Вопросы по iNav

Где у этого модуля выход от датчика тока и куда его подключать?
Это уже лишний вопрос, достаточно погуглить пару картинок и увидеть, что все пины подписаны.
И можно ли его еще и использовать в качестве бека (там же 5.3 В вместо 5 которые нужны)?
Не могу советовать. Мой экземпляр выдает 12 вольт на выходе)
И не факт, что будет 5.3в. Опять же, напряжение указано без нагрузки. Что будет если запитать от него GPS, телеметрию, OSD… Возможно напряжение просядет, а если не просядет, то диод Шоттки в помощь.
Это верная распиновка ?
Не факт, что продавец отправит именно то, что на фото. Или цвета проводов будут теми же. См. ответ на первый вопрос.
достаточно погуглить пару картинок и увидеть, что все пины подписаны
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Левый стик вправо при газе в минимум?
Да так и делал (да куда только я его уже не “того” ) Вроде получалось вчерась…
Каналы нормально, 1000 - 2000, как в аптеке.
Может минимальное кол-во спутников больше 8?
Спутники в кли посмотрел, 6 вроде ограничение (попробую вообще отключить). Да и сигнал контроллер издаёт, что типа “пора лететь” 😃
У меня что 6-ка, что 7-ка теряли часть спутников на скоростях выше 60-70 км/ч
Это я уже на себе испытал с 7. Газанул по прямой ~100 км\ч, все спутники растерялись. Сбросил газ и они вернулись, но сомнения в мыслях уже закрепились.
Разные прошивки - разное поведение. INAV ведет себя по-другому. MOTOR_STOP на то и MOTOR_STOP, что останавливает моторы при нулевом газе.
А вот это интересно. То есть, если включен мотор стоп и Эир мод, то коптер всё таки будет просто падать на убранном газу?
В бэтафлайте я вкючаю мотор стоп (чтобы не крутились при арме) и эирмод совместно с акро режимом(то есть не постоянно).
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает? Коснулся земли - дизармнул тумблером, либо переключил режим на тот где Эирмод не задействован.
С армом проблема решилась. Как всегда “сам д…виноват”. Вчера пытался для симулятора настроить, переключил пульт в модель2, там поменял стики. Думал они только там поменялись, а переключил на коптер сегодня и не глянул на стики. Вот.
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает?
Я извиняюсь, что затронул эту тему. Думаю понимание и выбор режимов придёт с опытом. Это я от безделья и невозможности опробовать столько тут вопросов назадавал… Конечно можно дизармить да и всё (я в общем то так и делал на первом, т.к. четко “как в кино” садиться не научился), мне просто хотелось понять заранее, какой режим для чего и с чем лучше включать. Ведь один тумблер может быть включен в горизон (почему без Т?), второй влючается в альтхолд, а первый то включен… как они совместно ведут себя? Вот такие тонкости мне не понятны.
Есть режимы которые могут работать совместно. Тот же Air mode с Angle, Horizon, Acro (в INav много что может работать совместно с чем-то). А есть режимы взаимоисключающее - Angle и Horizon одновременно включены быть не могут.
горизон (почему без Т?
Потому что на “вражеском”, как вы говорили =)
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Если коптер малого размера, то можно взять PDB со встроенным датчиком тока.
Варианты:
banggood.com/CRIUS-ARPDB-5_3V-3_5A-1MHz-DC-DC-PDB-…
banggood.com/Realacc-HUBOSD-ECO-H-Type-wSTOSD8-Cur…
Газанул по прямой ~100 км\ч, все спутники растерялись
У всех блох максимальная скорость порядка 85-90 км/ч, остальное больше зависит от антенны и шумов, на мелкой пассивной антенне без усилителя и фильтра и 70 км/ч будет проблематично… Так что 8й чипсет тут тоже не помощник…
И, в ЖПС режимах даже назоводы не летают с такими скоростями, для этого есть режимы стабилизации, а ЖПС чтобы висеть или домой возвращаться…
У всех блох максимальная скорость порядка 85-90 км/ч, остальное больше зависит от антенны и шумов, на мелкой пассивной антенне без усилителя и фильтра и 70 км/ч будет проблематично… Так что 8й чипсет тут тоже не помощник…
И, в ЖПС режимах даже назоводы не летают с такими скоростями, для этого есть режимы стабилизации, а ЖПС чтобы висеть или домой возвращаться…
Конечно, тот коптер с INav и его нынешнее перевоплощение не рассчитывалось на постоянное использование на таких скоростях. Это был так сказать “тест на надёжность сборки”.
Буду знать, что это “нормальное” поведение. Спасибо.
Если коптер малого размера, то можно взять PDB со встроенным датчиком тока.
По второй ссылке PDBшка с OSD с минимальной информацией. Там даже полётный режим не отображается. Стоит такая только H версия. То что нужно для гоночного.
Под Inav Лучше брать что-то типа этого
banggood.com/Holybro-5V12V-Output-Power-Distributi…
Правда Константин упоминал, что Minim OSD не любит скачков напряжения. Не знаю как питание OSD на этой PDB реализовано. Может эта проблема учтена.
На Minim OSD я правда такого не заметил, а вот с Micro Minim OSD эта беда меня замучила. В момент сброса газа инфа с экрана пропадала и конденсаторы помогали, но не полностью.
Вот уже месяц внук рулит Inductrix FPV
никаких баро и компасов
в комнате висит как прибитый
называют это - Технология SAFE
говорят, что гоночная команда Blade готовила настройки
софт закрыт
Что они там могли намудрить?
Что они там могли намудрить?
Ничего… Вообще безмозглый Hubsan H107, предок всех этих супермикро, тоже в комнате висит как прибитый… Правильно рассчитанное отношение тяга/плечо - любимая штука всех(любых) контроллеров… Ну и коллекторные моторы более динамичны.
