Вопросы новичка

Да, взлетает)
Если взлетает, надо летать.
Отклонения на взлёте это нормально.
Там такая мешанина потоков под коптеров творится на взлёте.
Если взлетает, надо летать.
Отклонения на взлёте это нормально.
Там такая мешанина потоков под коптеров творится на взлёте.
Ну вот у меня как в этом видео улетает сам по себе, т.е. он прям улетает, а не крутится на месте((
Только он потом триммирует на аппаратуре, но у меня в FS-i6s такого нет. Как тогда быть, подскажите, пожалуйста?
т.е. он прям улетает,
Прям улетает? Или плывет?
Повторюсь он не должен висеть на месте, у него нет GPS.
Чтобы удерживать коптер на месте без GPS, нужны нормальные такие навыки пилотирования.
Прям улетает? Или плывет?
Прям улетает, т.е. если потихоньку давать тротл, то он будет взлетать и потихоньку отдаляться.
Прям улетает, т.е. если потихоньку давать тротл, то он будет взлетать и потихоньку отдаляться.
Можно добавить небольшой трим в настройках, на 3-м экране по моему.
Но на мой взгляд проблема надумана, надо просто летать.
Это воздух и он совсем не однороден, возможно механически что то собрано не идеально.
Как прибитый он все равно висеть не будет.
Может проблема кроется как раз в том, что при выставлении минимального арминга в бетафлай звук один, а без подключения к компу (с аккумом) звук другой? Чуть мощнее как будто. Т.е. Может ли быть, что какой-то стик (roll или pitch) нажат на 1-2%?
Может проблема кроется как раз в том, что при выставлении минимального арминга в бетафлай звук один, а без подключения к компу (с аккумом) звук другой? Чуть мощнее как будто. Т.е. Может ли быть, что какой-то стик (roll или pitch) нажат на 1-2%?
Ну дак проверьте показания по каналам на вкладке Receiver.
Должны быть все каналы 1500.
Ну дак проверьте показания по каналам на вкладке Receiver.
Должны быть все каналы 1500.
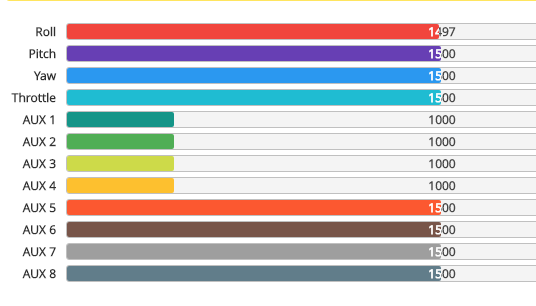
Вот у меня ролл то 1497, то 1502-3, тримирровал его на аппе, не помогает, всё равно то 1497, то больше на 2-3 процента. Может из-за этого?
Доброго . Подскажите пожалуйста новичку . какие подшипники стоят на racerstar racing edition 2205 br2205 2300kv ?
Да вроде в пределах погрешности.
Доброго . Подскажите пожалуйста новичку . какие подшипники стоят на racerstar racing edition 2205 br2205 2300kv ?
Думаю никто эти моторы не разбирал.
Подшипники меняются заменой всего мотора.
В бетафлай в настройках пидов есть два профиля, можно ли как-то задать их переключение на аппаратуре?
Или как их вообще выстраивать тогда прямо в полёте?
Купил защиту для моторов и прокладки от вибрации.Их обе ставить? В каком порядке?
взлетаю на 4 см и сажусь, а квадрик начинает прыгать и пытаться улететь что ли, но стик газа на нуле… это мне что надо калибровать?
взлетаю на 4 см и сажусь, а квадрик начинает прыгать и пытаться улететь что ли, но стик газа на нуле… это мне что надо калибровать?
Ничего! Надо идти летать.
На посадке делаем ДизАрм и всего делов.
В бетафлай в настройках пидов есть два профиля, можно ли как-то задать их переключение на аппаратуре?
Или как их вообще выстраивать тогда прямо в полёте?
А зачем профили ПИДов менять в полёте?
