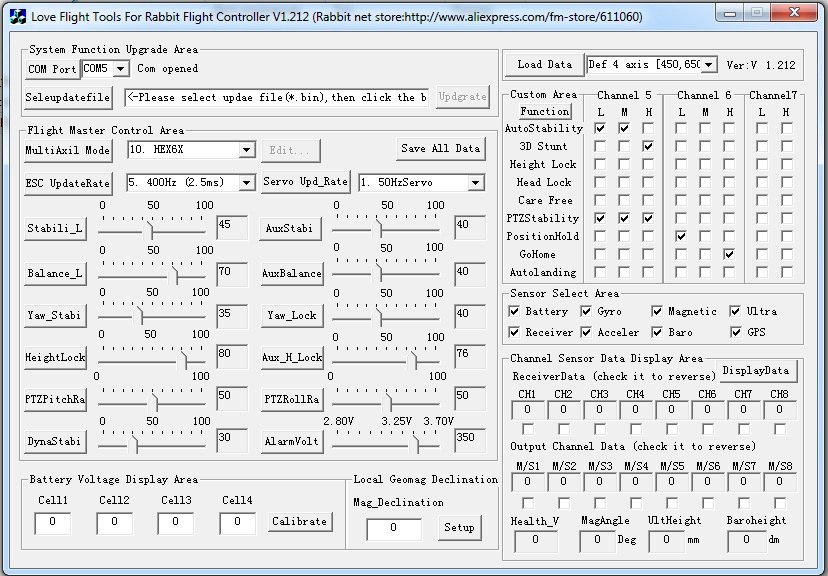
Rabbit Flight Controller

Тут надо ещё прояснит что многое выдаваемое китайцами за карбон на самом деле бутафория - текстолит с двумя слоями углеродного волокна снаружи, похож, но свойства совсем другие.
И ещё нужно добавить, то что часто трубки а-ля “карбон” часто бывают обычный текстолит(или прессованное гавно непонятного происходжения), с наклееной КЛЕЁНКОЙ!!! Вот такие трубки абсолютно безопасны. Во всех смыслах.
Те кто имел дело с карбоном, и не слушал предостережения других людей, точно нарывались на грабли КЗ. Лично я беру новые детали карбона всегда с опаской(края иногда дико острые) и сразу прохожу шкуркой, натфилём или напильничком. Все абсолютно грани и отверстия, где будут проходить и лежать провода. Любые провода. Если я знаю что провод будет “елозить” по краю карбоновой детали, дополнительно наклеиваю на край карбона изоляцию, или одеваю доп. изоляцию на сами провода. Тьфу-тьфу-тьфу, никаких КЗ с карбоном не имел. А неверующим раз 30 показывал, как замечательно “пищить” мультиметр на карбоновых деталях.
Если я знаю что провод будет “елозить” по краю карбоновой детали
ну тут стоит его защищать хотя б с точки зрения целостности провода. у карбоновых панелей очень острые края. помнится раму 450го вертолета я всю зашкуривал, что б провода не порезало.
Наставьте на путь истинный,не работает на кроле GPS от remzibi. Подключен напрямую без OSD, TX-RX местами менял, не видит.
Треха тормозит по горизонтали хуже. У меня по крайней мере.
Наставьте на путь истинный,не работает на кроле GPS от remzibi
Установить параметры модуля GPS : 38400 , 5Hz (можно 10 Hz)/
Модуль в рембизи помоему MT3329 - тогда делаем примерно так
rcopen.com/blogs/24868/13399 .
Ну и можно в модуль залить эту прошивку - rcopen.com/files/50110fcd9970730077ddbba9
(Но только если модуль MT3329 !!!)
Разобрался, однако, с модулем. Надо было его конектить на его скорости - 9600. Кроль видит, данные читает, осталось выяснить, будет-ли OSD работать с модулем на этой частоте.)
ЗЫ а кроликовский GPS подключился с miniGPS только на частоте 9600.
Спалив первенца КК2 случайными 12В и слегка погоревав достал с полки нового кроля с сонаром и жпс и приладил на новую 450ую раму клона DJI с перепрошитыми плюшами. Поднастроил, чуть подлетнуть попробовал дома, но места мало а на улице дубак в минус 25 =) так что отложил глобальный облёт.
