PIXHAWK PX4 Autopilot еще одна летающая железка

скриншот пидов и видео полета со стороны наверное помогли бы.
но судя по описанию - перекомпенсация - слишком высокий I
попробуйите Rate Roll/Pitch I уменьшить сильно (раза в два или даже три - на попробовать)
Вот скриншот рабочих пидов с торможением, это результат автотюна. “P”, в целом, сильно и не трогал. В зависимости от остальных параметров осцилляции наступают на 0,22-0,26. Потому держал в пределах 0.15-0.2. А вот как раз “I” пробовал задирать до 0.35 и опускать до 0.04. И в обоих случаях к концу батарейки проблема почти исчезала, но с установкой новой приходила. Вчера остановился на значениях P/I/D 0.185/0.08/0.005. Во всяком случае воспроизвести проблему на затяжном спуске “по-самолетному” не удалось.
Плюнул и вернул торможение, налепил электролита на регуляторы и питание платы подвеса. Попробую сегодня активно погонять, может я просто ранее не выявил это - люблю “тошнить” в полурасходах))
IMAX еще можно пoпробовать уменьшить (если это все же с I проблема) -
даже если I низкое , его вклад будет расти “медленно” , но при высоком IMAX этот вклад все равно может достигать высоких значений и “перекомпенсировать”.
признаки высокого I - обычно, 1-2 колебаниия большой амплитуды (на грани переворачиваня), при резких маневрах ( остановка , переключение режима , брошенные стики).
Спасибо! IMAX, кстати, не трогал. Посмотрю, как будет вести себя с тормозами. Если тот же результат, то буду крутить IMAX
Как и предполагал, торможение все вылечило. Летать стал как по рельсам, тьфу-тьфу))) Пример бросания стика в лоитере со скорости 25-30км/ч. (на фоне звук самолета с соседнего поля). А вчера он бы дал угла))
торможение все вылечило.
Нет лишней инерции винтов, нет переруливания.
Друзья подскажите каким параметром настраивать реакцию на отпускания стиков в режимах loiter и poshold т. е на данный момент, отпускаешь стики коптетр ещё некоторое расстояние пролетает по инерции, и не пытается отклониться в противовес, для торможения и остановки.??
Как и предполагал, торможение все вылечило. Летать стал как по рельсам, тьфу-тьфу))) Пример бросания стика в лоитере со скорости 25-30км/ч. (на фоне звук самолета с соседнего поля). А вчера он бы дал угла))
По моему опыту(если речь не идет о долголете с лопатами с полетным временем стремящемся к часу или гонках) лучше подбирать вмг таким образом что бы отсутствовала разница между с торможением или без оного… на моих аппаратах(650, 850) например есть разница “с” или “без” oneshot125 например но нет разницы “с” или “без” торможения, т.к. вмг достаточно отзывчива(легкий винт отностительно крутящего момента и мощности мотора) … при полетном времени с подвесом ~30 мин.
Торможение к сожалению дает значительное количество проблем которые практически не устранимы полностью, и соответственно это существенно снижает надежность аппарата…
что бы отсутствовала разница между с торможением или без оного…
по сути так и есть, на одних и тех же пидах летает он относительно одинаково. В плане отсутствия осцилляций, отзывчивости на РУ и противодействии ветру. Но без тормоза появился неприятный эффект после активного манёвра/остановки.
Торможение к сожалению дает значительное количество проблем которые практически не устранимы полностью
Особенно если пропы складные 17-ки))) Пару лет назад включил тормоз на 3506 c apc1345 ради эксперимента, пиды Вектора “уплыли”, коптер стал неуправляемым, моторы за минуту висения нагрелись градусов до 55 - на пределе терпения руки. А вот 2212 с dji пропами прекрасно переносят полчаса полета с подвесом в 30+ жару. После посадки моторы еле теплые. При ниже +20 моторы холодные. А в плане питания, помогла установка конденсаторов на все регуляторы, и дополнительно кинул на БЕКи. Подвес пока не дурковал. Второй такой же коптер летает на тормозах уже года 2, на конкретно этой раме и с этим ПК с октября. Кондёр только на входе питания. Но там подвес на энкодерах и не теряет i2c датчик
Друзья подскажите каким параметром настраивать реакцию на отпускания стиков в режимах loiter и poshold т. е на данный момент, отпускаешь стики коптетр ещё некоторое расстояние пролетает по инерции, и не пытается отклониться в противовес, для торможения и остановки.??
