PIXHAWK PX4 Autopilot еще одна летающая железка

Параметры хоть малость, но разные.
rc_speed =50?
Доброго времени суток! Друзья, вчера совершил первый вылет на пиксе с прошивкой 3.4. Рама f450, 2216/810kv. На улице было -10, небольшой ветер. Взлетел в альтхолде, чуть покрутил и перешел в лоитер. Точку держит, чуть гуляет по высоте да и по пидам заметна перекомпенсация. Через 2 минуты сработал RTL, коптер сел в точке взлета и после перезапуска отказался армиться. Чуть отогрел в машине планшет и подключился по телеметрии - ошибка компаса, видать замерз. Сейчас влез в логи и вижу следующую картину
. Правильно ли я понимаю, что RTL сработал по батарее? Акк 3s 4200, был не до конца заряжен (без нагрузки в тепле 12.1 В). Если интересен лог, то доступен по ссылке
Можно же подключаться к периферии (например ESC) поддерживающей мавлинк не отсоединяя ее от контроллера? Надоело уже отсоединять. Как это делать?
Есть два gps/компаса SE100, есть смысл их оба вешать? Хоть что-то это даст кроме увеличения веса? Кстати, очень внешне симпатичный gps и сделан не плохо внутри.
Есть два gps/компаса SE100, есть смысл их оба вешать?
Будет автоматом переключаться на модуль,который в данный момент времени держит больше спутников. С двумя одновременно,как я понял,пикс работать не умеет.
Понятно, тогда смысла нет во втором. А чего по мавлинку через контроллер до ESC?
Видать уработались мужики, есть кто живой?
Да есть вроде.Только наблюдатели.А что? )
Здравствуйте! Нужна помощь! Решил собрать коптер на пиксе. Был куплен CUAV Pixhack (типа оригинал в алюминиевом корпусе) + GPS CUAV U-blox NEO-M8N. Прошивка залита 3.3.3.
В разъем RADIO (telem1) подключен модуль wi-fi ru.aliexpress.com/item/…/32526622857.html (не реклама)
В разъем DBUS OP (telem2) подключен OSD banggood.com/3DR-Micro-OSD-For-APM2_5-2_6-2_8-Pixh… (не реклама)
В MissionPlanner установлены следующие значения:
SERIAL0_BAUD,115
SERIAL1_BAUD,57
SERIAL1_PROTOCOL,1
SERIAL2_BAUD,57
SERIAL2_PROTOCOL,1
SERIAL3_BAUD,38
SERIAL3_PROTOCOL,5
SERIAL4_BAUD,38
SERIAL4_PROTOCOL,5
SIMPLE,0
SR0_EXT_STAT,0
SR0_EXTRA1,0
SR0_EXTRA2,0
SR0_EXTRA3,0
SR0_PARAMS,0
SR0_POSITION,0
SR0_RAW_CTRL,0
SR0_RAW_SENS,0
SR0_RC_CHAN,0
SR1_EXT_STAT,0
SR1_EXTRA1,0
SR1_EXTRA2,0
SR1_EXTRA3,0
SR1_PARAMS,0
SR1_POSITION,0
SR1_RAW_CTRL,0
SR1_RAW_SENS,0
SR1_RC_CHAN,0
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_EXT_STAT,0
SR3_EXTRA1,0
SR3_EXTRA2,0
SR3_EXTRA3,0
SR3_PARAMS,0
SR3_POSITION,0
SR3_RAW_CTRL,0
SR3_RAW_SENS,0
SR3_RC_CHAN,0
Какие параметра оптимально установить? Информации изучил много но так окончательного ответа для себя не нашел. SR3 это ведь порт GPS, а там нули… хотя в пасмурную погоду 12-14 спутников…
SR3 это ведь порт GPS, а там нули… хотя в пасмурную погоду 12-14 спутников…
ничего не трогайте, это параметры управления потоком данных мавлинка
ничего не трогайте, это параметры управления потоком данных мавлинка
Хорошо. А для SR1 и SR2 какие оптимально параметры установить?
Хорошо. А для SR1 и SR2 какие оптимально параметры установить?
оставьте как есть, это не ваш случай мишен планнер сам выставит что ему нужно
оставьте как есть, это не ваш случай мишен планнер сам выставит что ему нужно
Неожиданно но это свершилось))) Выставил МП сам все. До этого нив какую не хотел. Получилось только после подключения по “воздуху” (WiFi). Выставились следующие параметры:
SIMPLE,0
SR0_EXT_STAT,2
SR0_EXTRA1,2
SR0_EXTRA2,2
SR0_EXTRA3,2
SR0_PARAMS,0
SR0_POSITION,2
SR0_RAW_CTRL,2
SR0_RAW_SENS,2
SR0_RC_CHAN,2
SR1_EXT_STAT,2
SR1_EXTRA1,4
SR1_EXTRA2,4
SR1_EXTRA3,2
SR1_PARAMS,10
SR1_POSITION,2
SR1_RAW_CTRL,2
SR1_RAW_SENS,2
SR1_RC_CHAN,2
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_EXT_STAT,2
SR3_EXTRA1,2
SR3_EXTRA2,2
SR3_EXTRA3,2
SR3_PARAMS,0
SR3_POSITION,2
SR3_RAW_CTRL,2
SR3_RAW_SENS,2
SR3_RC_CHAN,2
OSD не заработало пока в SR2 не вбил такие же параметры как и в SR1.