Что они там могли намудрить?
Ничего, правильный дизайн и выверенный ЦТ. Открыть окна чтобы сквозняк и турбулентность появилась - от “прибитости” и следа не останется.
Люди, верно ли я настроил ФС?
Поясню манипуляции:
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
Запустил мотры…упс… оставшийся мотор, типа взлетел, выдернул батарейку с пульта (иначе не выключить) и в конфигураторе увидел включившийся RTH.
Это маленькая творческая победа? 😃
Когда батарею на пульт снова подсоединил и включил, то никакого арминга не потребовалось, но “домой” тут же выключился.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
А что за аппаратура?
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
Не понял, что сделано. Скриншот есть?
Аппаратура …сейчас…найду буквы… Вот - FlySky FS-i6S 10Ch (в новом симпатиШном дизайне)
А скрин вот такой,
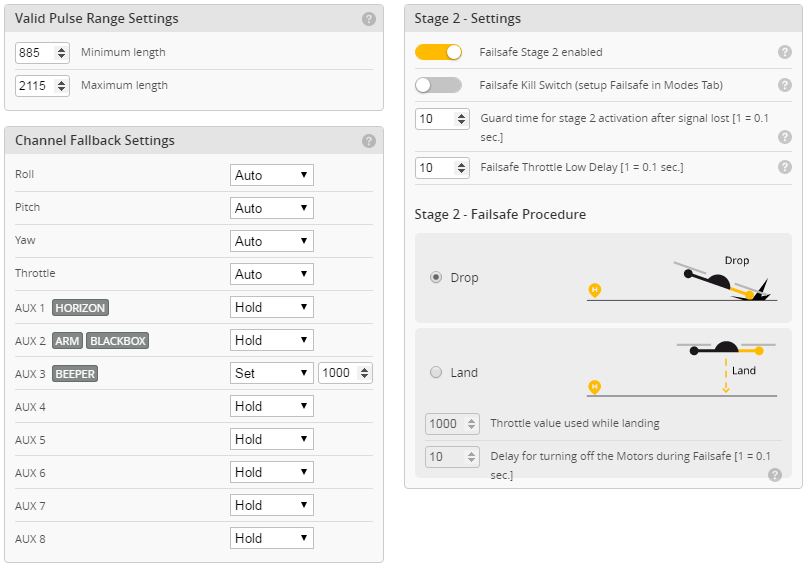
свой не делал:
Здесь слева у меня на аукс4 в режимах установлен “домой”, ну я на него “сет” и назначил. Тоже продублировал и в передатчике. А правая часть отключена (степ2)
А скрин вот такой
А почему у Вас цвета желтые а не синие? Вы случайно не Betaflight конфигуратор используете?
Нет, я же написал, (имел ввиду) что скрин какой попался под руку и ниже дописал, что свой не делал. Настройки то слева точно такие же. Меня смысл сам интересует, а не цвет интерфейса 😃
Меня смысл сам интересует, а не цвет интерфейса
Когда у общества нет цветовой дифференциации интерфейсов, то нет и цели…(©)
Нет, ну на самом деле, когда Вы спрашиваете совета по чему то конкретному, то лучше, таки, делать свои скрины. Очень сложно понять смысл, когда картинка не соответствует тексту…
Как в анекдоте: Пропала собака, похожа на бульдога, только лапы длинные, морда острая и хвост пушистый…)
Блин… я меркантильный, а вы, простите, … тоже не того 😉
Ну какая разница, какого цвета кнопочки? Все данные и закладки точно такие… Думаю всё прекрасно понятно для знающих.
Тем не менее, раз уж так принципиально, вот скрин лично мною только что сделанный. Еще горяченький 😃
:
Сейчас коптер почти весь разобран и не подключен жпс, по этому кнопки с режимом не видно. Ничего, что я вручную дописал (с жпс она там есть)?
Всякие KF, EKF, UKF по сути тот же комплементарник, но с динамической подстройкой коэффициентов. При постоянном и известном шуме от датчиков комлементарник и KF совершенно одинаковы по точности, никакой магии в KF нет, кроме того, что если он глючит, то понять что и куда крутить нереально.
В очень упрощенном виде да, тоже самое, но весь сок там как раз в расчете матрицы динамических корректирущих коэфицинтов и “простой” логикой этого не заменить…
Я в предыдущих релизах пробовал и субьективно даже с успехом. Но да, всего лишь субъективно и без мат. доказательств 😃
// apply Complimentary Filter (CF) with dynamic coef. to keep the calculated velocity based on baro velocity (i.e. near real velocity).
// By using CF it's possible to correct the drift of integrated accZ (velocity) without loosing the phase, i.e without delay
float dynK = 0.020f - min(abs(accZ)/15000.0f, 0.010f);
vel = vel * (1.0f - dynK) + sensorVel * dynK;
// attempts to get "rapid" alt...
// Integrator - altitude, cm
alt += vario * dTime;
// apply CF with dynamic coefficient to keep the calculated altitude near real baro/sonar altitude
dynK = 0.025f - min(abs(vario)/2000.0f, 0.015f);
alt = alt * (1.0f - dynK) + sensorAlt * dynK;
Блин… я меркантильный, а вы
А я педантичный… Вы еще с Шурикусом не сталкивались…)
Думаю всё прекрасно понятно для знающих
А Вы не думайте… Пишите все как для идиотов. Я полчаса втыкал почему у Вас включен дроп вместо ландинга, но при этом Вы пишете, что степ2 отключен… Я то вижу, что он включен…)
А приписку мелким текстом на обратной стороне(Вы случайно в кредитных или страховых организациях не работали?) я не сразу увидел… )