Интелектуальный , умный и независимый подвес камеры? Реально!

Величина крутящего момента, которого достаточно, чтобы стабилизировать и вращать камеру, зависит от точности балансировки и от величины трения в подшипниках.
Алексей, Ваши эксперименты это хорошо, но при правильной балансировке подвеса, для ГоПро хватает и мелких БК моторов.
Я использую 30граммовые моторы. На питч можно и в 2 раза легче ставить, т.к. мощи хватает с головой, и уменьшена в настройках в 2 раза от максимальной. Моторы нормально держат резкие виражи и акивный пилотаж. А экономичность я думаю здесь врядли кого то интересует, т.к. подвес потребялет ничтожно мало по сравнению с самим коптером.
Вот эксперементальный подвес товарища, у него моторы полегче моих. И крутящих моментов тоже достаточно.

Алексей, Ваши эксперименты это хорошо, но при правильной балансировке подвеса, для ГоПро хватает и мелких БК моторов.
Я использую 30граммовые моторы.
30 грамм на один мотор при массе камеры 77г.
Теперь мне актуальнее готовить решение именно для тяжелых камер.
Под профессиональную технику достойных подвесов пока просто нет.
Для киношной техники требуется расчет на нагрузку в 7 кг и более (для тех киношников, кто использует не минимальный вариант RED камер, а снимает, например, техникой ARRI).
Подготовить качественное коммерческое решение не так просто, это займет еще времени.
Любителей антиквариата я осуждать не стану.
Теперь мне актуальнее готовить решение именно для тяжелых камер.
Ну вот отсюда я думаю и стоит плясать, т.к. лишние 60 грамм для коптера под ГоПро не особо напряжно. Тут люди захотят простоту, без шестеренок и прочей сложной штуки. А вот для больших аппаратов стои заняться
Смастерил презентацию с русскоязычным текстом:
круто! искренне преклоняюсь перед Вашими талантами, Алексей!
Смастерил презентацию с русскоязычным текстом:
Шикарно. Как бы теперь эту историю в практическую плоскость перевести? И легкий подвес , под тяжелую камеру на них собрать.
Смастерил презентацию с русскоязычным текстом:
Отличная работа системы!. Отличная презентация!.Осталось за малым - воплотить в реальную конструкцию под средние и тяжёлые камеры.
Алексей, за презентацию и подробный рассказ спасибо. В общем-то преимущества force servo по сравнению с класическими очевидны. Но с БК нельзя так категорично сравнивать только в “плюс”. Есть и сравнительнные минусы. У вас несколько неточностей в заключениях, на мой взгляд.
-
“В Force Servo нет люфтов” - неверно, люфты никуда не делись. Исчезла жесткая связь с нагрузкой, но если быстро перекинуть усилие с “+” на “-” - люфты себя проявят. Возможно в вашей модели серво они минимальны, но это сказывается на ее цене. И даже самая лучшая механика со временем приобретает люфты. В подвесе все работа состоит в постоянной смене направлений приложения усилия, и люфты редукторов будут себя проявлять в вашем случае. Вы вышли из положения, повысив инерционность системы, тем самым сдвинув требуемый отклик исполнительного механизма в низкие частоты, где скорости отработки люфтов уже достаточно.
-
Использование разнесения грузов для повышения момента инерции - это конечно помогает стабилизации, и это решение проверенное временем. Но не забывайте, что улучшаются только две оси, а третья (которая параллельна штанге) сохраняет обычную инерцию, и для нее уже этим плюсом не воспользуешься. На летательных аппаратах, при правильной настройке мозгов, ось YAW и так прекрасно стабилизирована. А вот в ручном применении - уже нет. Ну и ещё один существенный минус штанги с грузами - ограничение на углы управляемого наклона. 360 градусов по PITCH, YAW не покрутишь. В классическом gimbal - ставим скользящие контакты и получаем полную свободу по всем трем осям.
