Интелектуальный , умный и независимый подвес камеры? Реально!

Есть тема по Тароту, там и спрашивайте БК система из коробки- встречаем Тarot
Спасибо!!!
Всем привет, я купил плату multiwii 328P
сейчас я хочу из нее сделать стэдикам
исполняющие механизмы - сервоприводы
Цель всего проекта - научится обращаться с подобными девайсами.
Я немного пишу на асме для AVR - но очень немного.
Я понимаю, что это здесь совсем не понадобится, это я к тому, что немного шарю в программировании.
Есть куча вопросов… Надеюсь на Вашу помощь и подсказки…
я уже читал multiwii faq - спасибо автору!
В данный момент, я еще не менял прошивку
Если я правильно понимаю, то стэдикама нужно выбрать GIMBAL ?
Что делать потом?
- К каким контактам подключать сервоприводы?
К контактам cam pitch, cam rol, cam trig? Или это контакты для подключения подвеса? и в режиме GIMBAL нужно подключаться к контактам управления моторами? - Обязательно ли использовать аппаратуру р/у - то-есть нужно ли подключать приемник или можно запустить без него?
- Как потом запустить эту плату? Нужна ли какая ни-будь калибровка?
Кому не сложно объясните пожалуйста на пальцах. Заранее Вам спасибо большущее.
К контактам cam pitch, cam rol,
2.нет
3. да
дак, по идее, тогда можно и на стоковой прошивке сделать стэдикам?
Но я вчера пробовал, у меня ни чего не получилось…
Я включил в гуи камстаб. подключил сервоприводы, подключил питание, но увы…
не камстаб… вам нужно сконфигурировать вия как гимбал
сейчас я хочу из нее сделать стэдикам исполняющие механизмы - сервоприводы
Сервоприводы для стэдикама - не лучший айс. Лучше и точнее на безколлекторных моторах .
не камстаб… вам нужно сконфигурировать вия как гимбал
В смысле сконфигурировать мултивий как гимбал?
Это я вроде уже понял… А что дальше?
И еще вопросик:
А если оставить стоковую прошивку ( она вроде под “+” коптер сконфигурирована )
то камера в подвесе подключается к этим-же контактам
только вот нужно включить камстаб.
Или при таком раскладе плата без приемника не запустится???
Лучше и точнее на безколлекторных моторах
Еще раз повтрюсь: Цель этого проекта - научиться… Понять как все это работает… А дальше уже буду делать то, что лучше.
Да и бесколекторных моторов у меня сейчас для этого нет…
[QUOTE=uwrtey;4563632
Еще раз повтрюсь: Цель этого проекта - научиться… Понять как все это работает… А дальше уже буду делать то, что лучше.
Да и бесколекторных моторов у меня сейчас для этого нет…[/QUOTE]
Тогда Вам сюда,я сам начинал разработку с этой схемы.Для устранения люфтов по две сервы на ось. myresearch.lt/blog/servo180/servo180_ru.phtml
Спасибо, полезный сайт. Но к сожалению с мультивий его ни чего не связывает…
меня же больше интересует программная часть мультивия…
Я дал ссылку на механику,исполнительных механизмов.В профессиональных гиростабилизированных головах для телекамер тоже используют по ДВА двигателя на ось чтобы не было выбега по инерции,а также компенсируются люфты.По программной части к сожалению я весьма далёк.Желаю удачи в дальнейших разработках.
Спасибо большое.
По программной части к сожалению я весьма далёк.
А как Вы настраивали свой стабилизатор?
Я его собирать не стал,после прочтения дневника Алексея Москаленко про подвесы на БК двигателях.Поняв всю бесперспективность этой затеи.В итоге сервы подарил другу(он увлекается бытовой автоматикой).Приобрёл БК двигатели 4830,сейчас перематываю.А также контроллер от Алексея.Потихоньку собираю свой стедик.
Сервоприводы для стэдикама - не лучший айс. Лучше и точнее на безколлекторных моторах .
