PIXHAWK PX4 Autopilot еще одна летающая железка

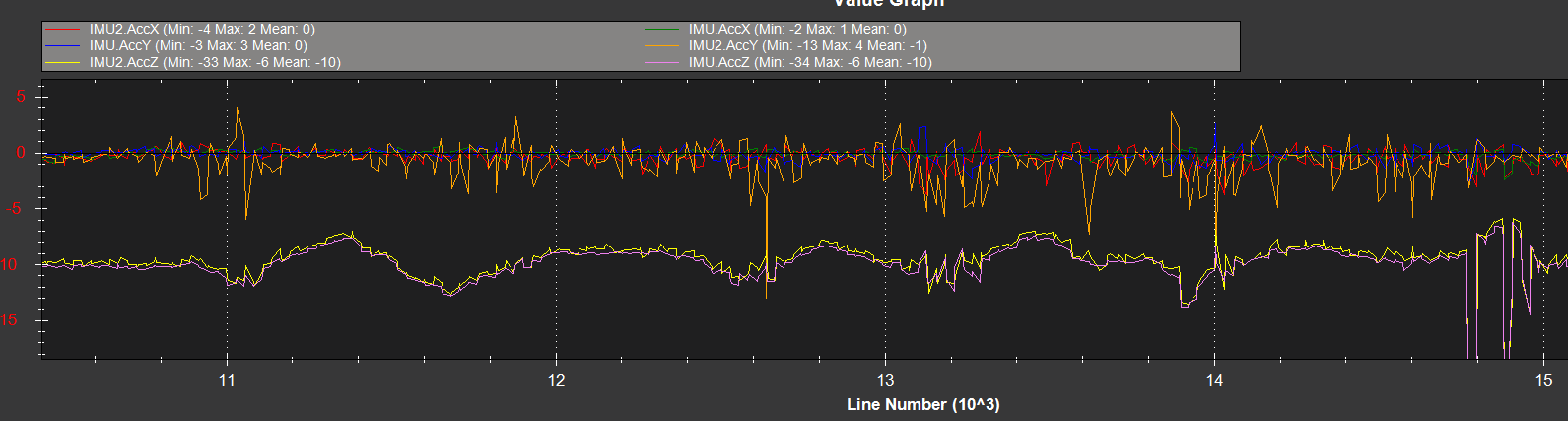
Большие по Z.
Это может быть связанно с тем что я летал в ветер? Или все таки это чистая вибрация ВМГ? Тогда я не понимаю откуда она берется. Винты отбалансированны.
Это может быть связанно с тем что я летал в ветер?
Вполне. Вибрация ровная. Да и сами можете оценить, откройте вкладку “вибрации 3.3” и как не будет выбросов более 30, значит норм.
пропы одели?
apm planner и mission planner
Да с пропами и без всё одно.
выкладывайте лог и фото-видео проблемного аппарата
К сожалению не получается лог выложить. Пишет некорректный файл. Хотя в Mission Planer открывается.
Записал видео как настраивать EKF
Спасибо за видео, очень стимулирует забраться поглубже и проанализировать.
По поводу решаемой вами проблемы есть такая мысль: Не верное направление поиска.
Во первых улет свечкой я тоже ловил (но на АПМ) и анализ логов показал, что улет был не из за неправильного измерения высоты, а из за бага, в котором из за слишком высоких уровней сигнала с акселя контроллер вдруг начинает набирать высоту, а потом подтверждать ее выставлением Dalt в догонку (Dalt начинает следовать за alt а не наоборот как должно быть) Впрочем это же происходит и с YAW, если контроллер видит, что не может справитс с удержанием направления, он DYAW подгоняет под существующий. Это системная проблема, подкрепленая багами. Хотя Алексей считает что такой проблемы не существует, потому что не должно быть вибраций и все! 😃
То что вы лечили на графике (колебание alt вокруг Dalt) лечится пидами, тротелом и прочими параметрами отвечающими за резкость перегазовок. По дифолту они расчитаны на тяжелые коптеры, тротел я себе раз в пять уменьшил что бы адекватно высоту держал (вес трешки 800гр)
Хотя такая настройка вероятно будет не лишней для любого коптера, только анализировать выставленую высоту нужно не по относительным замерам самого контроллера а каким то абсолютным замерам из вне.
мы полетали ардукоптер 3.6.dev на своем контроллере.
