Интелектуальный , умный и независимый подвес камеры? Реально!

Может здесь что нибудь полезное найдёшь. \\\ flydrones.ru/anons-tehnologii-force-servo-ot-my-re…
Просто у этого сервопривода обмотка расположена как у шагового двигателя.
Например регулятор холостого хода у автомобилей семейства ВАЗ выполнен так-же. Вот я и подумал, что в качестве мотора у этой сервы бесколлекторный ШД
но для меня осталось загадкой для чего ему три датчика Холла. Сейчас посидел, подумал и решил, что они для обратной связи - т.е. вместо переменного резистора. А датчик усилия там для линейности усилия… И вроде моя попытка угадать - удачна…😉
Просто у этого сервопривода обмотка расположена как у шагового двигателя.
Например регулятор холостого хода у автомобилей семейства ВАЗ выполнен так-же. Вот я и подумал, что в качестве мотора у этой сервы бесколлекторный ШД
но для меня осталось загадкой для чего ему три датчика Холла. Сейчас посидел, подумал и решил, что они для обратной связи - т.е. вместо переменного резистора. А датчик усилия там для линейности усилия… И вроде моя попытка угадать - удачна…😉
Там, где датчик холла, там магнитная муфта. По смещению определяется усилие.
ясно 😉
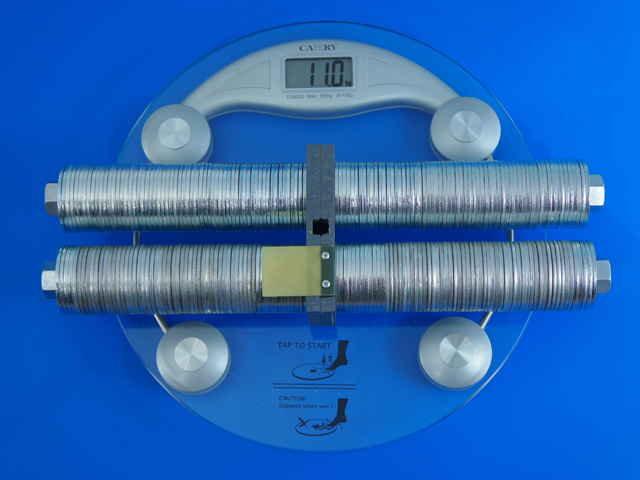
Я провел еще несколько испытаний.
Это стенд с вращаемой массой 11кг. Использована стандартного размера серва.

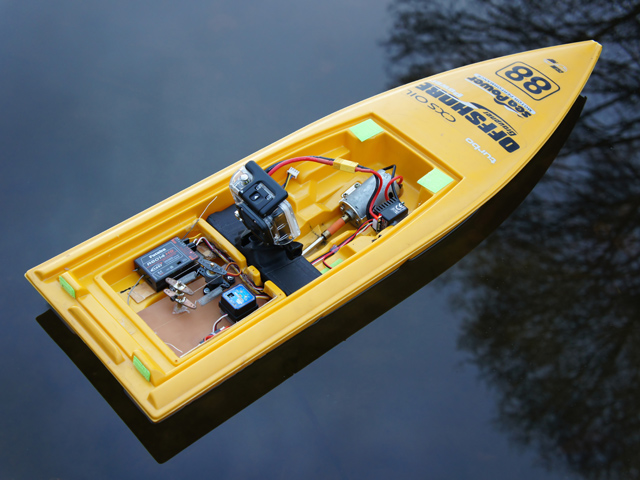
Force Servo так же применимы для рулевого управления. (офтоп. Если подскажете подходящую ветку, то тему рулевого управления надо будет перенести)
Это корабль с F-Servo рулевым управлением:

Подробности будут представлены на видео, которое я надеюсь скоро подготовить. Пока могу только сказать, что результаты положительные. Накапливается опыт по подбору копонентов настройке.
