NAZA-M LITE

помогите начинающему назаводу, можно ли подключить регули на батарею 4S а назу на отдельную батарею 2S?
можно ли подключить регули на батарею 4S а назу на отдельную батарею 2S?
Можно, но смысла нет… Вы потеряете возможность контроля силовых батарей и автопосадки при критическом напряжении на них… Даже если Вам это не нужно, все равно непонятно зачем… Наза потребляет мало, не больше 0.5 ампера… А таскание дополнительного веса, в виде второй батарейки, в те же полампера и выльется…ИМХО
просто ищу причину почему переворачивает коптер при старте. а меня какой то бес укусил назу на 2S подключить из связки 4S (2S+2S) вот и думал что может причина в этом. Сейчас назу подключил на 4S но не проверял еще.
а так регули откалибровал, назу поставил по стрелке, 20 раз проверил подключение последовательности регулев к назе и пропеллеров согласно схемы назы QX, откалибровал стики в программе, а ее все равно переворачивает при старте.
ну еще раз проверьте направление вращения винтов,проверьте при калибровке назы в ассисте как ведут себя аксели
Последовательность моторов правильная? Должно быть против часовой стрелки 1< - 2> - 3< - 4> стрелками направление вращения указано…
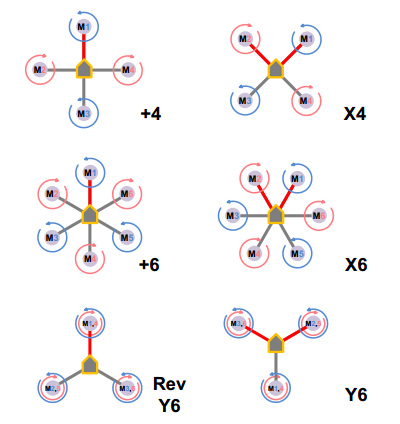
схема x4

так все у меня
Да визуально то понятно… А как разъемы в назу воткнуты? Если переворачивает, значит либо одн мотор не в ту сторону крутит или два луча наоборот подключены…
Сделайте пару раз арм-дизарм, убедитесь что все моторы крутятся правильно… Выставьте газ около 20% (по стику) и не взлетая порулите влево-вправо, вперед-назад… Посмотрите, точно ли коптер в нужные стороны наклоняется…
Naza M Light + GPS
Прошивка 1,0, Софт 1,0
В DJI NAZA-M LITE Assistant во вкладке IMU Сalibration показывает
Acceleration
x 0.4(меняется когда квадр двигаешь) y -15.9(постоянно) z-1.1(постоянно)
Соответственно в момент взлёта квадр переходит в штопор и впарывается в землю.
Перепрошивал, не помогло.
Как исправить данную проблему?
переворачивает коптер при старте
однозначно или нарушена схема подключения моторов к мозгам, или моторы не в правильные стороны крутят или пропеллеры неправильно прикручены к моторам или в ассистанте не правильно указан тип коптера. Вы не забываете в ассистанте после выставления параметров их сохранять?
батарейки здесь не причем
Как исправить данную проблему?
на ветке про назу М давно давно была такая трабла с залипанием датчика…- попробуйте поискать… ну и еще раз перепроверить сборку механики и настройку электроники - начиная с пульта управления - (авиамодель, никаких триммеров, миксов и двойных расходов)
всем спасибо, провода 3 и 4 го регуля в раме перепутались, выяснил поочередным подключением регулей к назе.
на ветке про назу М давно давно была такая трабла с залипанием датчика…- попробуйте поискать… ну и еще раз перепроверить сборку механики и настройку электроники - начиная с пульта управления - (авиамодель, никаких триммеров, миксов и двойных расходов)
не могу найти. буду благодарен за ссыль
ничего не переподключал - такое поведение контроллера после краша стало наблюдаться
такое поведение контроллера после краша стало наблюдаться
Отключите от назы все провода (регули), в ассистанте понажимайте кнопку дефолт на всех вкладках, там где есть изменяемые данные понажимайте кнопку записи после дефолта…
Затем положите назу на ровный стол, лучше по уровню, но можно и без… И откалибруйте IMU… Если не поможет, попробуйте “уронить” назу на что-то не слишком твердое, положите на пол кусок поролона, например, сантиметров с 30-50… Надо ронять так, чтобы наза дном падала… Само собой, надо подключать к компу и смотреть что получилось…
Проблема решилась следующим образом.
Назу отсоединить от всего, снять с рамы и аккуратно постучать чем нибудь тяжёлым, но мягким. Видать, если при краше вместе с ударом пропадает питание (отрывает провода), “залипает” акселерометр.
Тестово полетал в полуметре от земли вроде норм.
Naza M Light + GPS, в настройках остановки двигателей - “Быстрый” (не интеллектуальный).
Хочу проделать следующее: высоко подымаюсь, опускаю полностью стик газа, моторы выключаются, квадр падает (режим ATTI + GPS).
Потом делаю комбинацию запуска моторов. Все будет нормально? Моторы запустятся и горизонт словит?
Или получится горстка запчастей для последующей сборки квадрика? 😉
Дык попробуйте и нам расскажете
всем спасибо, провода 3 и 4 го регуля в раме перепутались, выяснил поочередным подключением регулей к назе.
вот и у меня такая фишка была на гексе.сейчас летает как по рельсам.GPS держит. даже между горожей. железо кругом и леп рядом.калибровать компас ездил на колхозное поле.от машины отошел метров 50.все ключи .мобилы и тп.оставил в авто.результат обалдеть.раньше были мозги CRIUS V1.
Потом делаю комбинацию запуска моторов. Все будет нормально? Моторы запустятся и горизонт словит?
Или получится горстка запчастей для последующей сборки квадрика?
Я пробовал, при пикирование с большой высоты нечайно заглушил, моторы запустились и нормально сел.
Мужики, подскажите, что может быть. Квадрик с лайт назой нормально летал довольно долго. И точку держал и высоту - все было ОК. Но последние пару запусков меня расстроили. Высоту вообще не держит и позицию тоже. Постоянно приходиться отлавливать, причем существенно. Какие-то непонятные эволюции выполняет. В ЖПС режиме летается хуже, чем в ручном. Хотя вся инициализация проходит нормально. Ищет спутники - находит. В асистенте тоже все в норме. Стики в центре, ЖПС - горит зеленым. Ничего с ним не делал, не ронял, летал регулярно. Что может быть??? Ничего не понимаю. Гейны не трогал - все и так хорошо было.
Но последние пару запусков меня расстроили
А случайно не солнечный день (попадание прямых солнечных лучей на назу)?
У меня все под крышкой. А как солнце влияет???
Решил проблему перепрошивкой и перекалибровкой.