Вопросов чуть возникло:
Светодиоды у меня на балансирный разъём прикручены напрямую, стоит ли их через кроля цеплять, что сие даст в плане функциональности? Я так понял что плюсы вместе цепляем на акум., а минусы берём с разъёмов кроля?
upd. - на 16 что ли странице темы откопал про ленты - пост #612 и чуть дальше … думаю стоит прикрутить - приятней будет когда мигают по разному.
По частоте регулей вопрос возник - по умолчанию 300 герц, я попробовал 500 - не завелись - пищать криво стали, поставил 400 - вроде работают … 400 оставить или на 300 вернуться ради стабильности?
PTZ в режимах это включение серв подвеса?
поставил 400 - вроде работают … 400 оставить или на 300 вернуться ради стабильности?
думаю 400 как раз для:
клона DJI с перепрошитыми плюшами
400 оставить или на 300 вернуться ради стабильности?
ради стабильности имеет смысл 400 оставить
ptz действительно включение стабилизации подвеса
Вопросов чуть возникло:
Светодиоды у меня на балансирный разъём прикручены напрямую, стоит ли их через кроля цеплять, что сие даст в плане функциональности? Я так понял что плюсы вместе цепляем на акум., а минусы берём с разъёмов кроля?
video.yandex.ru/#search?text=rabbit flight control…
Сделано на ULN2803, но будет с инверсией. Я сделал так же, чтоб не заморачиваться. Если у кроля открытый коллектор - то так как ты написал. Эксперименты делать не стал, не так это важно)
Был квадрик, переделал на гексу с полной заменой ВМГ. Теперь играюсь с настройками… При спуске сильно трусит, как будто не догруженый сильно. Кстати, поставил отдельный бек… сонар в гуи показывает отлично, а вот на деле - не работает. С ГПС проблема, нужно выпаиваться компас - откалибровать не могу нормально. Видать слишком близко силовые провода идут.
ТТХ:
600мм
1,6кг
880 кв
10х4.5
2х2.2Ач
Прошивка 1.212.
Подскажите, что подкрутить , что бы уменьшить раскачку при спуске… пару раз боялся что упадет…
… а такой вопрос. летаю на 211й. посещают мысли обновить софт. как там с плавностью полета, и работой всех функций,хуже не будет? Или может подождать что то новенькое?.
… а такой вопрос. летаю на 211й. посещают мысли обновить софт. как там с плавностью полета, и работой всех функций,хуже не будет? Или может подождать что то новенькое?.
Я прошил на 230. Честно говоря разницы не заметил по сравнению с 220. Летает. Все работает.
Наставьте на путь истинный,не работает на кроле GPS от remzibi. Подключен напрямую без OSD, TX-RX местами менял, не видит.
Разобрался с GPS. Кроль читает модули и на 9600 и на 38400, можно не заморачиваться с изменением этой цифры, у меня проблема была в глючном модуле от клона remzibi. Посмотрел сегодня параметры родного u-blox через u-center - подключение на 9600.
Кроль читает модули и на 9600 и на 38400
Об этом ранее и писалось (и не один раз). На 9600 он дает команду на переход на 38400, а затем на 5 гц- с этими параметрами и работает. А на 38400 и раздавать команд нечего - и так всё понятно работает 😃.
Я нисколько не переоцениваю возможности кролика, более того сам понимаю, что есть мелкие баги, НО должен заметить, что заявления, мол кролик гавно, ничего не работает, ГПС не работает, летит не туда и проч. - означает одно (вернее одно из двух) - что у пилота-конструктора либо руки из одного места растут, либо он не читал форум и не сделал того минимума, который обеспечит нормальную, заявленную работу кролика.
Кроль отличная платка для начала.
Но все познается в сравнении.
По соотношению (возможности+качество)/цена уже далеко в ж… по сравнению с большинством систем.
За 100$ AIO на древней меге +GPS+3DR с пиратом летает не хуже а то и лучше + море удобных фичей и баловства типа красивых и удобных ГУИ, режимов настроек, полета по точкам (да, летает но нах это нужно не понимаю, самому летать интересней, но попробовать было чертовски интересно)
Плюс у кроля кроля только один - он хорошо летит прямо из коробки, а с вием или пиратом надо будет поконо…биться, осваивать код, пиды и т.д., но оно того стоит.
… в вопросе предпочтения при выборе полетного контролера, для пользователей немаловажную роль играют задачи который предстоит выполнять. Это и так всем понятно. дальше цена вопроса. хотя по значимости у многих это может быть на первом месте, а потом уже удобство настройки и т.д.
