Полетный контроллер DJI Naza M v1

только штраф максимум!!!
Там есть пункт типа ВИД АККУМУЛЯТОРА, и там я выбрал название, вот которое сейчас вылетело из головы, был бы дома, посмотрел бы.
какой срок ? о чём Вы ? Уже дело уголовное возбудили ?
Зачем краски сгущать.
Да, летал. Да, больше не буду. Простите дяденьки.
Ну это я маленько утрирую, но если толковать это правило №10 по Вашему , то завтра утром Вы должны взять коптер и сухари и пойти в полицию или прокуратуру и заявить что признаёте все свои ошибки и готовы за них отвечать. Вам с удовольствием в этом помогут, там такой халяве будут рады. Но успешным человеком после этого точно не назовут.
Ребят помогите с назой. Имеется квад, размер 600, стоит наза м лайт с ГПС, где то на высоте 10 метров при вираже вырубились движки(предпологаю вылетел силовой разъем, т.к. не арминг не реагировала) и упала камнем вниз, пролетела сквозь яблоню сломав несколько веток, шмякнулась об землю, в минус 2 винта и 2 луча по полам(рама самодел алю профиль 10х10). Сделал новые лучи, запускаю, после арминга 2 мотора на сломанных лучах(боковые) крутятся заметно быстрее двух других, при попытке взлета переворачивается не оторвавшиь от земли. При запуске в руке после арминга чуствуется что 2 боковых мотора сильно газуют, стоит приподнять стик газа хоть на чуть чуть от нуля моторы дают почти полный газ, особенно сильно передний правый. Пробовал менять местами регули(афро 30А) картина та же. В ассистанте проводил повторную калибровку, ничего не изменилось. Пробовал в атти и гпс, пробовал с отключенным модулем гпс, без изменений. Прокладку проводки не менял. До этого летала вообще без единого глюка. В чем может быть причина? Такая хрень только после краша появилась. Могло ли что нибудь внутри назы оторваться и теперь вибрировать?
Сегодня снова попробовал подключить к компу через ассистант, зашел во вкладку тулс и увидел что высвечивается ошибка в одном из полей:

Что это означает и можно ли этоисправить? Я так понимаю, как тут и сказали, что ошибка акселерометра а что дальше делать хз.