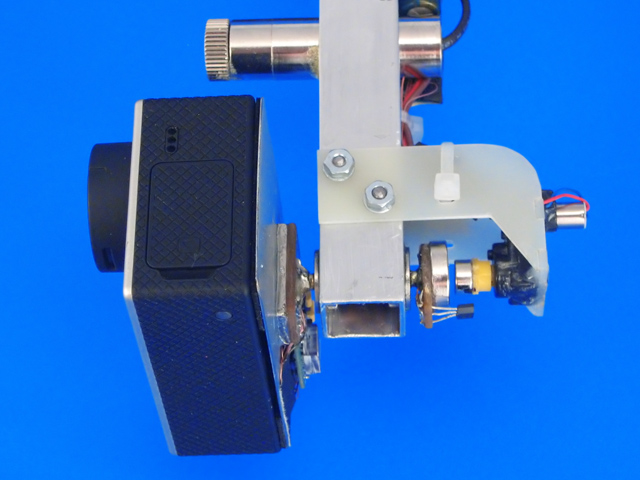
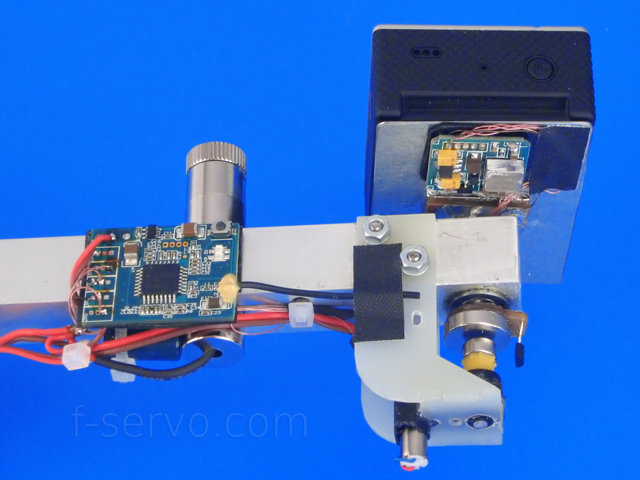
Какой требуется мотор, что бы стабилизировать и вращать камеру GoPro?
Вот такой:

Демонстрация работы устройства будет представлена скоро.
Для этого эксперимента я использовал сервомеханизм TGY-D1290.
Сперва я изготовил магнитную муфту с таким же крутящим моментом, как и у сервопривода - 0,35кг*см. Но оказалось, что во время стабилизации используется не более, чем 1/4 от максимальной тяги. Тогда я заменил один магнит в муфте на меньший магнит.
Величина крутящего момента, которого достаточно, чтобы стабилизировать и вращать камеру, зависит от точности балансировки и от величины трения в подшипниках.
В моем эксперименте для GoPro камеры было достаточно - 30г*см (мощность 40мВт), при запасе тяги до 90г*см.
Теперь замените меньший магнит на железку с трехфазной обмоткой, выкинье шестеренки и управляйте магнитным полем напрямую - и о чудо, получится безколлекторный привод 😃
Теперь замените меньший магнит на железку с трехфазной обмоткой, выкинье шестеренки и управляйте магнитным полем напрямую - и о чудо, получится безколлекторный привод 😃
Сперва из личного автомобиля выкиньте коробку передачь, увеличте двигатель и залейте по-больше бензина 😃 Ездить будет не эффективно, но зато с какой скоростью колеса крутить будет - реальная фишка 😃
Магнитная муфта даже в этом примере весит гораздо больше, чем мотор с редуктором. А ведь поле постоянного магнита гораздо сильнее, чем электрического в бесколлекторнике. Да и питания постоянный магнит не требует. Просто для такой легкой камеры проще сделать магнитную муфту, чем механизм с пружинами. А для крупных камер лучше ставить пружины и экономить вес.
З.Ы. Не сомневаюсь, что ваш контроллер положения прекрасно адаптируется к Force Servo. Хотя в этом примере используется один только гироскоп в режиме Heading Hold (этот прототип не знает, где горизонт, просто старается сохранять положение).