Что касается надежности системы вцелом, то вероятность отказа контроллера примерна одинакова для всех систем( особенно внутри одной ценовой группы). Естественно, чем дороже пепелац, чем больше в него понапичкано систем, тем тщательней должна проводиться подготовка и проверка. У меня с кролем за все время было два глюка, которые я списываю именно на контроллер. первый, это я как-то даже видео показывал, когда при тестах нажал на тумблер пульта и контроллер тупо завис. в итоге пепелац грохнулся.Что за причина, я не знаю, Но раз такое однажды случилось. то нет гарантии, что повторится еще… А второй, когда делал съемку мероприятия с огромным числом народа. Летал естественно вдалеке над деревьями, без людей, машин и т.д. под коптером и вблизи полетной траектории. так вот в один момент, раз, и коптер начал заваливаться, никакие возвраты домой, удержания ничего не работало, даже подвес перекосило.х.з. как долетел на базу. после посадки и перезапуска также все было перекошено вплоть до горизонта. тут я грешу на милицейские радиостанции, коих в тот момент было немерянно( а может и заблуждаюсь). Вот это событие меня напрягло и “спустило на землю”. а до этого отправляясь на очередные полеты или съемку, даже мысли не проскакивало, что коптер вдруг может полететь куда-то не туда или обратно не вернуться… Вот такую мне кроль увереность вселил… Я ж давай опять изучать все системы , форумы на предмет надежности. Уже видеоаппаратура не дешевая летает, придется поднимать уровень других компонентов. Кроль как-бы уже тоже требует замены… На что менять? Вуконга мне еще рановато как по финансам так и по функционалу. да и тоже косяки у людей встречаются. Другие системы или еще сыроваты и требуют не меньшей возни. Ну может еще немец, хотя там тоже заморочки бывают.
сорри, что отошел от темы. но если порызмыслить, не такое уж у нас разнообразие систем. Или простейшие системы, или пилинные-перепиленные, но вполне сносно летащие, или совсем сырые, или экзотика непонятная.
большинству пользователей не очень то много нужно. Купил, подключил, быстренько настроил под свои параметры и полетел, не боясь, что что-то откажет или работать не будет. да есть такие, которые любят повозиться с железом, софтом, но тут уже больше исследовательский интерес или использование своих инженерных возможностей.
время то вперед идет, прошло уже, когда нужно было датчики выпиливать и проводками все в кучу коннектить. естественно, гораздо удобней купить коробочку, подключить системы и вперед. Но мало такого, а по-сути и выбора то нет. Но подождем, ведь еще год назад про джипиэс многие и не мечтали. Но с другой стороны, вот какие такие еще полетные режимы общественности реально интересны? коптер горизонт сам держит? высоту заданную? курс? домой возвращается? автопосадка? карфри всякие?.. это практически у всех систем с джипиэсом. Полет по точкам ,скорее маркетинговый ход, не каждый будет всякий раз нажимать кнопочку и радоваться ,что коптер сам вокруг лужайки полетел, как и управление айфонами и др. непультами… Ну может телеметрию в джентельментский набор включить или блютус. Так что если принципиально новых полетных режимов не придумать, то развитие скорее всего возможно только в отладке существующего функционала…
вот такие мысли вслух на тему кроля и полетных контроллеров вообще…
кроль не умеет больше ничего кроме
если речь о фичах с GPS, компасом и баро то тут полное фиаско по функционалу и качеству реализации пирату на AIO и назе
НО при этом как и раньше без танцев летит из коробки - это жирный плюс.
Вот вы сами себе противоречите. Это основное, что я заметил.
Что требовать от кролика, если он стабильно держит позицию, возвращается домой, сам сажает аппарат, и вообще стабильно летает? Возврат домой с автопосадкой у меня стоит на failsafe. И так как при полетах по камере сигнал теряется очень часто, то я убедился в “железобетонной” надежности работы GPS и компаса. Какие вообще могут быть претензии к кролику? Если все сделано грамотно, то все работает надежно и отлично.
Вообще все эти разговоры о надежности того или иного полетного контроллера и вообще железа у меня вызывает легкую иронию. О какой вообще надежности можно говорить для полетных плат ценой скажем до 5 -10 тыс. долларов ? Действительно надежные системы недоступны для простых смертных. Это оборонные решения с дублированием систем и горячей замены. Эти системы стоят невообразимых денег.