Ничего! Надо идти летать.
На посадке делаем ДизАрм и всего делов.А зачем профили ПИДов менять в полёте?
Ну хз, может для разных задач. Но отвечу вопросом на вопрос - а как редактировать пиды в полёте?
Ну хз, может для разных задач. Но отвечу вопросом на вопрос - а как редактировать пиды в полёте?
Ну хз, может для разных задач. Но отвечу вопросом на вопрос - а как редактировать пиды в полёте?
И я вопросом на вопрос, а зачем редактировать ПИДы в полёте? Более того, зачем их вообще трогать?
И я вопросом на вопрос, а зачем редактировать ПИДы в полёте? Более того, зачем их вообще трогать?
Ну как мне сказали по моему видео “если всё откалибровано и всё исправно, то явно с пидами проблема, его жутко колбасит и дрейфует он из-за этого”
Вот, посмотрите, пожалуйста:
drive.google.com/open?id=0B4G7jERomUrOU2tKLXhKcC03…
drive.google.com/open?id=0B4G7jERomUrOaU1wN1RlZDdw…
А если аппа не поддерживает такие настройки?
Ну как мне сказали по моему видео “если всё откалибровано и всё исправно, то явно с пидами проблема, его жутко колбасит и дрейфует он из-за этого”
Вот, посмотрите, пожалуйста:
Ну что то какой тот не хороший звук присутствует в конце, похожий на осцилляции.
В остальном по моему нормально летает.
Надо включать FPV и лететь.
А у вас Еачин же?
Просто все современные, даже дешевые комплектующие, летят из коробки, я уж и не помню когда в ПИДы лазил.
Загляните в ветку великомучеников, свидетелей Еачинов, там много специалистов по настройке ПИДов, даже под конкретный пропеллер свои ПИДы подбирают.
А если аппа не поддерживает такие настройки?
Я бы простотвзялтс собой ноутбук и им настраивал.
Крутнул, взлетел, посмотрел.
Надежней так.
Я бы простотвзялтс собой ноутбук и им настраивал.
Крутнул, взлетел, посмотрел.
Надежней так.
Ну да, и это думаю единственный вариант. Спасибо.
его жутко колбасит и дрейфует он из-за этого"
Ну да, как написано уже - немного ПИДы подправить (я бы и не заметил), а то, что его тянет - подтриммировать немного (т.е. наклон контроллера задать в противоположную сторону) и не будет тянуть (если акум по центру масс).
Или как их вообще выстраивать тогда прямо в полёте?
“Погуглите” на ютубе (да и здесь в темах часто бывает) видео по настройке пидов, есть пара толковых. Там в конфигураторе на крутилку и тумблер назначаем регулировку и прямо в полёте “подкручиваем”.
После краша , на высоких оборотах начал дёргаться один мотор . В чём может быть проблема ?
Направьте, где можно почитать, или поясните, пожалуйста, кто может, физику процессов происходящих при различных критичных режимах. Вот пусть есть квадрокоптер веса G, нормально летающий на моторах M с пропеллерами P на батарее nS, и я буду менять эти параметры в различных комбинациях. Калькулятор говорит результат, но я не всегда знаю, как его интерпретировать.
- Если я ставлю слишком большие пропеллеры, моторы не могут их прокрутить, начинают пропускать через себя ток приближающийся к stall current и сгорает (если регуль раньше не сгорит) - так это или нет? Калькулятор при этом будет показывать превыщение электрической мощности, так?
- Если я ставлю слишком маленькие пропеллеры, моторы их крутят легко, тока потребляют мало, в пределе free current, но тяга мала и ее не хватает, чтобы обеспечить тяговооруженность больше единицы и квадрик не взлетает. Калькулятор при этом говорит, что энергии не достаточно для висения, так?
- Если я меняю вес, потребляемая мощность меняется мало, меняется только тяговооруженность. Слишком малого веса не бывает, а слишком большой просто не взлетит, но так как потребление при этом меняется мало, то перегруженный квадрик именно что просто не взлетит, но моторы не сгорят, в отличие от слишком больших пропеллеров, так?