сложно сказать кто в выигрыше пиксрейсер с его новомодными сенсорами или стрый добрый комплект используемый со времен апм2
прошивка 3.6 позволяет настроить рейсерский дрон (типа 250 рамы 2205-2300kv dalprop 5045 4s) так чтобы он держал углы не хуже рейсерского с бетафляем
это видно невооруженным взглядом, если раньше как не крути пиды - начинается перекомпенсация и чудовищно пожирать батарею или недостаточно четкое соблюдение углов, особенно заметное если дать газу из падения.
собственно чем это достигнуто:
- в 3.6dev в отличии от 3.4 поменяли порядок обработки информации.
было так считывание гироакселя - расчет ориентации -расчет инерциалки-моторы. тоесть интервал между считыванием гир и моторами был продолжительный
сделали так считывание гироакселя-моторы - расчет ориентации -расчет инерциалки тоесть сократили цикл. - включили ваншот125 позволяющий работать регулям с блхели в режиме 1000шагов (с пвм они работали в режиме 255 шагов) тоесть команда управления моторами стала плавнее и точнее.
результаты - впечатление от полета в стабе как на хорошо настроенном рейсерском
- в альтхолде отлично держит высоту, несмотря на достаточно сильные вибрации и не раз покоцанные винты
- позхолд отлично держит высоту и позицию, ртл работает адекватно.
не тестили и не настраивали пока акро, не пробовали авто и другие автоматические режимы.
удалось поэкспериментировать с параметрами управляющими кривой газа, она очень влияет! и весьма полезна к регулировке на мелких коптерах
видео записывали, но оно имеет технический характер и требует рук монтажника
Полётник Пиксхавк +приёмник Х8R. Для получения RSSI на какие пины/куда присоденять/ провода из приёмника?
Какие настройки нужно вносить в пиксу?
С ув.,!
Полётник Пиксхавк +приёмник Х8R. Для получения RSSI на какие пины/куда присоденять/ провода из приёмника?
Какие настройки нужно вносить в пиксу?
С ув.,!

RSSI_PIN 103
RSSI_RANGE 3.3
Вроде бы в документации всё очень подробно описано…
Попробовал пиксхак 2.8.4 на жёсткую к раме с прошей 2.5рк8:
Всё никак не могу понять, как с самого начала в прошах под мелкие квадрики плавные графики акселей, а здесь боремся с одним и тем же от версии к версии.
Подскажите новичку, как грамотно организовать режим follow me с просмотром на смартфоне. Или где посмотреть грамотный мануал по подключению, настройке контроллера и модулей? Какие модули для этого нужны?
прошивка 3.6 позволяет настроить рейсерский дрон
Это что получается до этой версии вообще нет смысла ставить пиксрэйсера на гоночный квад?
на 3.4.4 в принцпе можно было настроить что то похожее, но не огонь…
Уважаемые форумчане, прошу помощи в анализе логов квадрокоптера.
Логи вот здесь.
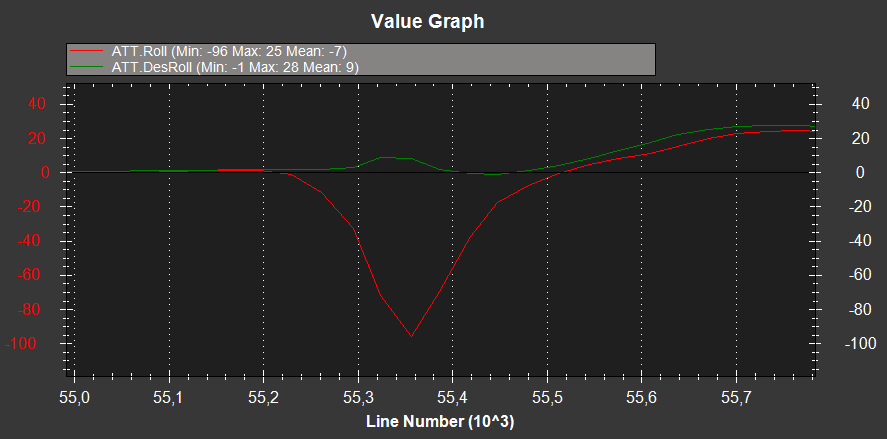
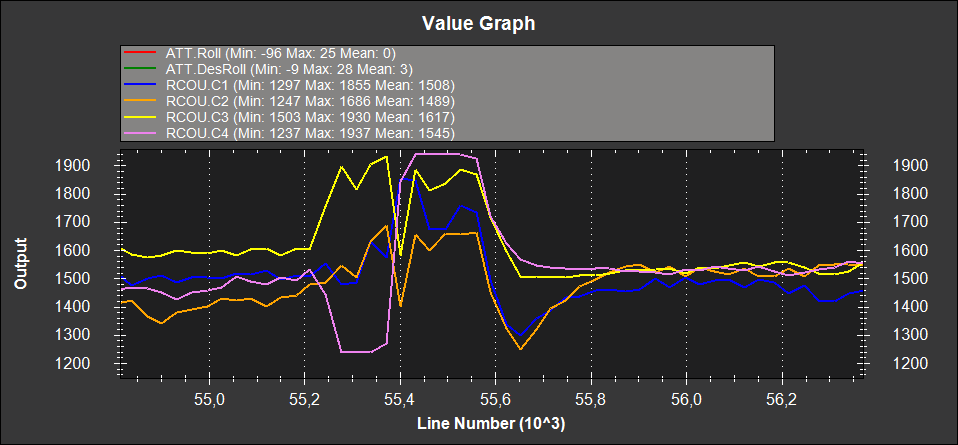