Про люфты. Механизм упирается в редуктор только при высоких ускорениях. Причем упирается через упругий элемент и это уже не жесткий толчек, а легкое отклонение с плавным наростанием усилия. В обычной работе редуктор “убегает” от нагрузки при обнаружении минимального усилия. На всех звеньях редуктора еще не успевает возникнуть напряжения, как мотор уже уводит его.
Если цепляться к мелочам, то бесколлекторный мотор тоже работает с толчками, ведь силу трения стояния никто не отменял, а ее превышение требует заданного минимального уровня силы. Если поставить себе такую задачу, то сила трения стояния может быть измерена по каждой оси в подвесе и с загрязнением и деформацией будет ухудшаться. У Force Servo есть обратная связь по фактической силе, а у бесколлекторника нету.
как пример: На видео с GoPro видно, что есть небольшое запаздывание. Причина - контроллер двигателя от микросервы имеет слишком большой deadband (мертвую зону). То есть двигатель осуществляет реакцию после превышения определенного уровня нагрузки. Программируемый контроллер это позволяет решить.
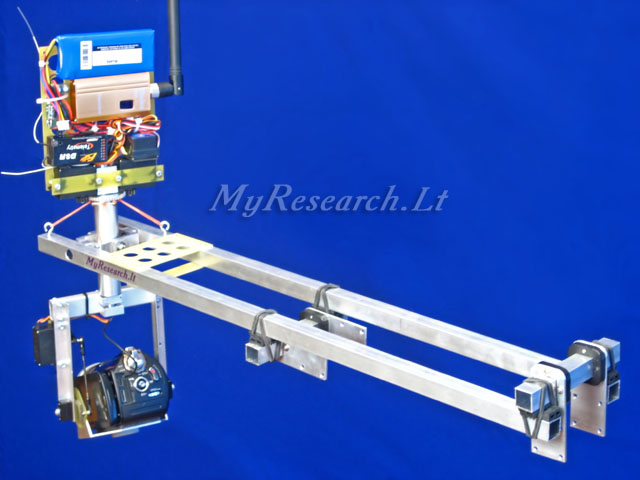
По противовесам. В идеале делаются подвесы с пятью осями, тогда две первые оси держат горизонт, а дальше возможно любое вращение. Противовесы могут быть расположены не только по вертикали, но и по горизонтали. Запатентованная 80 лет назад система продемонстрирована с четырьмя противовесами в разных направлениях (как уже говорил ранее, брэнд “стэдикам” не имеет отношения к этим изобретениям, это изобрели другие и раньше). Вот мой пример с противовесом по горизонтали:
Алексей, за презентацию и подробный рассказ спасибо. В общем-то преимущества force servo по сравнению с класическими очевидны. Но с БК нельзя так категорично сравнивать только в “плюс”. Есть и сравнительнные минусы. У вас несколько неточностей в заключениях, на мой взгляд.
“В Force Servo нет люфтов” - неверно, люфты никуда не делись. Исчезла жесткая связь с нагрузкой, но если быстро перекинуть усилие с “+” на “-” - люфты себя проявят. Возможно в вашей модели серво они минимальны, но это сказывается на ее цене. И даже самая лучшая механика со временем приобретает люфты. В подвесе все работа состоит в постоянной смене направлений приложения усилия, и люфты редукторов будут себя проявлять в вашем случае. Вы вышли из положения, повысив инерционность системы, тем самым сдвинув требуемый отклик исполнительного механизма в низкие частоты, где скорости отработки люфтов уже достаточно.
Использование разнесения грузов для повышения момента инерции - это конечно помогает стабилизации, и это решение проверенное временем. Но не забывайте, что улучшаются только две оси, а третья (которая параллельна штанге) сохраняет обычную инерцию, и для нее уже этим плюсом не воспользуешься. На летательных аппаратах, при правильной настройке мозгов, ось YAW и так прекрасно стабилизирована. А вот в ручном применении - уже нет. Ну и ещё один существенный минус штанги с грузами - ограничение на углы управляемого наклона. 360 градусов по PITCH, YAW не покрутишь. В классическом gimbal - ставим скользящие контакты и получаем полную свободу по всем трем осям.
