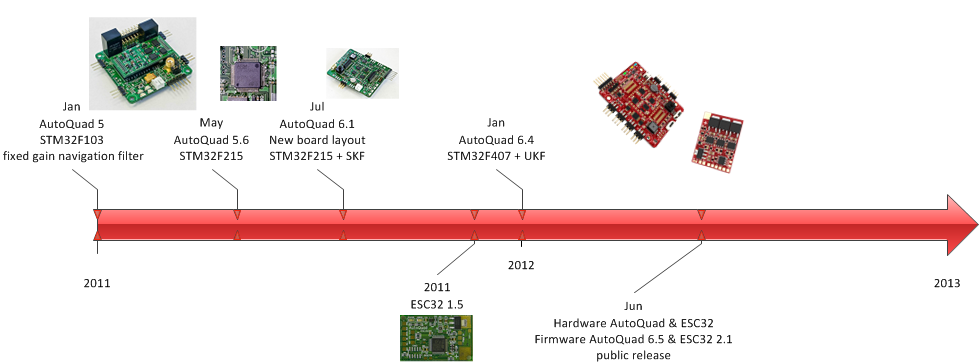
Autoquad от Билла Несбита, топовый контроллер по доступной цене

сейчас какой то 3DR Radio kit 433MHz хвалял (Sir Alex летает с ним)…
Ага сейчас это тренд, дешевле чем хэбэ про, но эквивалентный по характеристикам даже скорость выше по воздуху дает.
По поводу автоподстройки пидов ничего удивительного когда на борту есть запас по вычислительной мощности, еще в 1940 году появился математический метода
Зейглера-Николоса для вычисления ПИД характеристик ПИД контроллера, рано или поздно этот метод должны реализовать.
Сам контроллер, думаю надо брать, давно в воздухе витает, да уже шманит во всю, что надо переходить на современные процессоры, конечно за всеми не угонишся они будут появтся как грибы но сидеть ждать более нового и лучшего так ничего и не купишь в итоге да и цены на них как заметил не особо снижаються, единственное что меня смущает в нем на первый взгляд это то, что все в одном не модульная схема.
а что там за хитрый второй бародатчик с носиком?
Получается, в планах прошивка под самолет. На носик силиконовая трубочка одевается, второй конец которой заканчивается трубкой, направленной навстречу потоку. Получается дифманометр для измерения воздушной скорости.
какие то не топовые датчики в 6.1
Может, у программиста готовые библиотеки под них. А для новых датчиков нужно искать\писать библиотеки для ARM и отлаживать.
Раньше всех начал продавать - больше заработал. А потом уже можно и совершенствовать, продавать улучшенные V2.
На фото платы, которая в магазинах, один бародатчик…
Раньше всех начал продавать - больше заработал. А потом уже можно и совершенствовать, продавать улучшенные V2.
Раньше всех начали openpilot, хз можно назвать успешным CC проект или нет. Про революшен вообще молчу.
А автоквад давно собирался
еще в 1940 году появился математический метод
А споры до сих пор идут. Тем более, железно может быть реализован какой-нибудь ПИИ или многокаскадная схема регулятора с кучей нелинейностей ( if(x>500){x=500;} ). И фиг подберешь к нему коэффициенты. Еще и динамические характеристики ВМГ меняются с разрядкой аккумулятора.
Получается, в планах прошивка под самолет.
не факт, может быть они как то узнают скорость дрейфа или например меняют вектор на какое то время для компенсации инерции после отпускания стиков =) ну т.е. чтобы опустил стики и коптер застыл, а не продолжил плыть по инерции некоторое время
С моей точки зрения, аналоговые датчики всё же лучше, в том плане, что чем меньше в микросхеме прибамбасов - тем меньше глюков, а потом уже либо АЦП родное проца испрользовать либо через стороннее откатанное через SPI это уж как кому.
P.S. боюсь i2c…
аналоговые датчики всё же лучше, в том плане, что чем меньше в микросхеме прибамбасов - тем меньше глюков
имхо цифровые лучше, т.к. АЦП бывает разный, а аналоговый сигнал сильно подвержен помехам и когда АЦП внутри датчика - шумы при оцифровке минимальны
Аппонирую:
rcopen.com/forum/f123/topic283038
КУК
Ардукоптер
Мультипилот
СС
КУК
Ардукоптер
Мультипилот
СС
MultiWii, AfroFlight32
apm2 (и apm1 частично, т.е. ардукоптер, ардуплейн, ардуровер и т.д.), megapirate
Naza (баро и компас точно i2c, остальные не нашел), wookong
Даа, тут спорить можно до бесконечности, как говорится, поживём - увидим, а то делим шкуру неубитого медведя, надеюсь отзывы скоро появятся…
аналоговый всегда готов, а вот цифровой ждать приходится…
и еще - кто-то что-то про барометры MP3H61115A и MPXH6101A слышал?
от тут чет похожее было и летало оч. хоРРошо )) www.multiwii.com/forum/viewtopic.php?f=8&t=562&sta…
С моей точки зрения, аналоговые датчики всё же лучше, в том плане, что чем меньше в микросхеме прибамбасов - тем меньше глюков
Да, но не будет ли наводок от видеотракта например, на аналоговую часть? Все же когда данные идут уже в цифре, оно спокойнее как-то 😃
-а то делим шкуру неубитого медведя, надеюсь отзывы скоро появятся…
Если платы уже продаются, значит в Европе через неделю должны получить первые владельцы. Там отсылка заказов-то началась хоть уже?
Еще останавливает пока отсутствие поддержки обычных приемников, только Sbus и спектрумы всякие.