Величина крутящего момента, которого достаточно, чтобы стабилизировать и вращать камеру, зависит от точности балансировки и от величины трения в подшипниках.
Алексей, Ваши эксперименты это хорошо, но при правильной балансировке подвеса, для ГоПро хватает и мелких БК моторов.
Я использую 30граммовые моторы. На питч можно и в 2 раза легче ставить, т.к. мощи хватает с головой, и уменьшена в настройках в 2 раза от максимальной. Моторы нормально держат резкие виражи и акивный пилотаж. А экономичность я думаю здесь врядли кого то интересует, т.к. подвес потребялет ничтожно мало по сравнению с самим коптером.
Вот эксперементальный подвес товарища, у него моторы полегче моих. И крутящих моментов тоже достаточно.

Алексей, Ваши эксперименты это хорошо, но при правильной балансировке подвеса, для ГоПро хватает и мелких БК моторов.
Я использую 30граммовые моторы.
30 грамм на один мотор при массе камеры 77г.
Теперь мне актуальнее готовить решение именно для тяжелых камер.
Под профессиональную технику достойных подвесов пока просто нет.
Для киношной техники требуется расчет на нагрузку в 7 кг и более (для тех киношников, кто использует не минимальный вариант RED камер, а снимает, например, техникой ARRI).
Подготовить качественное коммерческое решение не так просто, это займет еще времени.
Любителей антиквариата я осуждать не стану.
Теперь мне актуальнее готовить решение именно для тяжелых камер.
Ну вот отсюда я думаю и стоит плясать, т.к. лишние 60 грамм для коптера под ГоПро не особо напряжно. Тут люди захотят простоту, без шестеренок и прочей сложной штуки. А вот для больших аппаратов стои заняться
Смастерил презентацию с русскоязычным текстом:
круто! искренне преклоняюсь перед Вашими талантами, Алексей!
Смастерил презентацию с русскоязычным текстом:
Шикарно. Как бы теперь эту историю в практическую плоскость перевести? И легкий подвес , под тяжелую камеру на них собрать.
Смастерил презентацию с русскоязычным текстом:
Отличная работа системы!. Отличная презентация!.Осталось за малым - воплотить в реальную конструкцию под средние и тяжёлые камеры.
Алексей, за презентацию и подробный рассказ спасибо. В общем-то преимущества force servo по сравнению с класическими очевидны. Но с БК нельзя так категорично сравнивать только в “плюс”. Есть и сравнительнные минусы. У вас несколько неточностей в заключениях, на мой взгляд.
-
“В Force Servo нет люфтов” - неверно, люфты никуда не делись. Исчезла жесткая связь с нагрузкой, но если быстро перекинуть усилие с “+” на “-” - люфты себя проявят. Возможно в вашей модели серво они минимальны, но это сказывается на ее цене. И даже самая лучшая механика со временем приобретает люфты. В подвесе все работа состоит в постоянной смене направлений приложения усилия, и люфты редукторов будут себя проявлять в вашем случае. Вы вышли из положения, повысив инерционность системы, тем самым сдвинув требуемый отклик исполнительного механизма в низкие частоты, где скорости отработки люфтов уже достаточно.
-
Использование разнесения грузов для повышения момента инерции - это конечно помогает стабилизации, и это решение проверенное временем. Но не забывайте, что улучшаются только две оси, а третья (которая параллельна штанге) сохраняет обычную инерцию, и для нее уже этим плюсом не воспользуешься. На летательных аппаратах, при правильной настройке мозгов, ось YAW и так прекрасно стабилизирована. А вот в ручном применении - уже нет. Ну и ещё один существенный минус штанги с грузами - ограничение на углы управляемого наклона. 360 градусов по PITCH, YAW не покрутишь. В классическом gimbal - ставим скользящие контакты и получаем полную свободу по всем трем осям.
