OSD Платы.

okan_vitaliy не получилось записать видео, easycap помер 😦 днем попробую с экрана телевизора записать))
Помогите по miniOSD v1. (mavlink)
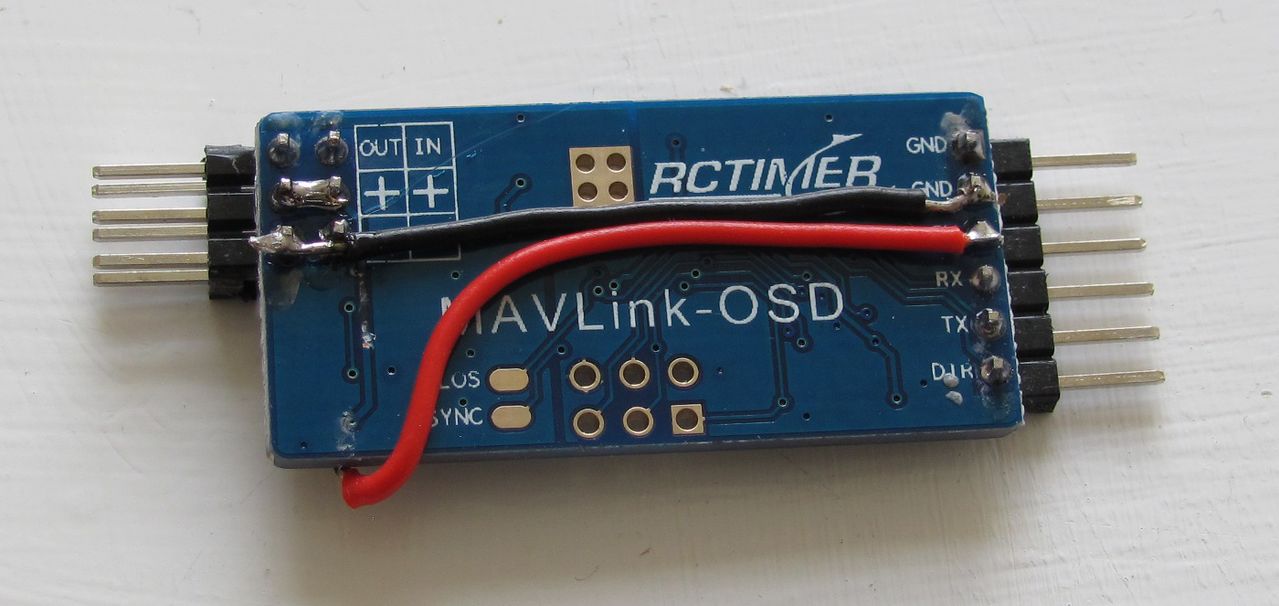
Прочитал в сети что версия 1 имеет проблемы со стабилизатором на 12В, и питание его напрямую от LIPO крайне противопоказано. Лечением написано замыкание 2- перемычек, чтоб все питалось от 5в, но моя плата на ebay куплена и на ней никаких перемычек нет. Второй вариант - установка радиатора на стабилизатор, но я не могу опознать его на плате ((. Подозреваю что это маленькая микросхемка на 6 выводов, так как ничего другого там просто нет. Но вроде не она нагревается, а плата через несколько минут работы уже горячая.
Прошу помочь в решении проблемы.
Посмотреть бы на плату. Возможно если не греется стабилизатор то там импульсный преобразователь стоит, опознать можно по большому дросселю. На моей осд с рцтаймера тоже нет перемычек, я кинул проводок +5в с цивровой части на аналоговую, а земля оказалась общей.
Прошу помочь в решении проблемы.
Как Вам смогут помочь если единственное? что известно о Вшей плате , это только то что купили на ebay.
вот фото. дроссель тоже большой. На картинке точно то, что у меня.
www.ebay.com/itm/…/160962457707
NorthStar проблемы с питанием у версии 0.1 (без стабилизатора) а 1.0 со стабилизатором и вроде как проблем не должно быть, у нас 1.0, но если очень хочется сделать 5в, то вот (www.multi-rotor.co.uk/index.php?topic=3073.0):


Прошивка KV Team OSD будет работать с MegapirateNG?
В приложении мой вариант mobidrone OSD в виде шилда для arduino nano.
