Вопросы по iNav

Вот в этом обзоре аппаратуры человек установил какой-то сенсор, я на бангуде находил много чего, но в использовании ни один не испытывал, не могу подсказать точно. На али их тоже полно, отложил пару в корзинку на будущее.
Скажите, с пульта почему может не армиться? Спутники нашлись 8шт, всё зелёное. Я убрал с тумблера арм (тумблером армится легко), но никак не могу победить именно стиком. А вроде раньше получалось.
И еще по режимам… ANGLE не работает совместно с HORIZON ? они взаимоисключающие? И как быть, когда на одном тумблере, например МАГ, а при включении другого активизируется еще и например ALTHOLD ?
Если блакбокс убрать с полетного режима (с тумблера), то он не будет активироваться или будет активироваться автоматом при старте?
то он не будет активироваться или будет активироваться автоматом при старте?
При арминге будет начинать писать лог.
Какой датчик тока посоветуете для SpRasing F3?
Для какого контроллера - особого значения не имеет. В первую очередь датчик тока должен быть рассчитан на максимальное токопотребление коптера.
У меня подключен PowerModule от APM, который по совместительству еще и датчик напряжения.
Я убрал с тумблера арм (тумблером армится легко), но никак не могу победить именно стиком.
Левый стик вправо при газе в минимум? Смотрите раскладку каналов (верная ли стоит) и сколько расход канала yaw в крайнем правом положении (настройте аппу чтоб каналы управления показывали: 1000 минимум, 1500 среднем положении стика и 2000 максимум.).
Скажите, с пульта почему может не армиться?
Арминг Throttle низ, Yaw вправо. Может минимальное кол-во спутников больше 8?
Если блакбокс убрать с полетного режима (с тумблера)
Должен при арминге начаться запись логов.
По поводу режимов не подскажу
У меня подключен PowerModule от APM
Провода я таки понимаю нужно будет перепаивать? Киньте ссылку пожалуйста, какого типа нужно искать
Провода я таки понимаю нужно будет перепаивать? Киньте ссылку пожалуйста, какого типа нужно искать
На PM используются два типа проводов - силовые и сигнальные. Если вопрос о силовых, то это от сетапа коптера зависит. У меня, например, 12AWG - 680 квадр, хотя по логам более 54А не наблюдал. В качестве сигнальных можно любой провод использовать, хоть из шлейфа IDE от компьютера.
На PM используются два типа проводов - силовые и сигнальные.
С силовыми то понятно. Где у этого модуля выход от датчика тока и куда его подключать? И можно ли его еще и использовать в качестве бека (там же 5.3 В вместо 5 которые нужны)?
Это верная распиновка ?
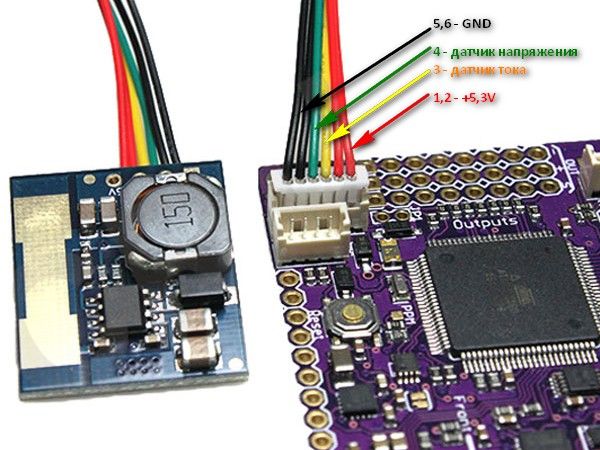
Где у этого модуля выход от датчика тока и куда его подключать?
Это уже лишний вопрос, достаточно погуглить пару картинок и увидеть, что все пины подписаны.
И можно ли его еще и использовать в качестве бека (там же 5.3 В вместо 5 которые нужны)?
Не могу советовать. Мой экземпляр выдает 12 вольт на выходе)
И не факт, что будет 5.3в. Опять же, напряжение указано без нагрузки. Что будет если запитать от него GPS, телеметрию, OSD… Возможно напряжение просядет, а если не просядет, то диод Шоттки в помощь.
Это верная распиновка ?
Не факт, что продавец отправит именно то, что на фото. Или цвета проводов будут теми же. См. ответ на первый вопрос.
достаточно погуглить пару картинок и увидеть, что все пины подписаны
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Левый стик вправо при газе в минимум?
Да так и делал (да куда только я его уже не “того” ) Вроде получалось вчерась…
Каналы нормально, 1000 - 2000, как в аптеке.
Может минимальное кол-во спутников больше 8?
Спутники в кли посмотрел, 6 вроде ограничение (попробую вообще отключить). Да и сигнал контроллер издаёт, что типа “пора лететь” 😃
У меня что 6-ка, что 7-ка теряли часть спутников на скоростях выше 60-70 км/ч
Это я уже на себе испытал с 7. Газанул по прямой ~100 км\ч, все спутники растерялись. Сбросил газ и они вернулись, но сомнения в мыслях уже закрепились.
