PIXHAWK PX4 Autopilot еще одна летающая железка

оставьте как есть, это не ваш случай мишен планнер сам выставит что ему нужно
Неожиданно но это свершилось))) Выставил МП сам все. До этого нив какую не хотел. Получилось только после подключения по “воздуху” (WiFi). Выставились следующие параметры:
SIMPLE,0
SR0_EXT_STAT,2
SR0_EXTRA1,2
SR0_EXTRA2,2
SR0_EXTRA3,2
SR0_PARAMS,0
SR0_POSITION,2
SR0_RAW_CTRL,2
SR0_RAW_SENS,2
SR0_RC_CHAN,2
SR1_EXT_STAT,2
SR1_EXTRA1,4
SR1_EXTRA2,4
SR1_EXTRA3,2
SR1_PARAMS,10
SR1_POSITION,2
SR1_RAW_CTRL,2
SR1_RAW_SENS,2
SR1_RC_CHAN,2
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_EXT_STAT,2
SR3_EXTRA1,2
SR3_EXTRA2,2
SR3_EXTRA3,2
SR3_PARAMS,0
SR3_POSITION,2
SR3_RAW_CTRL,2
SR3_RAW_SENS,2
SR3_RC_CHAN,2
OSD не заработало пока в SR2 не вбил такие же параметры как и в SR1.
SR3 это ведь порт GPS, а там нули… хотя в пасмурную погоду 12-14 спутников…
я неверно понял суть вашего вопроса, решил что вы хотите увеличить качество приема за счет параметров.
осд к отдельному порту нужно подключать по 4 проводам (включая tx осд на rx полетного контроллера) тогда оно само инициализирует порт
Добрый день. Прошу подсказать будет ли работать Pixhack с данными регуляторами DYS SN40A Mini 40а SimonK ?
Благодаря долгим и усердным стараниям спалил чип max7456 на своей осдшке.
Сигнал RSSI был выведен на контакт на самой платке,через операционный усилитель , с такого приёмника. Моя старая платка осд с продвинутой прошивкой заводиться не желает,только со старой и у неё контактной площадки нет, а паять вывод с ноги атмеги- не настолько хорошо владею паяльником😒.
Вопрос: можно ли подать аналоговый сигнал RSSI c операционного усилителя на Pixhack, чтобы с него получать RSSI на осдшку? Если возможно,то как это сделать и что и где нужно прописать в МП чтобы всё работало?
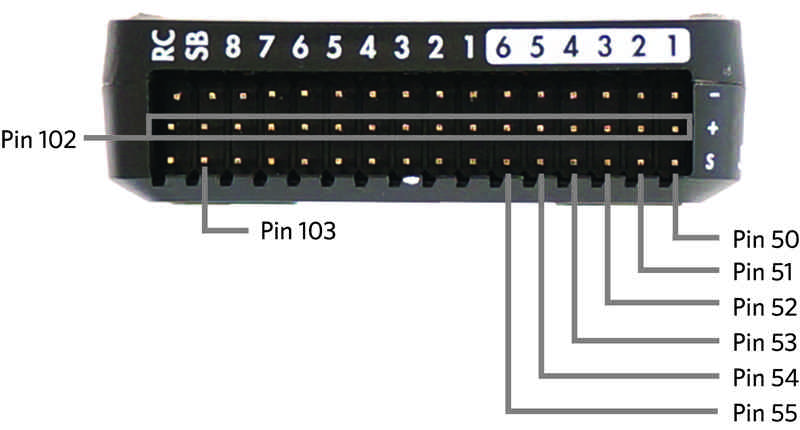
Попробуйте в OSD выбрать источник RSSI: Mavlink, провод RSSI приёмника подключить на пин SBUS PixHawk’а, а в настройках MP выбрать RSSI_PIN: 103.
Virtual Pin 103: RSSI (Received Signal Strength Input) input pin voltage (SBus connector output pin). This is the voltage measured by the RSSI input pin on the SBUS-out connector (the bottom pin of the 2nd last servo connector on the 14 connector servo rail).
У меня так работает приёмник D4R-II, но у него изначально есть выход RSSI.
В Arducopter 3.4 названия параметров RSSI поменялись.
А такой вопрос, есть OSD, залита туда прошивка MinimOSD-Extra, все сконфигурировано, подключено, работает.
Возникла потребность обновить конфигурацию в OSD, поменять кол-во экранов, добавить показания, убрать, передвинуть и т.д.
Все собрано достаточно компактно, чтобы подключится к OSD и сменить конфиг, надо достаточно разобрать и собрать потом обратно.
Но тут увидел, что у конфигуратора “OSD_Config.exe” есть заманчивая опция - MAVLink mode, попробовал найти инфу, как работает, но особо ничего не нашел, но чуть изучил исходники проекта, пришел к выводу, что можно подключиться к USB полетника, включить этот режим в конфигураторе, после чего конфигуратор сможет слать специальные MAVLink пакеты в полетник, которые полетник проигнорирует, но вот OSD будет принимать и брать из них свою конфигурацию. Т.е. дело очень упрощается, кто-то пробовал такое? Работает?