Также может кому пригодится, модификация для корректной отработки арма и отображения режимов для прошивки мультивии(mahowii)2.2:
В multiwii, serial.ino добавляем в соответствующие разделы:
#define MSP_MOBIDRONE 121 //out message for mobidrone 2.3
case MSP_MOBIDRONE:
headSerialReply(10);
serialize16(cycleTime);
serialize16(i2c_errors_count);
serialize16(ACC|BARO<<1|MAG<<2|GPS<<3|SONAR<<4);
serialize32(f.ANGLE_MODE<<0|
f.BARO_MODE<<1|
f.MAG_MODE<<2|
f.ARMED<<5|
#if defined(SERVO_TILT) || defined(GIMBAL)|| defined(SERVO_MIX_TILT)
rcOptions[3]<<3|
#endif
#if defined(CAMTRIG)
rcOptions[4]<<4|
#endif
f.GPS_HOME_MODE<<6|
f.GPS_HOLD_MODE<<7|
f.HEADFREE_MODE<<9|
#if defined(FIXEDWING) || defined(HELICOPTER)
f.PASSTHRU_MODE<<8|
#endif
rcOptions[BOXBEEPERON]<<10|
#if defined(LED_FLASHER)
rcOptions[BOXLEDMAX]<<11|
#endif
#if defined(LANDING_LIGHTS_DDR)
rcOptions[12]<<12|
#endif
rcOptions[BOXHEADADJ]<<13);
break;
В mobidroneOSD.ino заменяем:
#define MSP_STATUS 101 //out message cycletime & errors_count & sensor present & box activation
На:
#define MSP_STATUS 121 //out message cycletime & errors_count & sensor present & box activation
Всем здрасьте! Помогите разобраться с fbosd gold. MiniOSD шьется, все вроде бы нормально, инфа выводится. При попытке законнектить вторую плату к программе Config ругается, пишет: убедитесь, что модем вверх ногами и провод от GPS отключен. Может что не так делаю? Пытаюсь подключиться к Конфигу без платы Мини. Может надо все в комплексе подключать?
мобидрон вполне себе живой в терминах вия… надо лишь нюансы протокола оф. 2.2 версии адаптировать…
В приложении мой вариант mobidrone OSD в виде шилда для arduino nano.
Также может кому пригодится, модификация для корректной отработки арма и отображения режимов для прошивки мультивии(mahowii)2.2:
Ну вот, наконец то кто то добрался! Спасибо!
Мой хоть и валяется, но думаю многим пригодится!
Вот и я тоже мучаюсь с minim osd,
прошил под мультивий, потом подключив 12в в видеоразъемам залил с компа шрифты ,
включил , работает ,загрузилось ,авиагоризонт шевелится ,но при арминге коптера все равно висит надпись disarm .
Припаял к меге вольтаж делитель как в их инструкции , и вывод rssi через 1к резистор , в гуи сказал показывать все , только с рсси макс не понял в каких попугаях,
короче все равно при арминге висит надпись дизарм , вольтаж никак не меняется мигает 0, хотя уже настроил чтото , и rssi тоже 0%.
Потом попробовал перешить снова , в итоге загружается заставка с версией мультивия и прошивки kv-team ,и висит … Что делать дорогая редакция?
//#define BOX_OSD_SWITCH это закоментить.
Use Box Names в гуи включить и проблема с тем что не реагирует на арм пропадет. Вообще достаточно глючная система, у меня гуи вообще не работает, ставлю все на ощупь. Но у меня 7ка и там гуй работать и не должен. По поводу рсси и вольтажа не подскажу вольтаж я беру с самого вия а рсси не пользую у меня его нет.
Вот и я тоже мучаюсь с minim osd,
прошил под мультивий, потом подключив 12в в видеоразъемам залил с компа шрифты ,
включил , работает ,загрузилось ,авиагоризонт шевелится ,но при арминге коптера все равно висит надпись disarm .
Припаял к меге вольтаж делитель как в их инструкции , и вывод rssi через 1к резистор , в гуи сказал показывать все , только с рсси макс не понял в каких попугаях,
короче все равно при арминге висит надпись дизарм , вольтаж никак не меняется мигает 0, хотя уже настроил чтото , и rssi тоже 0%.
Потом попробовал перешить снова , в итоге загружается заставка с версией мультивия и прошивки kv-team ,и висит … Что делать дорогая редакция?
Помниться у меня тоже проблема с измерением напряжений на 370той прошивке, а на 345ой нормально показывает. Всё, что сделал это тыкнул “Enable OSD Read ADC” и методом тыка подобрал настройки в гуе.
Попугаи вот так расчитываются в коде.
(RSSI) aa = ((aa-Settings[S_RSSIMIN]) *101)/(Settings[S_RSSIMAX]-Settings[S_RSSIMIN])
voltage = float(voltageRaw) * Settings[S_DIVIDERRATIO] * (1.1/102.3/4/8)
Входные напряжения должны быть не более 1,1 вольта, т.к. используется внутренний опорник.
А скорость по GPS у кого нибудь показывает, у меня все показывает и вертикальную и расстояние до точки а вот скорость не хочет(((((
У меня скорость показывает. Только координаты почему-то не могу вывести на экран.
а какие настройки выставлены для этого?
Как загрузил 370-ю ,скорость уже была.
дак скорость то есть но у меня она 0))))
и вывод rssi через 1к резистор
в итоге загружается заставка с версией мультивия и прошивки kv-team ,и висит …
Что самое интересное ,что в ГУЕ картинка не совпадает с тем что на мониторе, кроме дизарма, напряжения и время.
У меня кажется так-же, но я забил на это.