SR3 это ведь порт GPS, а там нули… хотя в пасмурную погоду 12-14 спутников…
я неверно понял суть вашего вопроса, решил что вы хотите увеличить качество приема за счет параметров.
осд к отдельному порту нужно подключать по 4 проводам (включая tx осд на rx полетного контроллера) тогда оно само инициализирует порт
Добрый день. Прошу подсказать будет ли работать Pixhack с данными регуляторами DYS SN40A Mini 40а SimonK ?
Благодаря долгим и усердным стараниям спалил чип max7456 на своей осдшке.
Сигнал RSSI был выведен на контакт на самой платке,через операционный усилитель , с такого приёмника. Моя старая платка осд с продвинутой прошивкой заводиться не желает,только со старой и у неё контактной площадки нет, а паять вывод с ноги атмеги- не настолько хорошо владею паяльником😒.
Вопрос: можно ли подать аналоговый сигнал RSSI c операционного усилителя на Pixhack, чтобы с него получать RSSI на осдшку? Если возможно,то как это сделать и что и где нужно прописать в МП чтобы всё работало?
Попробуйте в OSD выбрать источник RSSI: Mavlink, провод RSSI приёмника подключить на пин SBUS PixHawk’а, а в настройках MP выбрать RSSI_PIN: 103.
Virtual Pin 103: RSSI (Received Signal Strength Input) input pin voltage (SBus connector output pin). This is the voltage measured by the RSSI input pin on the SBUS-out connector (the bottom pin of the 2nd last servo connector on the 14 connector servo rail).
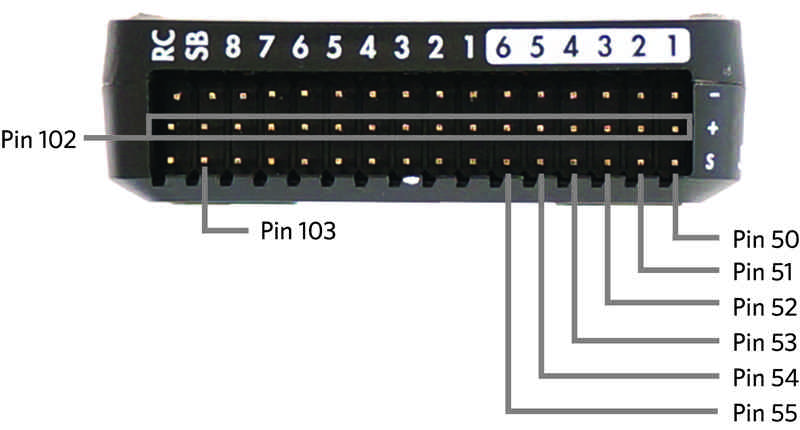
У меня так работает приёмник D4R-II, но у него изначально есть выход RSSI.
В Arducopter 3.4 названия параметров RSSI поменялись.
А такой вопрос, есть OSD, залита туда прошивка MinimOSD-Extra, все сконфигурировано, подключено, работает.
Возникла потребность обновить конфигурацию в OSD, поменять кол-во экранов, добавить показания, убрать, передвинуть и т.д.
Все собрано достаточно компактно, чтобы подключится к OSD и сменить конфиг, надо достаточно разобрать и собрать потом обратно.
Но тут увидел, что у конфигуратора “OSD_Config.exe” есть заманчивая опция - MAVLink mode, попробовал найти инфу, как работает, но особо ничего не нашел, но чуть изучил исходники проекта, пришел к выводу, что можно подключиться к USB полетника, включить этот режим в конфигураторе, после чего конфигуратор сможет слать специальные MAVLink пакеты в полетник, которые полетник проигнорирует, но вот OSD будет принимать и брать из них свою конфигурацию. Т.е. дело очень упрощается, кто-то пробовал такое? Работает?
В Arducopter 3.4 названия параметров RSSI поменялись
Через SBUS работать не желает,в моём случае,наверно припаять проводок к атмеге будет проще и быстрее…
но вот OSD будет принимать и брать из них свою конфигурацию. Т.е. дело очень упрощается, кто-то пробовал такое? Работает?
Вот-вот, я несколько строк назад этот же вопрос задавал, но пока ответа нет. Как ни странно. Меня то же притомило каждый раз отключать OSD и ESC
Попробуйте в OSD выбрать источник RSSI: Mavlink, провод RSSI приёмника подключить на пин SBUS PixHawk’а, а в настройках MP выбрать RSSI_PIN: 103.
Через SBUS работать не желает,в моём случае,наверно припаять проводок к атмеге будет проще и быстрее…
Оно всё таки заработало. Теперь всё по фен-шуй: сигнал RSSI c диода пакетов приёмника,через операционный усилитель одним сигнальным проводом на SBUS пикса и по мавлинк на осд. Танцы с бубном были вокруг конфигуратора осд: после сохранения параметров,нажатия кнопки Save current tab to и последующего чтения,параметр Mavlink RSSI почему то не сохранялся-сбрасывался на Channel 7. Несколько раз перезагружал прогу-конфиг пока получилось.
А с продвинутыми прошивками моя осдшка отказывается работать категорически-вроде бы нормально прошивается,но при попытке включить плеер конфигуратора: тишина.