В Arducopter 3.4 названия параметров RSSI поменялись
Через SBUS работать не желает,в моём случае,наверно припаять проводок к атмеге будет проще и быстрее…
но вот OSD будет принимать и брать из них свою конфигурацию. Т.е. дело очень упрощается, кто-то пробовал такое? Работает?
Вот-вот, я несколько строк назад этот же вопрос задавал, но пока ответа нет. Как ни странно. Меня то же притомило каждый раз отключать OSD и ESC
Попробуйте в OSD выбрать источник RSSI: Mavlink, провод RSSI приёмника подключить на пин SBUS PixHawk’а, а в настройках MP выбрать RSSI_PIN: 103.
Через SBUS работать не желает,в моём случае,наверно припаять проводок к атмеге будет проще и быстрее…
Оно всё таки заработало. Теперь всё по фен-шуй: сигнал RSSI c диода пакетов приёмника,через операционный усилитель одним сигнальным проводом на SBUS пикса и по мавлинк на осд. Танцы с бубном были вокруг конфигуратора осд: после сохранения параметров,нажатия кнопки Save current tab to и последующего чтения,параметр Mavlink RSSI почему то не сохранялся-сбрасывался на Channel 7. Несколько раз перезагружал прогу-конфиг пока получилось.
А с продвинутыми прошивками моя осдшка отказывается работать категорически-вроде бы нормально прошивается,но при попытке включить плеер конфигуратора: тишина.
Вот-вот, я несколько строк назад этот же вопрос задавал, но пока ответа нет. Как ни странно. Меня то же притомило каждый раз отключать OSD и ESC
врялди ардупилот будет ретранслировать мавлинк полученный из юсб на другие порты втч тот к которому у вас подключен осд.
другое дело если модем и осд на одном сериале и посылать через модем
Вот-вот, я несколько строк назад этот же вопрос задавал, но пока ответа нет.
Так задайте его непосредственно разработчику
А что задавать то, вчера проверил, и это дело работает!
Просто подключаем полетник по ЮСБ к компу, подаем питание от аккума, чтобы все завелось и аналогавая часть ОСД, она у меня отдельно питается от аккума, у меня Пиксхавк.
Потом запускаем конфигуратор ОСД, указываем правильный порт, в конфигуратеро выбираем мавлинк моде, и вуаля, сохранения работает!
Когда сохраняем, уходит мавлинк пакте по ЮСБ, как я понял, но полетник его не понимает, но тем не менее пускает дальше сквозняком на порты телеметрии, ОСД его понимает, применяет новые параметры и перегружается, и после этого видим новую конфигурацию на экране.
Все проверил вчера, все работает. Так что, конфигурация ОСД облегчилась 😃
Единственное что, нельзя вычитывать конфигурацию ОСД таким способом, только записывать, как решение, надо сохранять еще в файл конфиг, чтобы потом можно было загрузить и отправить на ОСД.
И еще, редко, но бывает, что мавлинк пакет теряется в полетнике, может просто отбрасывается, так как в буфер на отправку заполнен, но ничего страшного, можно и пару раз кнопку нажать 😃
всем привет.
Прошу помощи, кто может дать ссылку на пошаговую инструкцию по настройке пикс4?
мишн планнер скачал, все подключил, проблемы с настройкой…
мишн планнер скачал, все подключил, проблемы с настройкой…
Я по этому видео настраивал
Спасибо. Тоже нашел уже его, сижу и кручу… блин долгое это дело.
2 раза обрыв связи был из-за плохого шнура.
Всетаки, я считаю, что это отличный контроллер за свои деньги.
Да, настройка непривычная, но ничего, вчсе выполнимо.
2 раза обрыв связи был из-за плохого шнура.
а телеметрия? Я прошил по проводу и сразу на телеметрию перешел.
телеметрия работает(сейчас на нее перехожу), но с андроидом что то не связывается, до этого и на нем работала, может там глюк какой, в самом планшете, я много служб лишних останавливал, может что то нужное остановил…
Вопрос по настройке ESC с blheli прошивкой. Я так понял, что параметр PPM throttle устанавливается сам при калибровке регулей, т.е. установленные параметры при калибровке будут перезаписаны. Так? Но это касается только параметра MIN и MAX, а вот среднее положение MID при калибровке не устанавливается, верно? Я об этом сужу по тому, как у меня MAX и MIN близки к тому что кажет МишенПланер (фактический MAX в МишенПланере 1881, в регулях 184, фактический MIN 982, в регулях 1012), а вот среднее значение (MID) совсем не соответствует в регулях тому что кажет МишенПланер, его ставить вручную надо в настройках регуля? Так?
А что задавать то, вчера проверил, и это дело работает!
Да, работает. Мавлинк через контроллер до OSD, за запись раскладки экрана - без проблем.
Уважаемые местные гуру, подскажите, что из крайних версий можно и нужно приобрести? Желательно комплектом с основными плюшками. В финансах скажем так что не ограничен, но в разумных пределах. Хочу апгрейтить свою гексу с АРМ.
Не помидорьте…, но вот это имеет отношение к данной теме?
да это pixhawk2. самое свежее что есть из официального. Не поставляется в РФ)