Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

а чем вас свист смущает?
а чем вас свист смущает?
Я уже вычитал, что никакого криминала в этом нет, но чисто морально как-то не по феншую…
и мощность падает(((
И сильно падает?
но чисто морально как-то не по феншую…
так на летящем квадре вы его все равно не услышите)))
так на летящем квадре вы его все равно не услышите)))
Я хотел-бы сделать из него “универсального солдата” - чтобы и как стедик можно было-бы использовать.
Есть воттакая плтата-контроллер 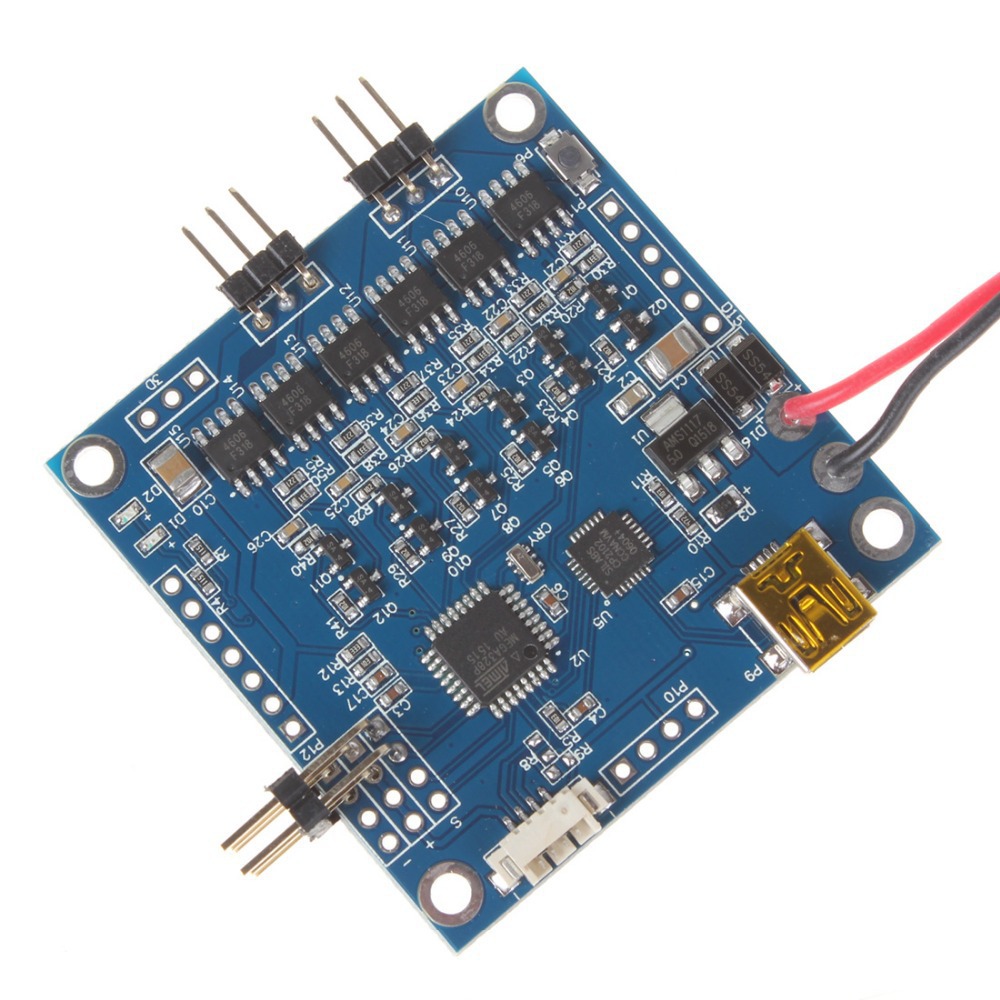
В последнем полете умудрился оторвать разъём МиниUSB. Подскажите пожалуйста какие контакты к какой дорожке лепить. Нифига не вижу.
Подскажите насколько необходимо делать вторую точку крепления для оси питча?ведь на многих подвесах ось питч крепится только на моторе
Подскажите насколько необходимо делать вторую точку крепления для оси питча?
Если не хотите проблем с настройками, вторая точка вам в помощь. Многие подвесы , на одном моторе, много кровушки своих владельцев попили.