ardupilot.org/copter/docs/loiter-mode.html
- LOIT_BRK_ACCEL: max acceleration in cm/s/s while braking (i.e. pilot has moved sticks to center). Higher values will stop the vehicle more quickly
- LOIT_BRK_DELAY: the delay in seconds before braking starts once the pilot has centered the sticks
- LOIT_BRK_JERK: max change in acceleration in cm/s/s/s while braking. Higher numbers will make the vehicle reach the maximum braking angle more quickly, lower numbers will cause smoother braking…
по сути
Тут даже дело не только в регулях, беках и т.п… например на магнитометры сильно влияет, тут как бы… если не получаешь телеметрию в полете и не читаешь логи то разницы можно и не заметить… ровно до тех пор пока в следствии некорректной работы магнитометра например аппарат улетит в каком либо авторежиме и т.п. Опять же время полета и т.д., у меня даже с видео 1.2 были проблемы из за этого, бэки горели(не могу сказать 100% что по причине этого режима, но после отказа от исользования на том же аппарате больше ни одного бека не сгорело), повышенный нагрев батарей и т.д… Просто эта функция существенно снижает надежность по опыту, даже в моем случае когда абсолютно все питание, управление, гпс и т.д. зарезервировано и есть серьезный запас по хар-кам регулей и т.д…
Думаю, что чем мощнее ВМГ, тем больше негативных последствий от торможения. На высокооборотистых и маломощных, ИМХО, влияние меньше. Да и откуда там взяться сильным всплескам тока, когда один коптер “тошнит” 90% полета в авто на скорости 5м/с, а второй для видеосъемки в 100% расходах только для арма и дизарма, остальной полет в 30-60%
Опять же время полета
Время полета примерно одинаково, зависит от активности полета. 27-30 минут, что с тормозами, что без. По нагреву 4s2p из 35е, так же не заметил разницы тактильно. Повторюсь, если бы не глюки шторма с i2c датчиком, а потом и пары клонов алексмоса, то тормоза бы и не трогал. На старых пчёлах их хоть выключить можно. Пиксрэйсер третий сезон летает на 4в1 blheli_s, там не выключить. Во всяком случае в 2017 году конфигуратор не позволял, а теперь и лень лезть в рабочий коптер.
Скоро соберу еще один коптер в том же форм-факторе, постараюсь добиться корректного полета без тормоза. Ради интереса.
Извиняюсь за оффтоп
Константин спасибо огромное! как раз то что нужно
Константин спасибо огромное! как раз то что нужно
это попытка лечения симптомов а не болезни.
за точность исполнения навигационных команд отвечают стаб пиды. ни в каком режиме ни при каких обстоятельствах мулитикоптер не должен выходить за 45 углы, допускать раскачку.
если пиды stab rate не дают достаточной управляемости - значит причина механическая, например слишком неуверенный разгон пропеллеров из минимальных оборотов,
лечить его можно выбирая тайминг, увеличивая мин. обороты.
если по модификациям железа то моторы с большим моментом, больший питающий вольтаж, меньший диаметр пропов, более легкие пропы
это попытка лечения симптомов а не болезни.
за точность исполнения навигационных команд отвечают стаб пиды. ни в каком режиме ни при каких обстоятельствах мулитикоптер не должен выходить за 45 углы, допускать раскачку.
Алексей Здравствуйте! У меня нет проблем с полетом коптера, я не знаю почему вы так решили)))Просто мне захотелось сделать как на прошивке в qgrоund когда при отпускании стиков коптер притормаживает фиксируется в том месте где стики отпустили.
При помощи настроект которые дали выше я себе настроит в loiter такую возможность. Еще кстати в drift режиме тоже стал тормозить
Алексей Здравствуйте! У меня нет проблем с полетом коптера, я не знаю почему вы так решили)))Просто мне захотелось сделать как на прошивке в qgrоund когда при отпускании стиков коптер притормаживает фиксируется в том месте где стики отпустили.
