Вопросы по iNav

Отключите ещё удержание высоты, посмотрите на поведение коптера.
В ANGLE та же история.
Стоит приемник XM+, который при слишком близком расположении передатчика дает FS. Это в общем-то известная фича. Но после этого я не могу заармить коптер. Он мне в OSD пишет – выключи ARM. А он выключен. Я щелкаю туда-сюда, опять пишет то же самое. Но потом я заметил закономерность – надо ARM переключить туда-сюда 10 раз или вроде того, и после этого всё восстанавливается. Это что, специально так сделано?
Я исполльзовал XM+. Мне они нравятся. Только не нравится частота 2.4ГГц. Да, приёмник затыкается при перегрузке мощным сигналом. Проблем с армом не помню, но я старался не перегружать приёмник. Делая тесты дома, на передатчик вместо антенны всегда накручиваю 50 Ом эквивалент нагрузки.
Кстати, на маленьком квадрике, когда антенны этого приёмника и видео передатчика на 5.8ГГц находятся рядом, при мощности на 5.8ГГц более 300мВт, приёмник работать будет, но его чувствительность может значительно снижаться. Можно из-за этого ловить ФС уже на небольшом расстоянии. 250мВт 5.8ГГц, с хорошими антеннами, легко хватает на 10км. Большую мощность следует использовать только при необходимости.
Сегодня выбрался проверить квадрик после настройки ПИДов. Поднявшись на полётную высоту проверяю скорость и направление ветра. Он доходит до 31км/час. Угол наклонов квадрика по-прежнему лимитирован 25*. Поэтому, против ветра скорость сильно падает. При полёте в автоматических режимах ещё ограничена и сама скорость до 1200см/сек = 43.2км/час. Обратите внимание, в начале возврата по RTH, похоже, что ветер притихает. Коптер успевает на короткое время разогнаться до лимитированой скорости, упирается в неё и его начинает потряхивать. Затем ветер усиливается и скорсть коптера падает. На всём остальном протяжении полёта по RTH, аппарат из-за ветра не может достигнуть лимита скорости и летит по-этому довольно ровно. Так же, при автоматическом снижении, с ветром аппарат почти не раскачивает. Хотя без ветра обычно сильно трясёт. Во время полёта в стабе происходит небольшая болтанка. Буду искать конденсатор большей ёмкости на аккумулятор. Сейчас стоит 470мФ.
Проблем с армом не помню, но я старался не перегружать приёмник
Это не специфика перегрузки приемника, а просто любой FS. Т.е. можно даже без пропеллеров на столе сделать:
- выключаем передатчик
- коптер переходит в FS и делает допустим LAND, выставляет нужный тротл на моторах
- через 20 секунд моторы останавливаются, процедура FS как бы закончена – кажется, это ключевой момент, чтобы она закончилась.
- включаем передатчик обратно, полетник его видит, но арм не делает, пока не пощелкаешь около 10 раз.
250мВт 5.8ГГц, с хорошими антеннами, легко хватает на 10км. Большую мощность следует использовать только при необходимости.
Я сейчас летаю строго на 25 мВт. Пока не улечу на километр хотя бы, не буду ничего повышать. Меня все еще преследует проклятье плохого сигнала. Последний раз только метров на 300 отлететь смог. Антенны хорошие подобрал по SWR-тестеру, как мог, но в данном случае использовал только припаянную пипку передатчика EWRF и встроенный патчик в TBS Tango. Надеюсь, что с передатчиком, где можно менять антенну, и в очках с подобранными антеннами улечу дальше.
Насчет 10 раз, просто надо подождать секунд 10, 15 и фс сбросится
Почему двигатели 2 и 3 (т.е. по диагонали) могут греться сильнее, чем 1 и 4?
Почему двигатели 2 и 3 (т.е. по диагонали) могут греться сильнее, чем 1 и 4?
в какой ситуации?
по идее, это вращения по яву.
Я сейчас летаю строго на 25 мВт.