Сам контроллер, думаю надо брать, давно в воздухе витает, да уже шманит во всю, что надо переходить на современные процессоры, конечно за всеми не угонишся они будут появтся как грибы но сидеть ждать более нового и лучшего так ничего и не купишь в итоге да и цены на них как заметил не особо снижаються, единственное что меня смущает в нем на первый взгляд это то, что все в одном не модульная схема.
Да сейчас столько всего в продаже, что платы устаревают раньше, чем успевают дойти по почте 😃
А так, вот например 3M Pilot + GPS за 180$ с заявленной поддержкой Мегапирата, т.е. тот же Mission Planner вроде как должен работать и полет по точкам, ну разве что кругами не летает.
Да, но не будет ли наводок от видеотракта например, на аналоговую часть? Все же когда данные идут уже в цифре, оно спокойнее как-то
А вот тут, надо осваивать четырёхслойку и химический позитивный метод травления, или найти кто недорого платки делает, Sir Alex мне как-то скидывал ссылку, надо попробовать, новую делать буду, заказать (это так про домой), а вообще обратите внимание на IMU данного девайса и как плата разведена…
Напомните пожалуйста, есть в природе кодеры PPM->S.bus?
Пока нашел что у Frsky есть приемник с s.bus www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
но он совместим только с передатчиком футаба, а не с любым frsky
Еще останавливает пока отсутствие поддержки обычных приемников, только Sbus и спектрумы всякие.
Разве? В описании написано что есть отдельный разъем S.Bus и куча универсальных PWM Входов/выходов (моторов/приемников). Т.е. для s.bus просто сделали отдельный разъем… а обычные RC и так поддерживаются.
Железо поддерживает, прошивка пока нет.
At the moment only Sbus and Spektrum satelite is supported. PPM is is progress, but it requires proper testing before we release it.
Инфа по применяемому алгоритму для людей “в теме”.
Затестил Unscented Kalman Filter из исходников проекта тов. Несбита на своей плате с F4. Первый взгляд: продольные ускорения отрабатывает беспонтово. При продольных движениях платы с ускорением горизонт заваливает. Конвергенция после случайного дрифта по акселю почти отсутствует, и в параметрах это поправить нельзя: калман же, ковариации типа считаются автоматом.
Конечно, для квадриков это пох, там таких типов движения практически нет, а вот для самолета не пойдет. Магнетометр корректирует только курс, на крен и тангаж не влияет. Попутно фильтруются координаты ЖПС и высота, объединенная с баро - этим объясняется “вкопанность” по высоте и координатам.
А теперь самое интересное.
Алгоритм отличает жуткое потребление ресурсов: на F4 с аппаратным флоатом (на нем и продаваемая плата построена) чисто использование гироскопа занимает в цикле 8 мс, с добавлением акселя, ЖПС, компаса и баро цикл возрастает до 10-12мс, что дает 100Гц обновления максимум.
Вторая особенность проекта: в нем более 200 (двухсот) настраиваемых параметров. Помимо стандартных расходов и приевшихся лично мне еще с ардукоптера ПИДов, присутствует такая экзотика, как: ковариационные характеристики и уровни шумов гиры, компаса, акселя и ЖПС, параметры Q и N для каждого канала указанных датчиков (вычисляются статистически индивидуально для каждого датчика). Для акселя, компаса и гиры предусмотрены шестичленные кривые калибровки и многое другое интересное. К примеру, ошибки угла установки каждой оси и самого датчика в целом.
Загляните в config_default.h, охренеете. И зацените несколько закомментированных наборов Q и N. Эта радость калибруется индивидуально для каждого набора датчиков.
Полагаю, дешевле будет купить VN100 (он поддерживается автоквадом) и доплатить $300 за калибровку на заводе, чем проводить все нижеперечисленное самостоятельно дома для платы Несбитта:
www.vectornav.com/index.php?option=com_content&vie…
Так что советую расслабиться и подождать продолжения развития. Видео в теме считайте “чемпионским”: кроме Несбитта до такого же уровня полета вам плату не сможет настроить никто. На данном этапе по крайней мере.
Олег, если владеете английским, может имеет смысл запостить эту инфу на рцгрупс? По крайней мере, производитель может поправить это на этапе бета-тестирования.
Парням не до того. Они обсуждают, каким герметиком плату заливать 😃
Впрочем, в их теме явно написано: Patience and skill is required! - Нужны терпение и опыт, из коробки не полетит. Правда, кто это читает, а? Есть же крутое видео!!
Напоминать особо не нужно, посоны все осознают и у них хватает ума продавать ЭТО конечному пользователю.
А испытательную станцию небольшого предприятия в комплект положить забыли. Упс!
Вот, курните Вики, хотя бы эту: autoquad.org/wiki/wiki/…/static-calibration/
Что нужно для калибровки в статике (вкратце): пенопластовая коробка, в которую поместится плата с датчиками, термокамера хотя бы до -15С, статичное место, где нет вибраций (считай - термокамера на сейсмоосновании) - даже человек, ходящий рядом с морозилкой, может все испохабить.
В динамических калибровках тоже подразумевается делительная головка на сейсмоосновании, т.к. иначе аксель будет врать. Даешь сейсмотумбочку в каждом дворе!!!11
А самое гнусное, что без всего этого UKF нормально сходиться не будет. Возможно, в моем случае это и произошло.
Купили хай-энд плату за копейки. Да, она хай-энд и очень крутое открытое ПО. Но мне кажется, Вам что-то не доложили в набор. Догадываетесь, что именно и сколько оно стоит? 😉
Вот почему Вуконг стоит нее*ических денег по меркам Китая…
Прочитал вики только что. Сильно напоминает данную мной в предыдущем посте ссылку.
занимает в цикле 8 мс
мили или микро, если мили то пошол он лесом такой алгоритм…