприятиям и выставкам пока еще плана нет.
Планирую просто выпустить видео
А мы уже жребий предновогодний чуть не розыграли , бумажки накрутили - кому ехать:)
еще плана нет.
А зря. Работы ваши интересные и многообещающие. до сих пор часто сервоподвесы ставим, когда полет.время в узкие рамки вес загоняет
Пружины, это бюджетно и наглядно, но не лучшее в данном случае.
Если бы нам всем знать, где и в чем это самое точное, прочное, надежное, оптимальное, а значит и самое лучшее. Спираль эволюций такого не знает. Следовательно, решений будет еще тьма. И каждому из них свое время.
Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода. Просто более доходчивая форма, нежели на словах:
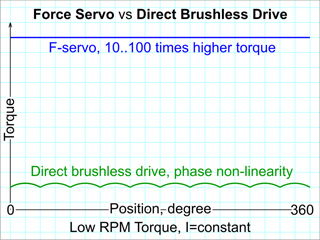
Суть в более высокой энергетической эффективности при меньшем весе и размере, а так же отсутствие нелинейности.
а так же отсутствие нелинейности.
А нелинейность и усталость пружин?
А нелинейность и усталость пружин?
- У меня несколько прототипов и пружины - не единственный вариант.
- Нелинейность при изменении плеча воздействия пружины не связана с цикличностью, как это есть в прямом приводе.
- Нелинейность в муфте компенсируется линеаризацией в контроллере, и при этом положение платформы относительно основы не имеет значения.
- Если вы вспомнили об усталости пружин, то надо вспомнить о размагничивании магнитов в бесколлекторнике и об изменении параметров при нагревании обмоток.
А линейность по растяжению или сжатию обычной пружины как раз сохраняется, там для расчета используется линейная функция N/mm.
Сделал наглядное сравнение по крутящему моменту для сервопривода силы и прямого бесколлекторного привода.
Интересно как с такими пульсациями крутящего, БК привод движется плавно и без рывков и без массы как у Вас 10кг которая сильно стабилизирует, на видео всё бы всплыло, похоже гарфик не от этих моторов. Да и результаты пока в пользу БК привода.
то надо вспомнить о размагничивании магнитов в бесколлекторнике
Не знаю о каких магнитах речь, годами лежат и работают без потери свойств.
об изменении параметров при нагревании обмоток
А у Вас сервы без магнитов и обмоток?