Разные прошивки - разное поведение. INAV ведет себя по-другому. MOTOR_STOP на то и MOTOR_STOP, что останавливает моторы при нулевом газе.
А вот это интересно. То есть, если включен мотор стоп и Эир мод, то коптер всё таки будет просто падать на убранном газу?
В бэтафлайте я вкючаю мотор стоп (чтобы не крутились при арме) и эирмод совместно с акро режимом(то есть не постоянно).
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает? Коснулся земли - дизармнул тумблером, либо переключил режим на тот где Эирмод не задействован.
С армом проблема решилась. Как всегда “сам д…виноват”. Вчера пытался для симулятора настроить, переключил пульт в модель2, там поменял стики. Думал они только там поменялись, а переключил на коптер сегодня и не глянул на стики. Вот.
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает?
Я извиняюсь, что затронул эту тему. Думаю понимание и выбор режимов придёт с опытом. Это я от безделья и невозможности опробовать столько тут вопросов назадавал… Конечно можно дизармить да и всё (я в общем то так и делал на первом, т.к. четко “как в кино” садиться не научился), мне просто хотелось понять заранее, какой режим для чего и с чем лучше включать. Ведь один тумблер может быть включен в горизон (почему без Т?), второй влючается в альтхолд, а первый то включен… как они совместно ведут себя? Вот такие тонкости мне не понятны.
Есть режимы которые могут работать совместно. Тот же Air mode с Angle, Horizon, Acro (в INav много что может работать совместно с чем-то). А есть режимы взаимоисключающее - Angle и Horizon одновременно включены быть не могут.
горизон (почему без Т?
Потому что на “вражеском”, как вы говорили =)
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Если коптер малого размера, то можно взять PDB со встроенным датчиком тока.
Варианты:
banggood.com/CRIUS-ARPDB-5_3V-3_5A-1MHz-DC-DC-PDB-…
banggood.com/Realacc-HUBOSD-ECO-H-Type-wSTOSD8-Cur…
Газанул по прямой ~100 км\ч, все спутники растерялись
У всех блох максимальная скорость порядка 85-90 км/ч, остальное больше зависит от антенны и шумов, на мелкой пассивной антенне без усилителя и фильтра и 70 км/ч будет проблематично… Так что 8й чипсет тут тоже не помощник…
И, в ЖПС режимах даже назоводы не летают с такими скоростями, для этого есть режимы стабилизации, а ЖПС чтобы висеть или домой возвращаться…
У всех блох максимальная скорость порядка 85-90 км/ч, остальное больше зависит от антенны и шумов, на мелкой пассивной антенне без усилителя и фильтра и 70 км/ч будет проблематично… Так что 8й чипсет тут тоже не помощник…
И, в ЖПС режимах даже назоводы не летают с такими скоростями, для этого есть режимы стабилизации, а ЖПС чтобы висеть или домой возвращаться…
Конечно, тот коптер с INav и его нынешнее перевоплощение не рассчитывалось на постоянное использование на таких скоростях. Это был так сказать “тест на надёжность сборки”.
Буду знать, что это “нормальное” поведение. Спасибо.
Если коптер малого размера, то можно взять PDB со встроенным датчиком тока.
По второй ссылке PDBшка с OSD с минимальной информацией. Там даже полётный режим не отображается. Стоит такая только H версия. То что нужно для гоночного.
Под Inav Лучше брать что-то типа этого
banggood.com/Holybro-5V12V-Output-Power-Distributi…
Правда Константин упоминал, что Minim OSD не любит скачков напряжения. Не знаю как питание OSD на этой PDB реализовано. Может эта проблема учтена.
На Minim OSD я правда такого не заметил, а вот с Micro Minim OSD эта беда меня замучила. В момент сброса газа инфа с экрана пропадала и конденсаторы помогали, но не полностью.
Вот уже месяц внук рулит Inductrix FPV
никаких баро и компасов
в комнате висит как прибитый
называют это - Технология SAFE
говорят, что гоночная команда Blade готовила настройки
софт закрыт
Что они там могли намудрить?
Что они там могли намудрить?
Ничего… Вообще безмозглый Hubsan H107, предок всех этих супермикро, тоже в комнате висит как прибитый… Правильно рассчитанное отношение тяга/плечо - любимая штука всех(любых) контроллеров… Ну и коллекторные моторы более динамичны.
Что они там могли намудрить?
Ничего, правильный дизайн и выверенный ЦТ. Открыть окна чтобы сквозняк и турбулентность появилась - от “прибитости” и следа не останется.
Люди, верно ли я настроил ФС?
Поясню манипуляции:
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
Запустил мотры…упс… оставшийся мотор, типа взлетел, выдернул батарейку с пульта (иначе не выключить) и в конфигураторе увидел включившийся RTH.
Это маленькая творческая победа? 😃
Когда батарею на пульт снова подсоединил и включил, то никакого арминга не потребовалось, но “домой” тут же выключился.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
А что за аппаратура?
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
Не понял, что сделано. Скриншот есть?