лично у меня с этим никаких проблем,запустился с первого раза,предполагаю что одна точка крепления увеличивает нагрузку на ось мотора,и увеличивает вибрации на этой оси.
Подскажите пожалуйста какие контакты к какой дорожке лепить.
Разводка разъёма - www.sunrom.com/media/…/USB-Mini-B-Pinout.gif
По Вашей картинке - слева направо. Питание, data-, data+, пустой, земля.
data-, data+ ко картинке ухадят налево, к usb-serial конвертору. Питание - вверх.
Подскажите, как идеологически правильно сделать так:
На аппе тумблер в одном положении - ось yaw заблокированна в одном положении или включен follow.
В другом положении тумблера - стабилизирует.
Через переключение профилей как мне кажется неправильно, в случае надобности в изменениях нужно менять сразу в двух профилях.
32bit контроллер. Приёмник подключен по sbus, свободные каналы есть.
Разобрал весь подвес, отделил контроллер. Провода теперь не идут рядом (на датчики и моторы). Дрейф теперь не такой бешеный, но немного есть. “serial data corrupted” все-равно присутствует. Подскажите где искать, а то у меня идеи заканчиваются. Может запилить экранированные провода?
у меня есть такая же плата , а какой софт для неё ? я что уже только не пробовал, не видит его и все
По любому что то должно определиться. Если даже нет неизвестного устройства - значит что то не так аппаратно. А если видит и дрова не можешь найти - то через ID свойства устройства - копируешь любую строку из того что покажет и я ищу на сайте devid.inf(не реклама) - там практически всегда находит нужные дрова.
Пользователи поделитесь ,сколько ставите параметр сглаживание для камеры около 1 кг весом при съемке с воздуха.
Начал летать с подвесом по сравнению с первым полетом уже лучше (подстроил ПИДы) ,но результат не радует,может кто подскажет на что обратить внимание. У меня в первую очередь под подозрением демпферы, стоят 4 штуки видимо своего литья без отверстий.
Винты балансировал тщательно ,моторки Тмотор вроде следы балансировки присутствуют
Начал летать с подвесом по сравнению с первым полетом уже лучше (подстроил ПИДы) ,но результат не радует,может кто подскажет на что обратить внимание
Поделитесь конфигурацией железа, что за подвес, камера, какой контроллер и какие настройки (можете файл с настройкми выложить). В целом видео стабильное но есть немного желе (т.е. вибрации все же есть), и потряхивает оси ROLL и YAW. К сожалению, это достаточно сложно исправить, нужно много чего перепробовать. Основное - стараться убирать вибрации всеми способами.
Здравствуйте Алексей, подвес купил у поляк стояла платка оригинальная ,но как Юра предположил что крякнула по причине неправильного сенсора .Сейчас стоит тоже 32 бит от Юры с Батайска . Подвес был бракован просажены все подшипники ,но поляки дали все что нужно и я его вроде наладил, нет люфтов и правильная геометрия ,подвес такой только изменена рамка и сделана раздвижная под камеру Никон 5100. Общий вес, камера+ линза + подвес ровно 2,5 кг. По вибрациям ,пробовал стягивать тросиком ,результата особого нет. Хочу еще попытаться карбоновые винты 15/5,5 заменить на оригинальные АПС 14/4,5 и проверит. Но вот заметил при полете вверх и вперед ,создается тяга и болтанка меньше ,но мне от такого варианта не легче 

Да забыл ,подвес такой www.shothuntershop.eu/…/pocket-gimbal
Прошу прощения два скрина одинаковых
Александр: Попробуйте прошивку 2.59b (бета), там много чего изменилась, в том числе хорошая автонастройка PID - как правило, настраивает лучше, чем вручную. Если стоит второй IMU - есть новая опция “Use frame IMU for stabilization” - отключите ее, не будет приходить сигнал вибраций с рамы (если они там есть), или подберите фильтр в окошке ниже.
Алексей ,один источник поперечных колебаний я нашел и удалил это крепление на “палец” Таррот checkitlink.com/bookmarks/away?away=http%3A%2F%2Fr… Карбоновые трубки за которые крепился подвес немного при раскачке проворачивались и создавали поперечную балтанку . Нужно провести тест и конечно воспользуюсь Вашими рекомендациями. Алексей, а нельзя ли сделать программу что бы она разворачивалась на весь экран,для очкариков было бы очень удобно😁
автонастройка PID
А для восьмибитных ожидается?