Уже несколько лет использую 250мВт на 5.8ГГц. На коптере ставлю лёгкий клевер. Его ножка из мягкого кабеля усилена тремя термоусадочными трубочками, одетыми одна на одну ступеньками с уменьшением диаметра к антенне. Они также формируют загиб кабеля у основания. Разъём не использую, запаиваю кабель напрямую к передатчику, а к раме креплю его стяжкой. Такой жёсткости вполне хватает. Важно, чтобы антенна была высоко над коптером и он, при наклонах и развороте, не затенял её рамой. У меня высота от второго этажа до точки запайки клевера более 100мм.
На очках использую одну всенаправленную маленькую “пагоду” и патч Ф=60мм. С очками или приёмником с дивёрсити нужно разбираться. Вроде бы там два равнозначных антенных входа, но на самом деле, один из них имеет приоритет. Этого нет в описании. Я использую очки Skyzone и приёмник Aomway. В моих очках приоритетный антенный вход расположен над левым глазом, а в приёмнике - справа, если смотреть спереди на разъёмы. Я в них подключаю патчи и контролирую направление на коптер. В другие входы подсоединяю всенаправленные антенны. Когда коптер, выпадает из направления патча, приёмник автоматически переключается на всенаправленную антенну и связь не теряется. Это проверено мной эксперементально не один раз и работает удобнее, чем если поменять антенны местами. Если нужна более дальняя связь, ставлю на треножник патч Ф=150мм с ретранслятором в котором используется приёмник Aomway. Это удобно тем, что 150мм лапух не нужно держать на очках и шеей ловить направление. Наоборот, можно свободно крутить головой и ловить комаров. 😃 При этом связь будет поддерживаться устойчиво. Важно не забывать в это время про направление антенны на аппаратуре, которая в руках.
Прошу прощения за уход от основной темы.
в какой ситуации?
по идее, это вращения по яву.
Совершенно верно. Сегодня ещё заметил: при резвом подъёме коптер слегка поворачивается по яву. В начале было недоумение: всего лишь решил сделать раму более компактной, уменьшив длину лучей, нарезал новые из свежекупленной трубы. Всё оказалось очень просто: квадратная алюминиевая труба, купленная в Леруа, из которой были сделаны лучи, оказалась слегка кручёная. 😦. Во как!
Почему двигатели 2 и 3 (т.е. по диагонали) могут греться сильнее, чем 1 и 4?
Наиболее частая причина - плохие пиды по оси YAW.
Например, избыток P может приводить к постоянным перекомпенсациям, которые разогревают моторы.
избыток P может приводить к постоянным перекомпенсациям
В одну сторону? Что то вы не то написали.
Почему двигатели 2 и 3 (т.е. по диагонали) могут греться сильнее
С соосностью двигаделей всё в порядке?
В одну сторону? Что то вы не то написали.
С соосностью двигаделей всё в порядке?
Как выяснил, не всё. В #13645 я уже написал, что выяснил, что из-за кривых труб на лучах, движки отклонились от вертикальной оси ~ 0,5 градуса. Перед покупкой квадратной алюминиевой трубы обязательно нужно проверять её на предмет ровности. Взял две трубы по метру- оказались обе винтом, на свалку, видно, вся партия дерьмовая.
В одну сторону? Что то вы не то написали.
В какую сторону? Речь шла про нагрев моторов одной из диагоналей, это очевидный признак избытка P или D по YAW, ибо именно диагональ из двух моторов участвует в стабилизации ява.
именно диагональ из двух моторов участвует в стабилизации ява
А другая диагональ из двух моторов в стабилизации по yaw не участвует?
Поставил на 5" квадрик параллельно аккумуляторам 4S1P 18650 конденсатор 2200мФ вместо 470мФ. Немного полетал. Погода попрежнему ветренная. Мне кжется, при прямолинейном полёте, раскачка стала немного меньше.
Летал, висел, было всё прекрасно. И вот вчера прямо в полете вот такая фигня случилась.