При полетах случалась следующая ситуация: в режиме loiter (хотя, это вряд-ли имеет значение) квадрокоптер вдруг внезапно переворачивается (своеобразный флип). В первый раз он не успел перевернуться полностью и все закончилось крашем, а во второй - успел и полет продолжился нормально, без нареканий (см., соответственно, первый лог - в конце, второй лог - примерно на третей минуте полета). То есть, проблема внезапная и кратковременная. Честно говоря, я ошибочно подумал - может это управляемый контроллером флип, случайно вызванный специальным движением стиков (вариант был отвергнут после прочтения документации)?
Насколько я смог понять из логов, с точки зрения контроллера - переворот совершенно неуправляемый и вызван внешними (по отношению к контроллеру) факторами. Переворот такой, будто один из моторов(номер 4?) выходит на полные обороты (ошибка контроллера мотора), или скручивается винт (с противоположной стороны; до второго раза я был уверен, что причина в этом).
Верны ли мои выводы? Кто-нибудь сталкивался с подобной проблемой?
Это мой первый квадрокоптер, налет небольшой (в общем около двух часов), но кроме этих дух отдельных случаев никакие проблем в полете не было. Во всех режимах все стабильно, четко.
Аппарат такой:
Двигатели: Sunnysky X2212
Регуляторы: DYS BL30A Mini 30A BLHeli
Контроллер: Pixhawk PX4 2.4.8 (+GPS, компас)
Момент переворота из второго лога:
на 3.4.4 в принцпе можно было настроить что то похожее, но не огонь…
а где взять 3.6 для пиксрейсера?
Камрады!
Пара тыпорылых субботних вопроса про пиксрейсер на РХ4. 😃
Как просто и без затей откалибровать компас перед полётом?
Пока калибрую (если смотрит не туда) через приложение QGC. Но там шесть положений крутить. Нет ли чего похожего на НАЗАу?
И какой прогой смотреть логи под виндой?
У буржуев все смотрят прогой под МАС.
а где взять 3.6 для пиксрейсера?
В МР вроде должна быть.
В МР вроде должна быть.
не, в мишен планере даже если включить beta firmware то там будет пока только 3.5.0 rc8
3.6dev собирается из ветки master
не, в мишен планере даже если включить beta firmware то там будет пока только 3.5.0 rc8
3.6dev собирается из ветки master
А есть где скомпиленый бинарник уже под пиксрейсер?
А есть где скомпиленый бинарник уже под пиксрейсер?
сегодняшняя сборка тут
firmware.eu.ardupilot.org/Copter/2017-06/…/PX4/
если я не ошибаюсь
пиксрейсер это v4
px4 - v1
pixhawk - v2
pixhawk2 - v3
но следует понимать что прошивки с этого сервака спецом не публикуются в широкие массы и предназначены для специально подготовленных тестировщиков
но следует понимать что прошивки с этого сервака спецом не публикуются в широкие массы
Попробовал я влить текущий стейбл в свежеиспеченного рейсера на пиксе, вообще печаль с настройкой, по этому альтернативы то и нет
Попробовал я влить текущий стейбл в свежеиспеченного рейсера на пиксе, вообще печаль с настройкой, по этому альтернативы то и нет
рейсерский дрон еще и настраивать уметь надо, со стоковыми пидами вообще не может быть речи о полете
вот тут есть настройки регуляторов и в аттаче примерные пиды под квадр 250 размера
от них можно начать
перенося свои параметры из старых прошивок надо понимать что рэйт пиды в старых прошивках переехали в секцию atc_