Есть и другое мнение.
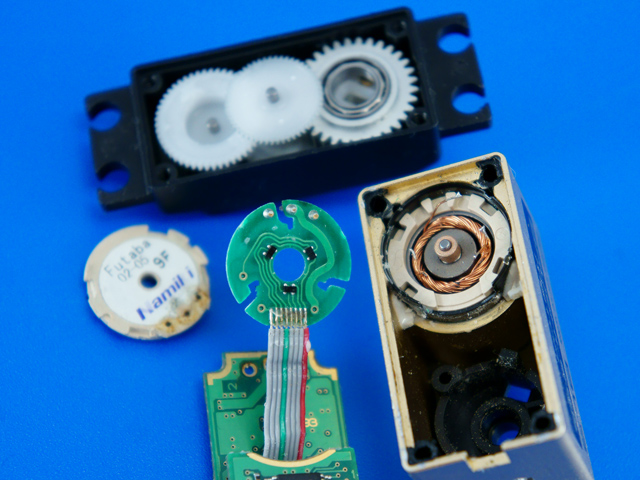
Популярные сегодня безколлекторные и безредукторные приводы очень не эффективны. Так выглядит устройство эффективного бесколлекторного сервопривода (Futaba BLS251):
Сравнение:
Альтернатива:
Проект Force Servo
Еще пару видео в разделе стэди-коптера: rcopen.com/forum/f123/topic269364/381
Похоже на шаговый двигатель, только не понятно зачем там датчики Холла…
ну да ладно…
И все таки есть те, кто сможет помочь с настройкой платы мультивия ?
Есть и другое мнение.
Популярные сегодня безколлекторные и безредукторные приводы очень не эффективны. Так выглядит устройство эффективного бесколлекторного сервопривода (Futaba BLS251):
Столько секаса работы проделано, а горизонт все равно плавает
Столько
секасаработы проделано, а горизонт все равно плавает
Изучают фотографы технические вопросы, изучают, а все равно путают функцию сервопривода с функцией контроллера.
Повышая крутящий момент и увеличивая жесткость упругого элементы можно снизить фактор влияния воздушных потоков и изгибающихся проводов. При этом движение камеры будет более похоже на манипулятор робота. Ослабляя влияние привода движения получаются более художественными. Там, где требуется теле-съемка камеру закрывают внешним корпусом от воздушных потоков. Ну, и конечно, остается еще один момент - алгоритмы контроллера. Для художественных съемок (по моему мнению) идеально подходит один только гироскоп, без датчиков горизонта. В режиме Heading Hold получается очень хороший результат. Но возможен медленный дрейф.
Похоже на шаговый двигатель, только не понятно зачем там датчики Холла…
улыбнуло
Изучают фотографы технические вопросы, изучают, а все равно путают функцию сервопривода с функцией контроллера.
Алексей, здесь людям не слова нужны, а картинка. Я из видео пока не вижу преимущества настолько сложной системы. У подвесов прямого привода есть неоспоримый плюс - простота конструкции.
Кому не сложно, помогите советом…
Есть плата multiwii 328P
- Её можно прямо через юсб шить? если так, то какой программатор выбирать из списка?
- как из этой платы сделать стэдикам? ( без аппаратуры управления )
я уже понял, что ее нужно перепрошить в режим GIMBAL.
А как все остальное настроить? ( датчики и т.д. ) - Датчики на плате встроенные - какую плату выбирать из того списка ? miniwii ?
- Что еще нужно настроить?
- как запустить плуту если не используется аппаратура управления ?
Начинать нужно с чтения и изучения азов и основ. А так похоже на ситуацию “…Хочу лететь на Марс!!! Лететь нужно срочно!!! Прямо завтра утром…Что для этого нужно и как все это сделать?..”😃
Топтун, не глумитесь! Объясните пожалуйста что Вас улыбнуло?
По сервам поищи инфу на этом форуме ,они долго с ними работали. www.multicopter.ru/forum/viewtopic.php?f=9&t=1304&…