Не судите строго, я новичек пока.
Зафиксировать коптер и провести калибровку.
Что это означает и можно ли это исправить?
народ стучит назой об стол
или по назе стучат. чтоб аксель был без ЕРРОР
Что это означает и можно ли этоисправить? Я так понимаю, как тут и сказали, что ошибка акселерометра а что дальше делать хз.
Не судите строго, я новичек пока.
У меня наза V1, было тоже самое после падения: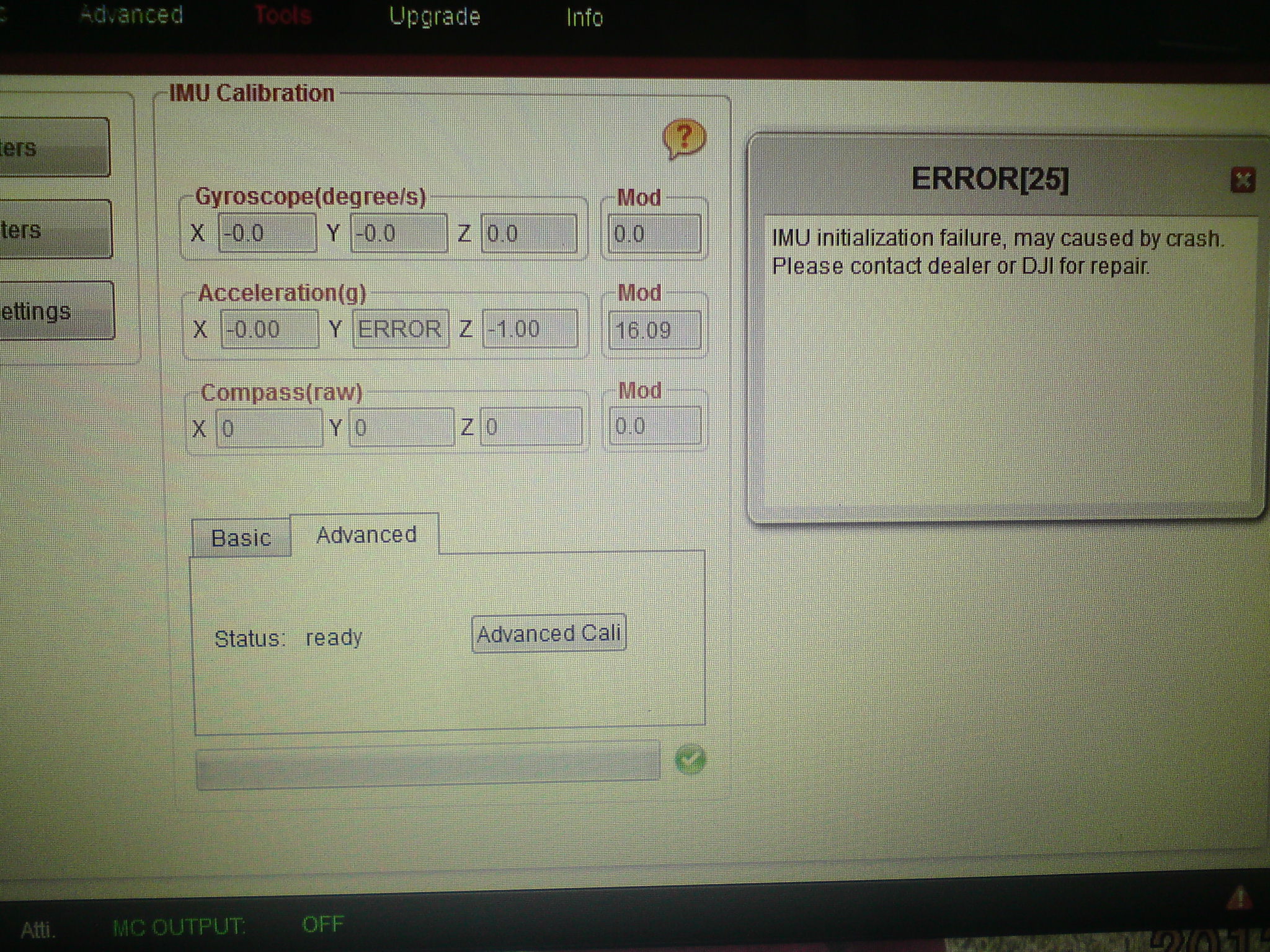 аккумулятор нашел в стороне, то есть произошло отключение. Кроме этого после ремонта заметил, что мои моторы перестали крутиться сразу после раскоряки стиками, а раньше крутились. Пришлось подключать програмкарту и снова их настраивать. Так же перстал калиброваться компас: перещелкиваю 7 раз - загорается желтый, кручу коптер в горизонтальной плоскости - загорается зеленый, который уже не тухнет хоть закружись. Стучал об стол, разобрал, выдрал параллон, все толкал-шатал - не помогло. Потом отвез в магазин где покупал, там перепрошили на ту же самую прошивку и наза до сих пор отлично летает больше полгода.
аккумулятор нашел в стороне, то есть произошло отключение. Кроме этого после ремонта заметил, что мои моторы перестали крутиться сразу после раскоряки стиками, а раньше крутились. Пришлось подключать програмкарту и снова их настраивать. Так же перстал калиброваться компас: перещелкиваю 7 раз - загорается желтый, кручу коптер в горизонтальной плоскости - загорается зеленый, который уже не тухнет хоть закружись. Стучал об стол, разобрал, выдрал параллон, все толкал-шатал - не помогло. Потом отвез в магазин где покупал, там перепрошили на ту же самую прошивку и наза до сих пор отлично летает больше полгода.
назу тянет вбок, висит на месте очень плохо
Всё время тянет? Или только первые 5 минут? НАЗА должна прогреться.
Подскажите кто знает, как называется четырехштырьковый разъем который используется в Naza для подключения к портам “LED” и “EXP” (установлен на проводах PMU и на внешнем сигнальном светодиоде второй версии).
