OSD Платы.

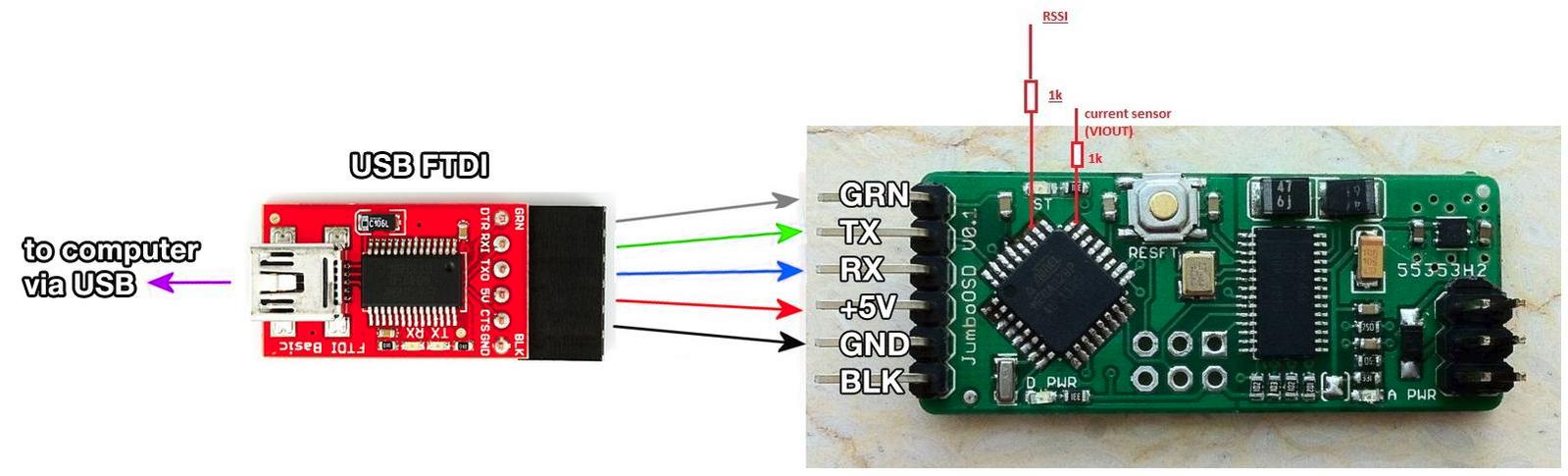
Простите за глупый вопрос, а как этот FTDI hobbyking.com/…/__24779__FTDI_Adapter_USB_Controll… подключать к minimOSD. Если напрямую-то совпадают только Tx Rx и 5v
Убрал
Очень просто 😃
есть идеии как мне справиться? да важно! я спаял перемычки, теперь все питается от ARM 2.6 родного 3DRobotics жалею что там же OSD не взял( буду МЕГА благодарен за любую подсказку!
Смотрите через передатчик-приемник?
Тогда либо уменьшать модуляцию в передатчике подстроечником, либо на входе видео на передатчике параллельно впаивать резистор номиналом 150-75 ом.
Возвращаемся к минимосд. Точнее к артефактам изображения(периодически появляющиеся тонкие линии после символов). Погонял прошивки рашдуино и апм осд обнаружил интересную особенность. В осд апм этот дефект проявляется гораздо реже, чем в рашдуино. Как оказалось, в апм видеобуфер обновляется реже (10 гц) чем в рашдуино (20 гц). Поэтому в апм дефектов изображения меньше, но все таки они присутствуют. Проанализировав исходники обеих версий обнаружил, что в обеих версиях запись данных в видеобуфер происходит не синхронно с выводом изображения. Из-за этого в момент когда данные записываются в одновременно выводимую ячейку на экран происходит коллизия. В данный момент и видим данный артефакт. Можете мне верить или не верить но это факт. Я пересмотрел множество роликов с ютюба с осд выполненной на данной микросхеме и не увидел ни одной картинки без артефакта. Все молчат и всех это устраивает. Почему я не понимаю. В даташите на макс сказано конкретно, что информацию нужно обновлять во время обратного хода кадрового синхроимпульса. Кто и что думает по поводу данной проблемы? Или всех устраивает или может я такой глазастый и один вижу эти дефекты.
okan_vitaliy тоже замечал такое, но только на телевизоре, в очках да еще и в полете на это не обращаешь внимание.
okan_vitaliy тоже замечал такое, но только на телевизоре, в очках да еще и в полете на это не обращаешь внимание.
