Интелектуальный , умный и независимый подвес камеры? Реально!

не камстаб… вам нужно сконфигурировать вия как гимбал
сейчас я хочу из нее сделать стэдикам исполняющие механизмы - сервоприводы
Сервоприводы для стэдикама - не лучший айс. Лучше и точнее на безколлекторных моторах .
не камстаб… вам нужно сконфигурировать вия как гимбал
В смысле сконфигурировать мултивий как гимбал?
Это я вроде уже понял… А что дальше?
И еще вопросик:
А если оставить стоковую прошивку ( она вроде под “+” коптер сконфигурирована )
то камера в подвесе подключается к этим-же контактам
только вот нужно включить камстаб.
Или при таком раскладе плата без приемника не запустится???
Лучше и точнее на безколлекторных моторах
Еще раз повтрюсь: Цель этого проекта - научиться… Понять как все это работает… А дальше уже буду делать то, что лучше.
Да и бесколекторных моторов у меня сейчас для этого нет…
[QUOTE=uwrtey;4563632
Еще раз повтрюсь: Цель этого проекта - научиться… Понять как все это работает… А дальше уже буду делать то, что лучше.
Да и бесколекторных моторов у меня сейчас для этого нет…[/QUOTE]
Тогда Вам сюда,я сам начинал разработку с этой схемы.Для устранения люфтов по две сервы на ось. myresearch.lt/blog/servo180/servo180_ru.phtml
Спасибо, полезный сайт. Но к сожалению с мультивий его ни чего не связывает…
меня же больше интересует программная часть мультивия…
Я дал ссылку на механику,исполнительных механизмов.В профессиональных гиростабилизированных головах для телекамер тоже используют по ДВА двигателя на ось чтобы не было выбега по инерции,а также компенсируются люфты.По программной части к сожалению я весьма далёк.Желаю удачи в дальнейших разработках.
Спасибо большое.
По программной части к сожалению я весьма далёк.
А как Вы настраивали свой стабилизатор?
Я его собирать не стал,после прочтения дневника Алексея Москаленко про подвесы на БК двигателях.Поняв всю бесперспективность этой затеи.В итоге сервы подарил другу(он увлекается бытовой автоматикой).Приобрёл БК двигатели 4830,сейчас перематываю.А также контроллер от Алексея.Потихоньку собираю свой стедик.
Сервоприводы для стэдикама - не лучший айс. Лучше и точнее на безколлекторных моторах .
Есть и другое мнение.
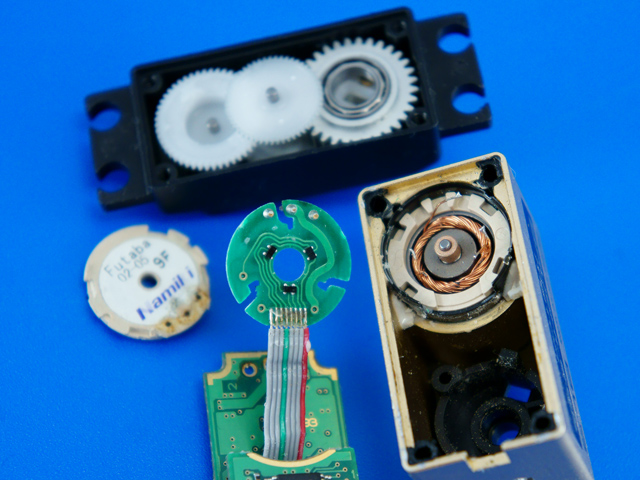
Популярные сегодня безколлекторные и безредукторные приводы очень не эффективны. Так выглядит устройство эффективного бесколлекторного сервопривода (Futaba BLS251):
Сравнение:
Альтернатива:
Проект Force Servo
Еще пару видео в разделе стэди-коптера: rcopen.com/forum/f123/topic269364/381
Похоже на шаговый двигатель, только не понятно зачем там датчики Холла…
ну да ладно…
И все таки есть те, кто сможет помочь с настройкой платы мультивия ?
Есть и другое мнение.
Популярные сегодня безколлекторные и безредукторные приводы очень не эффективны. Так выглядит устройство эффективного бесколлекторного сервопривода (Futaba BLS251):
Столько секаса работы проделано, а горизонт все равно плавает
Столько
секасаработы проделано, а горизонт все равно плавает
Изучают фотографы технические вопросы, изучают, а все равно путают функцию сервопривода с функцией контроллера.
Повышая крутящий момент и увеличивая жесткость упругого элементы можно снизить фактор влияния воздушных потоков и изгибающихся проводов. При этом движение камеры будет более похоже на манипулятор робота. Ослабляя влияние привода движения получаются более художественными. Там, где требуется теле-съемка камеру закрывают внешним корпусом от воздушных потоков. Ну, и конечно, остается еще один момент - алгоритмы контроллера. Для художественных съемок (по моему мнению) идеально подходит один только гироскоп, без датчиков горизонта. В режиме Heading Hold получается очень хороший результат. Но возможен медленный дрейф.
Похоже на шаговый двигатель, только не понятно зачем там датчики Холла…
улыбнуло
Изучают фотографы технические вопросы, изучают, а все равно путают функцию сервопривода с функцией контроллера.
Алексей, здесь людям не слова нужны, а картинка. Я из видео пока не вижу преимущества настолько сложной системы. У подвесов прямого привода есть неоспоримый плюс - простота конструкции.
Кому не сложно, помогите советом…
Есть плата multiwii 328P
- Её можно прямо через юсб шить? если так, то какой программатор выбирать из списка?
- как из этой платы сделать стэдикам? ( без аппаратуры управления )
я уже понял, что ее нужно перепрошить в режим GIMBAL.