Ищу такую фишку отдельно.
Приветствую, назу тянет вбок, висит на месте очень плохо. Наза, компас, регули откалиброваны. Подскажите что не так? Рама клон dji f450
У меня Наза стоит внутри “кабины” на панели. Эта панель на защелках для быстрого и удобного снятия всей электроники. Так вот пару раз забывал защелкнуть эту панель и наза получалась где то на 2 градуса не горизонтально (боком), хотя с виду было и не заметно. При этом в ГПС коптер висел на месте, но как то не привычно для меня ( визуально не устойчиво), но стоило переключить в АТТ, коптер летел в бок со скоростью около 20 км/ч. Потому что он был откалиброван вместе с назой по уровню в горизонтальном положении, это положение Наза запомнила как горизонтальное, а тут она понимала что стоит боком и при нейтральном положении стиков пыталась встать ровно, таким образом ставя боком всю раму .
Это была первая причина. Но если там всё нормально и откалибровано в строго горизонтальном положении относительно моторов,а не ног, не батарейки и не подвеса, то вторая причина - это неровно установленные моторы (ВМГ)
Потому что он был откалиброван вместе с назой по уровню в горизонтальном положении, это положение Наза запомнила как горизонтальное, а тут она понимала что стоит боком и при нейтральном положении стиков пыталась встать ровно, таким образом ставя боком всю раму .
У меня тоже тянет вбок после взлета. Ни калибровка (даже специально с наклоном), ни наклонная установка назы не помогают.
Само проходит после 2-3 минут полета. Или взлететь, приземлиться, постоять 2 минуты.
Само проходит после 2-3 минут полета. Или взлететь, приземлиться, постоять 2 минуты.
Похоже на самопрогрев и дрейф параметров… Сам обычно перед взлетом после подключения батареи даю “отстояться” назе пару минут. Даже если спутники быстро находит.
Включил сейчас для интереса коптер дома на столе - через десять минут корпус назы стал ощутимо теплым наощупь.
Само проходит после 2-3 минут полета.
Сто раз уже писали, что НАЗА требует прогрева минут 5 после подачи питания (хоть первая, хоть вторая, без разницы). Если взлетать сразу - будит дрейфовать. Если подключен подвес, то он сразу не будет держать горизонт. По мере прогрева подвес постепенно встаёт в горезонт. Да и сама НАЗА держит горизонт только после прогрева датчиков. После подачи питания, покурите минут 4-5, а потом спокойно себе летайте. И будит вам счастье.
Ребят, помогите оценить/взвесить За и Против по части вот такого комплекта Назы.
В чем реально (исключая какие-нибудь ненужные чисто маркетинговые фичи) эта старая версия уступает новой V2? Может быть, есть смысл взять такой вариант, т.е. с новым GPS/компасом?
PS Трудно сделать правильный выбор, не пощупав/не полетав. Одну ошибку я уже совершил, взяв KK2. Больше с ним летать не хочу - и особенно не хочу промахнуться второй раз. По возможности дайте какие-нибудь дельные советы, какую Назу взять. Шестое чувство подсказывает, что “рулит” именно этот контроллер. Но вот не знаю, какая версия мне лучше подходит. Собственно, параллельно оцениваю и вариант Lite, но там сильно отталкивает невозможность подключить iOSD mini…
невозможность подключить iOSD mini…
ОСД рулит!!!
единственно чего не хватает в родном мини - это расход емкости батареи (((
Тоже через это прошел. Сейчас пользую лайт с простейшей ОСД. Мне хватает её возможностей.
Учитывая насколько Наза может быть безпроблемной, она летает “из коробки” практически без настроек, прощает и сама исправляет множество ошибок и проблем в конструкцией коптера, но она имеет несколько неприятных особенностей. Которые, кстати, из-за ее возможностей выглядят еще досаднее.
Во-первых, пресловутый “прогрев”, о котором она ничего не сообщает, хотя вполне могла бы.
Есть способ его визуально понаблюдать. Берем коптер с “холодной” Назой (к которой не было подключено питание минут 5-10), подключаем по USB, в Naza Assistant переходит на вкладку Tools, там где можно калибровать IMU.