При помощи настроект которые дали выше я себе настроит в loiter такую возможность. Еще кстати в drift режиме тоже стал тормозить
извините, я попутал вопросы)
отвечал по проблеме rcopen.com/forum/f123/topic287225/6681
стабилизации при включенном торможении, как то слилось и переплелось…
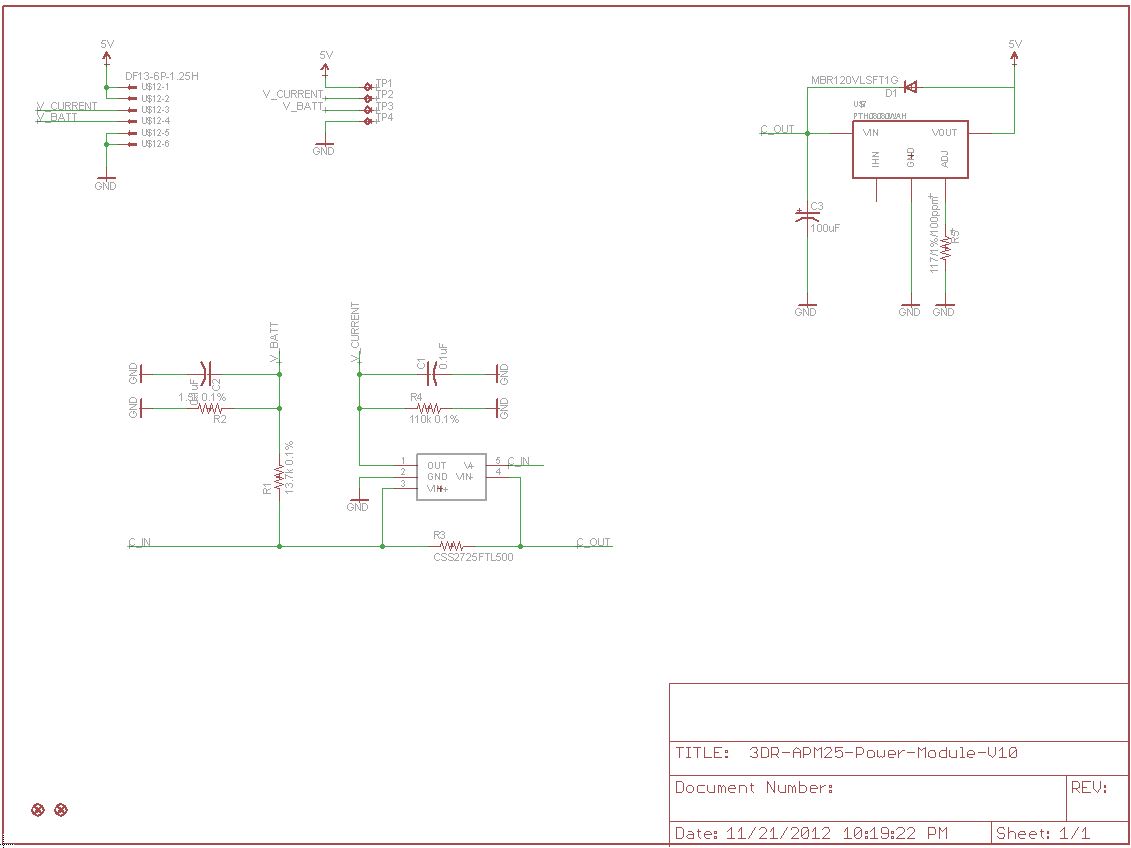
Подскажите, где можно посмотреть схему повер модуля для пикса? Отвалился диодик 😃
вообще их достаточно много вариантов, но базовый примерно такой
Не могу получить телеметрию для OSD на порт Tele2. Tele2 - это как я понимаю Serial2, вроде настроил на Mavlink.
А почему решили, что порт виноват? Порты 1 и 2 по умолчанию на Мавлинк настроены. Должно все пахать.
для OSD на порт Tele2.
а на tele1 работает? Если да, то я бы сравнил параметры sr1 и sr2