Значит не я один такой зоркий. Ну что ? Будем лечить прошивку от артефактов? Или всех всё устраивает?
В даташите на макс сказано конкретно, что информацию нужно обновлять во время обратного хода кадрового синхроимпульса. Кто и что думает по поводу данной проблемы? Или всех устраивает или может я такой глазастый и один вижу эти дефекты.
Я думаю всем пох.
Вот лучше скажите, чего все прицепились к этому MAX’у. Ведь на STM32 (да и на AVR) можно сделать простейший OSD который будет работать не хуже, но при этом не надо никаких дополнительных дорогих микросхем. Т.е. себестоимость такого OSD будет порядка нескольких долларов (в основном цена чипа CPU). Ну и что немаловажно, его можно сделать полностью графическим, а не посимвольным(как MAX).
Вот лучше скажите, чего все прицепились к этому MAX’у.
На максе уже готовое решение, нужно только подпилить код слегка. На кортексах я готовых решений не видел. А самому писать времени не хватает. К тому же когда параллельно пишешь пару тройку проектов то в башке уже такая каша, что не до осд уже. Где то так.
На максе уже готовое решение, нужно только подпилить код слегка. На кортексах я готовых решений не видел. А самому писать времени не хватает. К тому же когда параллельно пишешь пару тройку проектов то в башке уже такая каша, что не до осд уже. Где то так.
Да я не конкретно к вам вопрос, скорее ко всем кто в теме.
Ну сделать OpenSource проект, думаю код набросают люди. Главное отработать механизм вывода и схемотехнику аналоговой части. остальное дело наживное…
(да и на AVR) можно сделать простейший OSD который будет работать не хуже,
Ну сделать OpenSource проект,
Дык есть же проекты: MobiDroneOSD, CL-OSD (G-OSD) или Вы очём то другом.
информацию нужно обновлять во время обратного хода кадрового синхроимпульса
По моему в железе не предусмотрено, т.е. контроллер просто не знает когда наступает “время обратного хода кадрового синх”.
Дык есть же проекты: MobiDroneOSD, CL-OSD (G-OSD) или Вы очём то другом.
Указанные проекты скорее мертвы, чем живы.
Всё!!! Вылечил вавку с артефактами. Теперь процедура вывода работает в 3 раза быстрее. Так что если много всяких фенечек повключать в осд то она будет меньше тормозить. Попробуйте и почувствуйте разницу.
Оперативно 😃 как раз сегодня приехал мавлинк с rctimer и я только сел собирать новый квадр
Оперативно 😃 как раз сегодня приехал мавлинк с rctimer и я только сел собирать новый квадр
Как проверите то отпишитесь. Еепромку перезаписывать не нужно, просто обновите через бутлоадер и сравните с оригинальной прошивкой 370.
А у кого нибудь показывает скорость по спутникам?))))) у себя так и не добился этого(((( Хотя у меня прошивка прошлой версии. okan_vitaliy Спасибо за работу.
okan_vitaliy обязательно! Только для начала все спаять и собрать надо, но у меня вся ночь еще))
Всё!!! Вылечил вавку с артефактами. Теперь процедура вывода работает в 3 раза быстрее.
А можно подробностей, чтобы по коду не лазить? Любопытно 😃 Со дня на день платка должна подойти, разбираться придется. Где собака порылась и как ее на кривой кобыле объехать?
поправте если не так
-SPI в два раза быстрее
-MAX7456_DrawScreen теперь связан с прерываниями и немножко по другому плюет данные в макс 😃
Ну сделать OpenSource проект, думаю код набросают люди. Главное отработать механизм вывода и схемотехнику аналоговой части. остальное дело наживное…
Вот аналоговая часть и есть самое слабое место. Сделать помехоустойчивую синхронизацию по кадрам не так просто. Например мобидрон: на столе все отлично, как только на борт ставим, прут помехи и начинается проблема с синхрой… Я за ОСД-шки на МАКС-е, т.е. с видеодрайвером…
Указанные проекты скорее мертвы, чем живы.
мобидрон вполне себе живой в терминах вия… надо лишь нюансы протокола оф. 2.2 версии адаптировать…
Вот аналоговая часть и есть самое слабое место. Сделать помехоустойчивую синхронизацию по кадрам не так просто.
И модулятор чтоб не факелил, и чтоб тени были и те которые нужны. Еще та задачка.