По идее, все, что летает в воздухе должно строиться с максимально возможной надежностью, в первую очередь, чтобы не нанести вред окружающим людям. Но я думаю тут вряд ли есть люди готовые потратить миллионы на свой БПЛА. Поэтому выбираются системы под “свой кошелек”. Но я думаю, не стоит считать чуть более дорогие контроллеры обалденно надежными и вселяющими всеобщее уважение. Та надежность, которая действительно нужна никак не стоит этих копеек, что стоят вуконги и пр.
Мы чаще говорим об относительной надежности, в контексте китайской электроники. Я думаю найдется мало желающих летать опасным способом, например над головами людей ?
Для того, чтобы снизить вероятность возникновения аварии в воздухе я например сделал следующее:
- Снял все микросхемы на плате кроля, перепаял заново. Пропаял все SMD элементы. Штатная китайская пайка зачастую вызывает плохое настроение ,если пристально поглядеть на плату.
- Промыл плату Fluxoff (ультразвук лучше не использовать). Покрыл в 5 слоев лаком Plastik.
- отказался от разъемов в силовых цепях (кроме разъема АКБ)
- разводка “звездой” для снижения наводок, помех.
- вынос компаса повыше, чтобы ничто в коптере не оказывало влияния.
- самодельный линейный BEC для полетной платы.
- Осмотр, пропайка регулей. Покрытие в 5 слоев лаком Plastik. Усаживание в прозрачную термоусадку. Герметизация с торцов термоклеем.
Ну и естественные конструктивные мелочи в виде - прокладка качественного провода МГТФ, если китайский провод вызывает подозрение, особое внимание, чтобы ничто нигде не перетерлось, не срезалось, не отвалилось.
Конечно до абсолютной надежности далеко, тем более, что остаются слабы звенья в виде ненадежности механических узлов, и самое главное - человеческого фактора. Но снизить вероятность аварии возможно.
Денис, спасибо. Очень хороший пост.
Не следует рассчитывать и тем более доверять да же самым дорогим системам в хоббийном деле.
Все, что летает, когда нибудь упадет.
Следует соблюдать технику безопасности В ПЕРВУЮ ОЧЕРЕДЬ
Ну блин парни вы даете😁. Вы вспомните че тады мона было купить или сделать самому, ну че поехали:
- Мегапират (плата иму + ардуина 100+40 зелени без гпс)
у мну не полетел, х.з мож руки кривые - Wii - много секаса с пидами
- Ардупилот (350 офф ценник, 250 у китайцев)
- СС от опен пилота (100 зелени попробуй купи называется)
- Кролл (70 без баро и компаса, 90 с баро и компасом)
Кролл реально летел из коробки за что ему честь и хвала… считаю что если не заморачиваться с плюшками то он летает ничем не хуже СС.
Счас понятно, что кролл при сегодняшнем изобилии брать смысла действительно нет. Да вообщем то и АЙОП - клон ардукоптера тож не актуален т.к. оригинал уже стоит просто смешных денег (в китайском исполнении)
З.Ы. Еслиб не появился бы кролл, фрифлай и остальные кетайские поделки, врябли бы теже дидроновцы спустили ценник на ардулилот.
У крола счас актуально другое применение поставить на елку вместо герлянды, шикарно мыргает😁
… ну, мне кажется что раставлять системы по-местам, как впрочем их сравнивать не вполне корректно, так как на конечный результат влияет так много факторов, что без научных-лабораторных тестов мы ничего не получим. да и сам “конечный результат” для каждого пользователя свой. Мне например, именно в данный момент не устраивает плавность полета особенно в ветер, это в рамках съемки видео. Фото впринципе нормально. Но тут есть в запасе игра настройками контроллера, перепрошивка регулей, доработка конструкции подвеса. Как уже говорил ранее, желание попробовать эцилоп ( при удачном стечении обстоятельств), может дать некоторое удовлетворение. Но вот сколько не прикидываю, ну нечем мне в данный момент заменить кроля по комплексу факторов. Пока на прицеле немец, но и то только после того, как наиграюсь с рамами, подвесами, регулями, пропеллерами ,моторами… ))
а так , что касается : … китайской электроники, …что ,то что летает имеет обыкновение упасть, … предполетной подготовки, и т.д., это и так все понятно
з.ы. … а то, что появление крола, это реальный шаг в хоббийном коптеростроении,это неоспоримый факт. Даже наза получила пинок для скорейшей установки джипиэса.