Че-то оно и меня настигло, похоже. Правда, коптер мелкий, 2 дюйма, на пластиковой раме. Вчера нормально летал. Сегодня запустил опять. Летает нормально, но странный звук моторов и вроде как мелко трясется. Потом чувствую запах – моторы кипят! Пробовал пиды отстроить, не вариант. Запускается на арме ок, а только тягу поднимаешь – сразу трясет. Проверил крепления моторов и полетника, все в норме. Моторы/пропы новые, хорошие, не вибрируют. Что случилось, не пойму.
Есть растущее подозрение на полетник Diatone Mamba F405 Mini. Он уже на второй раме летает, и каждый раз какие-то странности происходят, похоже с гироскопом связанные.
Проверил крепления моторов и полетника, все в норме.
Похоже, нет. Решил уже снимать полетник, все открутил, а одна нейлоновая стойка под ним оказалась недозакрученной. А недозакрученная, потому что резьбу сорвало. Фиг знает, он бы даже и на двух стойках жестко держался, но я ради чистоты эксперимента заменю стойку и еще раз попробую.
А недозакрученная, потому что резьбу сорвало. Фиг знает, он бы даже и на двух стойках жестко держался, но я ради чистоты эксперимента заменю стойку и еще раз попробую.
У меня на 5" коптере стойки крепления плат сделаны 20х20, я поменял полётник и поставил новый с отверстиями 30х30. Пришлось сделать в виде “8” четыре переходничка. Со временем пластиковые винты ослабли и этажерка с переходниками начала прилично люфтить. Ток не возрос, двигатели не грелись. Только в прямолинейном полёте коптер заметно покачивало. Затянул винты и качания убрались.
Кирил, скажите, сколько сейчас у вас получается взять по ёмкости от аккумулятора за максимальный по времени полёт и сколько он потом берёт при заряде? Какое максимальное время полёта?
Сегодня полетал немного.
Поле не большое. Плавный подьем до 30 метров и удаление на 200-250 метров, разворот, возврат со снижением до 10 м. Чуть повисел и по новой…
Отлетал две батки. 4s18650 vtc6. Время на обоих получилось по 15 с половиной минут. Сажал на 2,9V.
Первый пак слито 2167мач\ залил 2253
Второй слил 2242\ залил 2327
Пересчитал, получилось 57.7 вместо 60 (старое значение датчика тока).
Сегодня ветренно было, потряхивало знатно. По сравнению с прошлым полетом убавил углы с 40 до 30. Рейты вместо 500 поставил 300-300-250. И пиды до 30 по питчу и ролу занизил (было по 50).
Теперь другая беда настигла. Купил второй приемник в скайзоны 04х, обновил, и пошли срывы синхры на 100 метрах…
Вот тут написал проблему: rcopen.com/forum/f90/topic560082/299
Подскажите плиз. Почему в альтхолде коптер дрейфует назад? при том, что в angle этого не происходит ну и, ясно дело в постхолде тоже. Изначально в angle тоже уплывал. Я оттримировал стиками вперед, но вот альтхолд все равно плывет назад.
ради чистоты эксперимента заменю стойку и еще раз попробую.
Заменил стойку, потом моторы и полетник, в целом непонятно ничего. Как только все соберешь – четко летает. Одну батарейку отлетает, ставлю вторую - начинается опять тряска моторов.
Встретил две проблемы.
- При подключении батареи 4S к полетнику HGLRC Forward Mini перестал работать 5-вольтовый VTX (видимо, сгорел). Видимо, это такая же беда, какая была с Omnibus F4 V3 Pro, который на 4S жег 5-вольтовую электронику. Другой передатчик поставил, тоже на 5 вольт. Если сгорит, значит все плохо.