-
Что значит прокрутить пропеллер? Если поставить пропы, при которых максимальный ток приближается или немного превышает максимальный ток мотора и/или регулятора может быть всякое.
А именно: Если квадрик достаточно легкий и предназначен для съемки и неспешных полетов - то скорее всего он полетит и не сгорит, так как 100% газ вряд ли будет использоваться часто. Если квадрик гоночный - и интенсивная работа газом это стандарт, то тут уже будет зависеть от внутреннего запаса прочности использованных комплектующих - есди не сгорит, то греться будет. -
Так
-
Слишком малый вес бывает с точки зрения эффективности и устойчивости.
Допустим у нас есть гипотетическая рама с нулевым весом. Соответственно момент инерции тоже будет нулевой. И сопротивляемость порывам ветра также окажется низкой.
Направьте, где можно почитать, или поясните, пожалуйста, кто может, физику процессов происходящих при различных критичных режимах. Вот пусть есть квадрокоптер веса G, нормально летающий на моторах M с пропеллерами P на батарее nS, и я буду менять эти параметры в различных комбинациях. Калькулятор говорит результат, но я не всегда знаю, как его интерпретировать. 1) Если я ставлю слишком большие пропеллеры, моторы не могут их прокрутить, начинают пропускать через себя ток приближающийся к stall current и сгорает (если регуль раньше не сгорит) - так это или нет? Калькулятор при этом будет показывать превыщение электрической мощности, так? 2) Если я ставлю слишком маленькие пропеллеры, моторы их крутят легко, тока потребляют мало, в пределе free current, но тяга мала и ее не хватает, чтобы обеспечить тяговооруженность больше единицы и квадрик не взлетает. Калькулятор при этом говорит, что энергии не достаточно для висения, так? 3) Если я меняю вес, потребляемая мощность меняется мало, меняется только тяговооруженность. Слишком малого веса не бывает, а слишком большой просто не взлетит, но так как потребление при этом меняется мало, то перегруженный квадрик именно что просто не взлетит, но моторы не сгорят, в отличие от слишком больших пропеллеров, так?
физика, так сказать, на пальцах
- слишком большой проп (увеличенный шаг) ведет к увеличению потребляемой мощности: большему количеству воздуха передается кинетическая энергия ((mV^2)/2). которая, к тому же может быть больше за счет увеличенного шага (при той же угловой скорости). это означает больший отбор мощности от источника энергии (аккумулятора).
далее возможны разные сценарии.
если напряжение недостаточно, то регуль просто не сможет раскрутить винт до задаваемой скорости (ток в обмотке не будет успевать нарастать до значения, обеспечивающего нужный момент на валу: di/dt=U/L). но это же и защитит регуль и обмотки двигателя от перегрева. а может не защитит
если батареи достаточно для раскрутки пропеллера до скорости заданной пк, то да, сгореть может. либо регуль, либо мотор, либо оба. если максимальный ток будет превышен. хотя что это за регуль, если не имеет ограничения по рабочему току. выход здесь может быть такой: в настройках прописать максимальную длительность не 2000 мкс, а ту, при которой двигатель еще не перегревается (еще лучше, если бы была возможность тупо забить предельный ток регуля, может такая возможность и есть). правда платой за это будет снижение диапазона регулирования - здесь можете рассмотреть предельный случай маленького пропеллера - совсем без пропеллера. движок на холостом ходу, потребление минимальное. 100% безопасный режим. правда и летать не будет
- тяга указывается в граммах, можно перевести в ньютоны. разница между тягой и весом - это и есть та сила, которая двигает квадрик вверх (точнее - меняет его скорость). разделив эту силу на массу самого квдрика вы получите достижимое ускорение, что покажет вам динамику всего устройства. чем выше разница между тягой и весом и чем меньше масса квадрика, тем динамичнее он сможет двигаться. если тяга равна весу - получите нулевой баланс и квадрик в соответствии с 1 законом ньютона будет двигаться равномерно и прямолинейно (как частный случай - неподвижно висеть)