По противовесам. В идеале делаются подвесы с пятью осями, тогда две первые оси держат горизонт, а дальше возможно любое вращение. Противовесы могут быть расположены не только по вертикали, но и по горизонтали. Запатентованная 80 лет назад система продемонстрирована с четырьмя противовесами в разных направлениях
Можно пожалуйста об этом по подробнее,или ссылку на этот патент.Спасибо.
Можно пожалуйста об этом по подробнее,или ссылку на этот патент.Спасибо.
тута : rcopen.com/forum/f123/topic269364/107
Патент US2007215
Спасибо за предоставленную ссылку на страничку.А устройством изображённым на рисунке патента ,я пользовался при киносъёмке на 16мм камеру Красногорск-2 в 80-х годах.Хорошо выручало тогда.
Про люфты. Механизм упирается в редуктор только при высоких ускорениях. Причем упирается через упругий элемент и это уже не жесткий толчек, а легкое отклонение с плавным наростанием усилия. В обычной работе редуктор “убегает” от нагрузки при обнаружении минимального усилия. На всех звеньях редуктора еще не успевает возникнуть напряжения, как мотор уже уводит его. Если цепляться к мелочам, то бесколлекторный мотор тоже работает с толчками, ведь силу трения стояния никто не отменял, а ее превышение требует заданного минимального уровня силы. Если поставить себе такую задачу, то сила трения стояния может быть измерена по каждой оси в подвесе и с загрязнением и деформацией будет ухудшаться. У Force Servo есть обратная связь по фактической силе, а у бесколлекторника нету.
Объяснение принято, и действительно трение покоя будет мешать и в БК прямом приводе (сейчас многие начинающие подвесостроители сталкиваются с этим но в силу слабого понимания принципов работы, не могут найти истинную причину проблем с настройкой). Но все таки, тут у прямого привода несомненное преимущество - магнитное поле можно “развернуть” очень быстро даже на большой угол, гораздо быстрее чем отработает редуктор. Ведь это логично, редуктор реализует прнцип рычага: если мы выигрываем в силе - проигрываем в расстоянии, при одинаковом подводимом усилии.
Объяснение принято, и действительно трение покоя будет мешать и в БК прямом приводе (сейчас многие начинающие подвесостроители сталкиваются с этим но в силу слабого понимания принципов работы, не могут найти истинную причину проблем с настройкой). Но все таки, тут у прямого привода несомненное преимущество - магнитное поле можно “развернуть” очень быстро даже на большой угол, гораздо быстрее чем отработает редуктор. Ведь это логично, редуктор реализует прнцип рычага: если мы выигрываем в силе - проигрываем в расстоянии, при одинаковом подводимом усилии.
Еще недавно авторитеты хобби-видео использовали сайн-стар подвесы с мощными сервами и ременным приводом с дополнительным понижением 1/5 и более. Это не считали медленным (типа от 0,5 до 1,0 сек/60градусов) .
Вы правы, конечно редуктор замедляет реакцию.
Вопрос в том, какая скорость уже является избыточной.
Вот пример полета пилотажного вертолета. Вращением управляет и стабилизирует редукторная серва. Мультикоптер с его пропеллерами фиксированного шага никогда не будет так крутится.
Микро вертолеты вращаются еще быстрее. Скорости редукторных серв хватало. Проблема была в том, что они работали слишком “жестко”, что бы получать качественное художественное видео.