Про люфты. Механизм упирается в редуктор только при высоких ускорениях. Причем упирается через упругий элемент и это уже не жесткий толчек, а легкое отклонение с плавным наростанием усилия. В обычной работе редуктор “убегает” от нагрузки при обнаружении минимального усилия. На всех звеньях редуктора еще не успевает возникнуть напряжения, как мотор уже уводит его.
Если цепляться к мелочам, то бесколлекторный мотор тоже работает с толчками, ведь силу трения стояния никто не отменял, а ее превышение требует заданного минимального уровня силы. Если поставить себе такую задачу, то сила трения стояния может быть измерена по каждой оси в подвесе и с загрязнением и деформацией будет ухудшаться. У Force Servo есть обратная связь по фактической силе, а у бесколлекторника нету.
как пример: На видео с GoPro видно, что есть небольшое запаздывание. Причина - контроллер двигателя от микросервы имеет слишком большой deadband (мертвую зону). То есть двигатель осуществляет реакцию после превышения определенного уровня нагрузки. Программируемый контроллер это позволяет решить.
По противовесам. В идеале делаются подвесы с пятью осями, тогда две первые оси держат горизонт, а дальше возможно любое вращение. Противовесы могут быть расположены не только по вертикали, но и по горизонтали. Запатентованная 80 лет назад система продемонстрирована с четырьмя противовесами в разных направлениях (как уже говорил ранее, брэнд “стэдикам” не имеет отношения к этим изобретениям, это изобрели другие и раньше). Вот мой пример с противовесом по горизонтали:
Алексей, за презентацию и подробный рассказ спасибо. В общем-то преимущества force servo по сравнению с класическими очевидны. Но с БК нельзя так категорично сравнивать только в “плюс”. Есть и сравнительнные минусы. У вас несколько неточностей в заключениях, на мой взгляд.
“В Force Servo нет люфтов” - неверно, люфты никуда не делись. Исчезла жесткая связь с нагрузкой, но если быстро перекинуть усилие с “+” на “-” - люфты себя проявят. Возможно в вашей модели серво они минимальны, но это сказывается на ее цене. И даже самая лучшая механика со временем приобретает люфты. В подвесе все работа состоит в постоянной смене направлений приложения усилия, и люфты редукторов будут себя проявлять в вашем случае. Вы вышли из положения, повысив инерционность системы, тем самым сдвинув требуемый отклик исполнительного механизма в низкие частоты, где скорости отработки люфтов уже достаточно.
Использование разнесения грузов для повышения момента инерции - это конечно помогает стабилизации, и это решение проверенное временем. Но не забывайте, что улучшаются только две оси, а третья (которая параллельна штанге) сохраняет обычную инерцию, и для нее уже этим плюсом не воспользуешься. На летательных аппаратах, при правильной настройке мозгов, ось YAW и так прекрасно стабилизирована. А вот в ручном применении - уже нет. Ну и ещё один существенный минус штанги с грузами - ограничение на углы управляемого наклона. 360 градусов по PITCH, YAW не покрутишь. В классическом gimbal - ставим скользящие контакты и получаем полную свободу по всем трем осям.
По противовесам. В идеале делаются подвесы с пятью осями, тогда две первые оси держат горизонт, а дальше возможно любое вращение. Противовесы могут быть расположены не только по вертикали, но и по горизонтали. Запатентованная 80 лет назад система продемонстрирована с четырьмя противовесами в разных направлениях
Можно пожалуйста об этом по подробнее,или ссылку на этот патент.Спасибо.
Можно пожалуйста об этом по подробнее,или ссылку на этот патент.Спасибо.
тута : rcopen.com/forum/f123/topic269364/107
Патент US2007215
Спасибо за предоставленную ссылку на страничку.А устройством изображённым на рисунке патента ,я пользовался при киносъёмке на 16мм камеру Красногорск-2 в 80-х годах.Хорошо выручало тогда.