Подключаем аккум и смотрим на надпись “Status:”. В течение 1.5-2.5 минут там будет надпись “idle”, а показания Гироскопа будет далеки от идеала и лишь постепенно будут приходить к нулевым значениям. Потом статус изменится на “Ready”. Вот он и есть этот прогрев. Причем даже после “Ready” показатели становятся совсем стабильными еще через некоторое время.
Если это был “горячий старт” для GPS (предположим просто сменили аккум в течение 5 минут), то после 20-30 сек на назе будет мигать только зеленый светодиод и она ничем не будет выдавать свое коматозное состояние, а наоборот показывает “все в норме, можно лететь”. Взлет в таком состоянии как минимум грозит сильной нестабильностью, а как максимум - возможен переворот вместо взлета.
Лучше бы она светодиодной индикацией заставляла бы пользователя подольше ждать перед взлетом, чем врать, что все в порядке.
Во-вторых, уплывает горизонт при долгом полете вперед. Тут уже это упоминали. Если в режиме GPS, когда она висит “как прибитая”, выжать “полный вперед”, что уже метров через 100 она начинает просаживаться по высоте. Высоту приходится добавлять. И чем дольше продолжается такой полет, тем сильнее надо добавлять высоту.
Третий глюк есть наверное только у меня, я пока не понимаю что его вызывает и как исправить. Изначально у меня было если в режиме GPS выдать “полный вперед”, то коптер немного сносило влево от прямолинейного движения. Почитал мануал, там рекомендовано немного повернуть антенну с компасом в противоположную сторону. Попробовал, вроде помогает, теперь летит почти прямо, еще не докрутил до идеала.
Но одновременно с этим была еще особенность, которая вообще не исправляется. После полета по прямой отпускаем стик в центральное положение. Коптер выравнивается и по инерции продолжает лететь вперед. И вот в это время резко уходит влево (на расстояние примерно равное расстоянию торможения). Т.е. летели 100 метров прямо, потом 10 метров тормозили и вот на 10 метров он там уйдет влево. Траектория получается как прямая с загнутым хвостом.
В режиме Atti вроде не проявляется. Надо будет еще потестить внимательно.
то после 20-30 сек на назе будет мигать только зеленый светодиод и она ничем не будет выдавать свое коматозное состояние, а наоборот показывает “все в норме, можно лететь”.
Надо дождаться частого мигания зеленым. Это запоминание точки взлета (т.е. спутники видит, координаты определены.)
Во-вторых, уплывает горизонт при долгом полете вперед. Тут уже это упоминали. Если в режиме GPS, когда она висит “как прибитая”, выжать “полный вперед”, что уже метров через 100 она начинает просаживаться по высоте. Высоту приходится добавлять. И чем дольше продолжается такой полет, тем сильнее надо добавлять высоту.
Ну здесь то НАЗА вообще ни при чём. Это проделки аэродинамики. Коптер с лучами и центральной площадкой более менее плоский. При движении вперёд с большой скоростью он сильно наклоняется, образуя этим отрицательный угол атаки, т.е. корпус действует как антикрыло. Вот эта отрицательная подъёмная сила и прижимает его к земле. Элементарно не хватает запаса мощности чтобы двигать коптер вперёд и бороться с прижимной силой. Как только Вы сбросите горизонтальную скорость, НАЗА вернёт коптер на первоначальную высоту. Как вариант: не давайте полный газ вперёд, оставьте небольшой запас мощности на удержание высоты и ничего у Вас проседать не будет.
не давайте полный газ вперёд, оставьте небольшой запас мощности на удержание высоты и ничего у Вас проседать не будет.
Все было бы так, если бы “добавить высоты” не исправляло бы ситуацию - тогда можно было бы говорить про нехватку мощности. Но ее хватает даже чтобы поднимать коптер еще выше, а не только удерживать по высоте.
Просто если назу надолго наклонить, то она почему-то забывает про необходимость держать высоту.
ну не гоночный это контролер не гоночный ,возьмите кролика и гоняйте это он хорошо делает