У F-Servo тоже много моментов и в механике и в электронике, которые можно изменять и добиваться лучшего результата. Фронт работ очень большой. Кроме скорости редуктора еще надо подбирать оптимальную скорость наростания усилия (механика), ПИД настройки контроллера (электроника)… Это все задача разработчика. А пользователь должен получить готовое решение, которое остается только привинтить и подключить. Как и обычная серва, тут не будут требоваться сложные настройки через компьютерный интерфейс, правильные решения уже будут реализованы в готовом изделии (как в Position Servo). Просто подключил и все крутится.
У F-Servo тоже много моментов и в механике и в электронике, которые можно изменять и добиваться лучшего результата. Фронт работ очень большой. Кроме скорости редуктора еще надо подбирать оптимальную скорость наростания усилия (механика), ПИД настройки контроллера (электроника)… Это все задача разработчика. А пользователь должен получить готовое решение, которое остается только привинтить и подключить. Как и обычная серва, тут не будут требоваться сложные настройки через компьютерный интерфейс, правильные решения уже будут реализованы в готовом изделии (как в Position Servo). Просто подключил и все крутится.
А есть уже готовое решение в реализации?.
Сервы или БК - тут все в равенстве. При подъеме тяжелой аппаратуры в воздух лично до сих пор предпочтение сервам отдаю…вес. БК только если вес во главу не ставится.
Охренеть…вставать скоро , а мы и не ложились.😦
Правильно,просмотр,изучение и анализ собранной информации требует времени.
А есть уже готовое решение в реализации?.
На бзе Эцилопа это реализовалось достаточно просто.
ecilop.com/shop/ecilop_easy.phtml
ecilop.com/shop/fs-upgrade.phtml
На базе Эцилопа это реализовалось достаточно просто.
Меня интересует более приземлённый вариант.Возможно ли использовать Вашу разработку в этой конструкции вместо двух звеньевой механической руки.Для компенсации вертикальных колебаний.
www.youtube.com/watch?v=3dpS_qxNTDc
\\\ Спасибо. Промблему с вертикальными колебаниями обсуждаем на этой ветке.Пока что готового решения нет.rcopen.com/forum/f123/topic317383/1201
Меня интересует более приземлённый вариант.Возможно ли использовать Вашу разработку в этой конструкции вместо двух звеньевой механической руки.Для компенсации вертикальных колебаний.
www.youtube.com/watch?v=3dpS_qxNTDc
\\\ Спасибо.
Использовать можно. Я пока не готов сказать, когда будет коммерческое решение для таких девайсов.
Сам именно такой девайс теперь и проектирую. Хотя, не совсем такой. На вашем примере есть странности:
Во первых сказано про 5 осей, но осей только три.
Во-вторых последовательность осей стабилизации не правильная.
На этом примере поворачивая камеру вниз, ось стабилизации бокового крена пропадает и остается только две оси.
Когда говорят о четырех или пяти осях, то имеется ввиду устранение проблемы “gimbal lock” , по русски, видимо - блокировка кардана. У этих ребят блокировка кардана лишь усугубляется неверной очередностью осей.
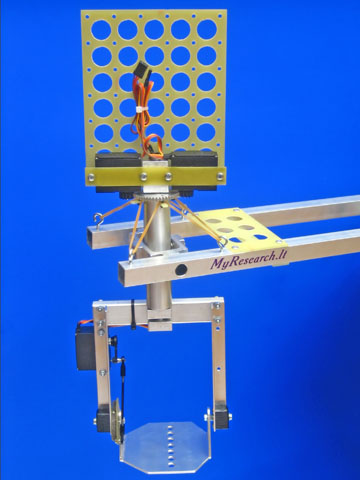
Вот мой давний пример с четырьмя осями. Если добывать ось для “декоративного” наклона вбок, то будет пять осей. И проблемы Gimbal lock нету и направляй куда-угодно. Только на оси выравнивания теперь F-servo ставить вместо резинок и двойного сервопривода сверху.
Здесь на риге почти аналогичная последовательность расположения осей \\\ photoshipone.com/phoenix-brushless-drive-gimbals/ \\\ За две остальные оси в приведённом примере видно считают механическую руку.