подвес на бк моторах (open source) от немцев

вправо проводами
У меня влево 😃 Если смотреть изнутри гоупрошки наружу =)
И еще вопрос, понимаю что уже обсуждался не раз, тыкните пожалуйста, как правильно разместить датчик (ориентация)?
Главное, чтобы ровно. А направление - как удобней. В GUI можно поменять оси X и Y и инвертировать Z.
Главное, чтобы ровно. А направление - как удобней. В GUI можно поменять оси X и Y и инвертировать Z.
Только вот на много проще настраивать направление гироскопов ДО того, как приклеишь его к креплению. Когда крутишь датчик в руках, сразу видно, куда дёргаются моторы, и сразу понятно, надо инвертировать или нет. А когда присобачил, всё уже. Идёт дёрготня, а из-за чего она идёт… загадка. Разгадку выше где-то писали, конечно, т.к. я всю тему читал, но найди поди её 😃
А, вот, я себе её в текстовичок засолил. Цитата:
По поводу реверса моторов, не давал покоя вопрос. И так и так вроде работает.
Давеча решил еще поковырять.
И вот какой метод определения реверса нашел:
Убираем на исследуемой оси PID-ы в 0, ось обмякает, камера заваливается. Сдвигаем немного слайдер “P”
Если при сдвигании “P” от нуля ось дергается сторону выравнивания горизонта - ОК, Если усугубляет ошибку - реверснуть.
На моем подвесе с рцтаймера действует четко и исключает двоякое толкование реверсов.
как приклеишь его к креплению
У меня датчик на винтах крепится. С одной стороны, проще снять-поставить, с другой - нет особой свободы выбора ориентации.
Чет вы спутали теплое с мягким
реверс моторов не имеет отношения к реверсу оси Z и Swap XY
Чет вы спутали теплое с мягким
Смысловая нагрузка: сначала в руках семь раз поверти, потом один раз клей. Если на болтах, другое дело.
А так, вы написали правильно. Действительно не имеет.
А кто нибудь уже подключал прошивку SimpleBGC_2_2b2_null.hex?
А кто нибудь
Прямо на этой странице нажимаете CTRL+F, и пишете “2.2”
Подскажите, на ручное управление подвесом переменным резистором (ну или двумя, или джойстиком резисторным) - на какой номинал он должен быть? Сколько кОм? Есть какой-то диапазон от скольких до скольких кОм можно ставить, или все-равно и с любым будет работать?
ручное управление подвесом переменным резистором
На обсуждаемой плате разве это возможно? Кто-то спрашивал несколько страниц назад, и писал, что только на алексмосе всё просто сделать, а тут затык.
Я уже запутался кто есть немецкий, кто русский. Все китайцы!
Вот эта обсуждаемая плата:
МК АТмега328, заливаем туда что хотим, хоть свою программу пишем. У меня приехала плата с прошивкой АлексМос, GUI 2.2, там есть выбор ШИМ, АНАЛОГ и PPM какой-то. Сейчас меня аналог интересует, а точнее разброс номиналов переменных резисторов, которые можно подключать вот к тем симпатичненьким разъемам справа с надписями ROLL и PITCH.
Я уже запутался
Не мудрено. Спросите у Дениса: rcopen.com/forum/f123/topic314607/1143
т.к. ему так и не ответили, кажется. Может он всё таки сделал.
PPM какой-то
Это вам не надо, но в качестве ликбеза www.rcdesign.ru/articles/radio/ppm_pcm
Сейчас меня аналог интересует, а точнее разброс номиналов переменных резисторов, которые можно подключать вот к тем симпатичненьким разъемам справа с надписями ROLL и PITCH.
обычно, на аналоговый вход подключают переменник 10кОм.
этого номинала обычно достаточно для подтяжки любого пина (если это постоянный резистор), там не страшно, если кнопка соединит резистор двумя концами к питанию и земле.
а в качестве переменного резистора можно использовать любой номинал, что выше 10кОм. по факту у этого резистора концы будут как раз между питанием и землей, а вот центральный отвод будет давать различное напряжение в зависимости от положения ручки, но какой бы вы резистор ни взяли бы - результат для контроллера будет одинаковый. Для примера взял картинку с сайта ардуино (это же атмега8/168/328 только в оболочке) arduino.cc/en/Tutorial/ReadAnalogVoltage
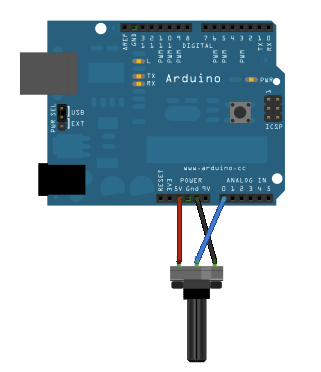
Синий - это провод, который пойдет к пину ROLL или PITCH на плату в Вашем случае
То, что надо! Спасибо! От 10кОм и выше. Поставлю 47кОм.
Если Денис читает - пусть тоже знает 😃
Ну и понятно, что крайние выводы переменного резистора к (+) и (-), средний - к управляющему.
От 10кОм и выше. Поставлю 47кОм.
Чем больше сопротивление, тем меньше ток, который пойдет через всю эту систему -> тем меньше энергии на нагрев будет уходить
Прямо на этой странице нажимаете CTRL+F, и пишете “2.2”
Ok, люди кинете тогда заведомо рабочую прошивку 2.2b2. С той что у меня ГУИ подключяется, но подвес не настроить (трясётся), хотя на 2.1 всё работало.
люди
в личку.
в личку.
Ваша прошивка 2.2b2 заработала. Спасибо.
Алекса туды впаять 😃
Я решил на него всё таки перепрыгнуть.
Так и сделал >>
родной контроллер никак ни наладил
Так и сделал
Меня интересует, как работает тот синенький с NEX’ом? Это HK, как я понимаю. Поток от винтов его не сбивает?
Так и сделал >>
ЭЛТ монитор, С-90, бабинник!!! И чудо инженерной мысли - квадрики ^_^
Я щас тоже 2.2b2 впаял. 207й немец только жужжит.
Щас батарею заряжу, опробирую на улице. Вытаскивал на открытый балкон, горизонт не завалился вроде у камеры. Там +5 щас.