А как все остальное настроить? ( датчики и т.д. ) - Датчики на плате встроенные - какую плату выбирать из того списка ? miniwii ?
- Что еще нужно настроить?
- как запустить плуту если не используется аппаратура управления ?
Начинать нужно с чтения и изучения азов и основ. А так похоже на ситуацию “…Хочу лететь на Марс!!! Лететь нужно срочно!!! Прямо завтра утром…Что для этого нужно и как все это сделать?..”😃
Топтун, не глумитесь! Объясните пожалуйста что Вас улыбнуло?
По сервам поищи инфу на этом форуме ,они долго с ними работали. www.multicopter.ru/forum/viewtopic.php?f=9&t=1304&…
Алексей, здесь людям не слова нужны, а картинка. Я из видео пока не вижу преимущества настолько сложной системы. У подвесов прямого привода есть неоспоримый плюс - простота конструкции.
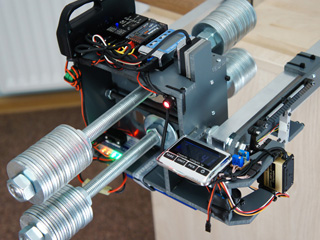
Вот пример (полетная масса 2650г, две камеры, оптический зум):
Вот фрагмент перевода страницы “Evolution”:
В 2012 году компания DJI представила подвес камеры с прямым приводом от бесколлекторного мотора. При отклонении от заданного положения на мотор подается напряжение для возврата в исходное положение. Так как редуктор отсутствует, то вращение камеры осуществляется без толчков. Двигатель без редуктора обеспечивает слабый крутящий момент и вращает камеру плавно. В 2013 году данное техническое решение было скопировано многими производителями и в значительной степени вытеснило иные технологии. Недостатки: Электрический мотор без редуктора обеспечивает слабый крутящий момент. Это означает, что необходимо применять крупные и тяжелые двигатели для вращения небольшой камеры. Это так же означает, что большая часть энергии идет не на вращение, а на нагрев обмоток. Это так же означает, что если нагрузка не сбалансирована по массе или по сопротивлению воздушному потоку, то мощности двигателя не хватит для противодействия. Из-за недостатка силы такой привод не пригоден для подвесов камер с противовесом. Другой недостаток – нелинейность крутящего момента. Фазовая нелинейность связана с циклическим смещением полюсов ротора и статора в двигателе. Вторая причина возможной нелинейности связанна с деформацией механизма или загрязнением подшипников.

В 2013 году компания MyResearch разработала и протестировала редукторный сервопривод с упругим элементом и датчиком силы (динамометром). Этот сервомеханизм не препятствует инерционному сохранению положения стабилизируемой платформы. При вращении камеры механизм опирается на нестабильную основу, но наклон этой основы не имеет значения. Преимущества нового сервопривода:
- Высокий крутящий момент, как у обычного сервопривода.
- Отсутствие нелинейности благодаря обратной связи через динамометр.
Это означает: а) меньший размер и вес, б) меньшее потребление энергии, в) возможность масштабирования и применимость для вращения тяжелых видеокамер, г) возможность применения на подвесах камер с противовесом, д) сохранение работоспособности при незначительном загрязнении механизма.
Выбор сервопривода для вращения и стабилизации видеокамеры.
Экспериментально установлено, что хорошая работоспособность обеспечивается при крутящем моменте сервопривода 1кг/см для платформы массой 500г. Скорость вращения сервомеханизма должна превышать возможную скорость раскачивания не стабильной основы. Короткие толчки с более высоким ускорением поглощаются упругим элементом в сервоприводе.
Текст писал я, он субъективен. Но если кто-то сможет обоснованно указать на несоответствия, то буду благодарен.
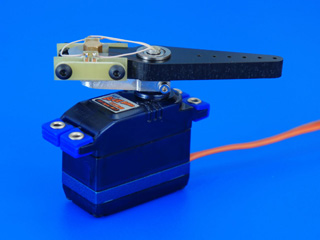
Прототип сервопривода со стандартным корпусом и креплением представлен, он так же прост в установке, как и обычная серва.
Столько
секасаработы проделано, а горизонт все равно плавает
Работы было много, но я еще не кончил.
От обычных серв отказались вовсе не потому, что они не могут поставить камеру в горизонтальное положение. Обычная серва может установить исполнительный орган в любое требуемое положение в соответствии с заданым сигналом. Горизонт - это не критерий оценки сервопривода.
Топтун, не глумитесь! Объясните пожалуйста что Вас улыбнуло?
Попытка угадать механизм.
Может здесь что нибудь полезное найдёшь. \\\ flydrones.ru/anons-tehnologii-force-servo-ot-my-re…
Просто у этого сервопривода обмотка расположена как у шагового двигателя.
Например регулятор холостого хода у автомобилей семейства ВАЗ выполнен так-же. Вот я и подумал, что в качестве мотора у этой сервы бесколлекторный ШД
но для меня осталось загадкой для чего ему три датчика Холла. Сейчас посидел, подумал и решил, что они для обратной связи - т.е. вместо переменного резистора. А датчик усилия там для линейности усилия… И вроде моя попытка угадать - удачна…😉
Просто у этого сервопривода обмотка расположена как у шагового двигателя.
Например регулятор холостого хода у автомобилей семейства ВАЗ выполнен так-же. Вот я и подумал, что в качестве мотора у этой сервы бесколлекторный ШД
но для меня осталось загадкой для чего ему три датчика Холла. Сейчас посидел, подумал и решил, что они для обратной связи - т.е. вместо переменного резистора. А датчик усилия там для линейности усилия… И вроде моя попытка угадать - удачна…😉
Там, где датчик холла, там магнитная муфта. По смещению определяется усилие.