подвес на бк моторах (open source) от немцев

Лень сег уже вставать 😃 Завтра сделаю.
Какие значения PID выставлены на оси?
Что-то с дропбокса фоту=ки не вставляются. Скачайте скриншот по ссылке:
и точно такой же прошивкой
Я правильно понимаю, что 2.2b2 не найти отдельно, а можно купить только с платой? А то у народа, смотрю, гуй пашет, а моторки не крутятся.
Коллеги, нужен ваш совет. Дошли руки до подвеса. Встал вопрос с питанием, борт питается от 3S, хочу от этой же батарейки питать подвес, но слышал что надо страховаться от просадки. Сначала хотел поставить преобразователь на LM2596, но потом прикинул что с учетом просадки скажем до 3.3 на банку остается всего 9.9В, да еще преобразователь сожрет порядка 2В, итого остается всего стабильных 7.9В. Достаточно ли этого будет для самопального подвеса на моторах рцтаймер 2804 и камеры Explorer HD. Или может ставить Step-Up/Step-Down преобразователь и держать стабильное напряжение 10-12В? А может поставить делитель для измерения напряжения что-бы контроллер учитывал просадку акб, работает это?
И еще вопрос, понимаю что уже обсуждался не раз, тыкните пожалуйста, как правильно разместить датчик (ориентация)?
Обычно вниз деталями вправо проводами,а насчет питания-проверяю лабораторным блоком,налаживаю подвес,меняю напругу,если не дергается,оставляю.Обычно от 12 до 8 вольт . Дергается-ставлю бек.Потребление у подвеса в среднем от 100 до 300 мА на прохе.
вправо проводами
У меня влево 😃 Если смотреть изнутри гоупрошки наружу =)
И еще вопрос, понимаю что уже обсуждался не раз, тыкните пожалуйста, как правильно разместить датчик (ориентация)?
Главное, чтобы ровно. А направление - как удобней. В GUI можно поменять оси X и Y и инвертировать Z.
Главное, чтобы ровно. А направление - как удобней. В GUI можно поменять оси X и Y и инвертировать Z.
Только вот на много проще настраивать направление гироскопов ДО того, как приклеишь его к креплению. Когда крутишь датчик в руках, сразу видно, куда дёргаются моторы, и сразу понятно, надо инвертировать или нет. А когда присобачил, всё уже. Идёт дёрготня, а из-за чего она идёт… загадка. Разгадку выше где-то писали, конечно, т.к. я всю тему читал, но найди поди её 😃
А, вот, я себе её в текстовичок засолил. Цитата:
По поводу реверса моторов, не давал покоя вопрос. И так и так вроде работает.
Давеча решил еще поковырять.
И вот какой метод определения реверса нашел:
Убираем на исследуемой оси PID-ы в 0, ось обмякает, камера заваливается. Сдвигаем немного слайдер “P”
Если при сдвигании “P” от нуля ось дергается сторону выравнивания горизонта - ОК, Если усугубляет ошибку - реверснуть.
На моем подвесе с рцтаймера действует четко и исключает двоякое толкование реверсов.
как приклеишь его к креплению
У меня датчик на винтах крепится. С одной стороны, проще снять-поставить, с другой - нет особой свободы выбора ориентации.
Чет вы спутали теплое с мягким
реверс моторов не имеет отношения к реверсу оси Z и Swap XY
Чет вы спутали теплое с мягким
Смысловая нагрузка: сначала в руках семь раз поверти, потом один раз клей. Если на болтах, другое дело.
А так, вы написали правильно. Действительно не имеет.
А кто нибудь уже подключал прошивку SimpleBGC_2_2b2_null.hex?
А кто нибудь
Прямо на этой странице нажимаете CTRL+F, и пишете “2.2”
Подскажите, на ручное управление подвесом переменным резистором (ну или двумя, или джойстиком резисторным) - на какой номинал он должен быть? Сколько кОм? Есть какой-то диапазон от скольких до скольких кОм можно ставить, или все-равно и с любым будет работать?
ручное управление подвесом переменным резистором
На обсуждаемой плате разве это возможно? Кто-то спрашивал несколько страниц назад, и писал, что только на алексмосе всё просто сделать, а тут затык.
Я уже запутался кто есть немецкий, кто русский. Все китайцы!
Вот эта обсуждаемая плата:
МК АТмега328, заливаем туда что хотим, хоть свою программу пишем. У меня приехала плата с прошивкой АлексМос, GUI 2.2, там есть выбор ШИМ, АНАЛОГ и PPM какой-то. Сейчас меня аналог интересует, а точнее разброс номиналов переменных резисторов, которые можно подключать вот к тем симпатичненьким разъемам справа с надписями ROLL и PITCH.
Я уже запутался
Не мудрено. Спросите у Дениса: rcopen.com/forum/f123/topic314607/1143
т.к. ему так и не ответили, кажется. Может он всё таки сделал.
PPM какой-то
Это вам не надо, но в качестве ликбеза www.rcdesign.ru/articles/radio/ppm_pcm
Сейчас меня аналог интересует, а точнее разброс номиналов переменных резисторов, которые можно подключать вот к тем симпатичненьким разъемам справа с надписями ROLL и PITCH.
обычно, на аналоговый вход подключают переменник 10кОм.
этого номинала обычно достаточно для подтяжки любого пина (если это постоянный резистор), там не страшно, если кнопка соединит резистор двумя концами к питанию и земле.
а в качестве переменного резистора можно использовать любой номинал, что выше 10кОм. по факту у этого резистора концы будут как раз между питанием и землей, а вот центральный отвод будет давать различное напряжение в зависимости от положения ручки, но какой бы вы резистор ни взяли бы - результат для контроллера будет одинаковый. Для примера взял картинку с сайта ардуино (это же атмега8/168/328 только в оболочке) arduino.cc/en/Tutorial/ReadAnalogVoltage
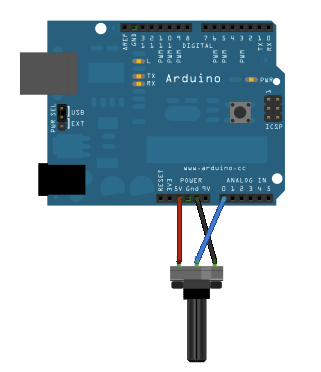
Синий - это провод, который пойдет к пину ROLL или PITCH на плату в Вашем случае
То, что надо! Спасибо! От 10кОм и выше. Поставлю 47кОм.
Если Денис читает - пусть тоже знает 😃
Ну и понятно, что крайние выводы переменного резистора к (+) и (-), средний - к управляющему.
От 10кОм и выше. Поставлю 47кОм.
Чем больше сопротивление, тем меньше ток, который пойдет через всю эту систему -> тем меньше энергии на нагрев будет уходить
Прямо на этой странице нажимаете CTRL+F, и пишете “2.2”
Ok, люди кинете тогда заведомо рабочую прошивку 2.2b2. С той что у меня ГУИ подключяется, но подвес не настроить (трясётся), хотя на 2.1 всё работало.