- Вот этот регулятор:
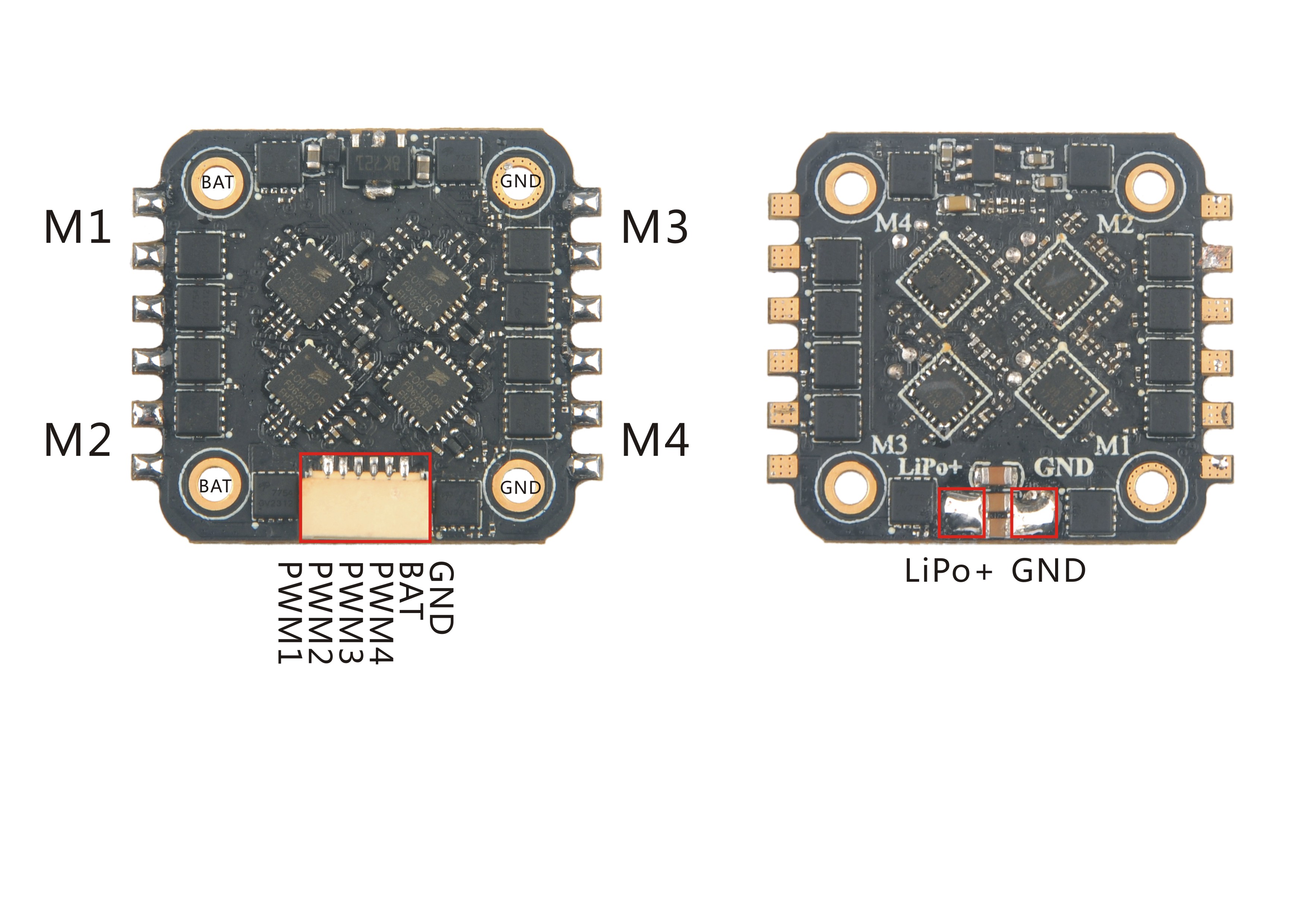
Здесь на картинке указаны неправильные пины для разъёма. GND и BAT находятся с другой стороны (т.е. право-лево перепутаны местами). Я подключил как на картинке и пустил BAT на один из моторных выходов, но к счастью ничего не сгорело, просто не работало. Потом уже прозвонил и понял, в чем дело.
Буду теперь раму менять, есть подозрение что она слишком мягкая.
Чем может быть вызван этот пик шумов на 25Гц?
И что за ерунда, знает кто, когда P и D работают в одну сторону? Должны же в противофазу.
У меня на 4" LR получаются пиды P-14 I-19 D-16, примерно. Насколько вообще такие цифры имеют право на жизнь?