Вопросы по iNav

Проверил крепления моторов и полетника, все в норме.
Похоже, нет. Решил уже снимать полетник, все открутил, а одна нейлоновая стойка под ним оказалась недозакрученной. А недозакрученная, потому что резьбу сорвало. Фиг знает, он бы даже и на двух стойках жестко держался, но я ради чистоты эксперимента заменю стойку и еще раз попробую.
А недозакрученная, потому что резьбу сорвало. Фиг знает, он бы даже и на двух стойках жестко держался, но я ради чистоты эксперимента заменю стойку и еще раз попробую.
У меня на 5" коптере стойки крепления плат сделаны 20х20, я поменял полётник и поставил новый с отверстиями 30х30. Пришлось сделать в виде “8” четыре переходничка. Со временем пластиковые винты ослабли и этажерка с переходниками начала прилично люфтить. Ток не возрос, двигатели не грелись. Только в прямолинейном полёте коптер заметно покачивало. Затянул винты и качания убрались.
Кирил, скажите, сколько сейчас у вас получается взять по ёмкости от аккумулятора за максимальный по времени полёт и сколько он потом берёт при заряде? Какое максимальное время полёта?
Сегодня полетал немного.
Поле не большое. Плавный подьем до 30 метров и удаление на 200-250 метров, разворот, возврат со снижением до 10 м. Чуть повисел и по новой…
Отлетал две батки. 4s18650 vtc6. Время на обоих получилось по 15 с половиной минут. Сажал на 2,9V.
Первый пак слито 2167мач\ залил 2253
Второй слил 2242\ залил 2327
Пересчитал, получилось 57.7 вместо 60 (старое значение датчика тока).
Сегодня ветренно было, потряхивало знатно. По сравнению с прошлым полетом убавил углы с 40 до 30. Рейты вместо 500 поставил 300-300-250. И пиды до 30 по питчу и ролу занизил (было по 50).
Теперь другая беда настигла. Купил второй приемник в скайзоны 04х, обновил, и пошли срывы синхры на 100 метрах…
Вот тут написал проблему: rcopen.com/forum/f90/topic560082/299
Подскажите плиз. Почему в альтхолде коптер дрейфует назад? при том, что в angle этого не происходит ну и, ясно дело в постхолде тоже. Изначально в angle тоже уплывал. Я оттримировал стиками вперед, но вот альтхолд все равно плывет назад.
ради чистоты эксперимента заменю стойку и еще раз попробую.
Заменил стойку, потом моторы и полетник, в целом непонятно ничего. Как только все соберешь – четко летает. Одну батарейку отлетает, ставлю вторую - начинается опять тряска моторов.
Встретил две проблемы.
- При подключении батареи 4S к полетнику HGLRC Forward Mini перестал работать 5-вольтовый VTX (видимо, сгорел). Видимо, это такая же беда, какая была с Omnibus F4 V3 Pro, который на 4S жег 5-вольтовую электронику. Другой передатчик поставил, тоже на 5 вольт. Если сгорит, значит все плохо.
- Вот этот регулятор:
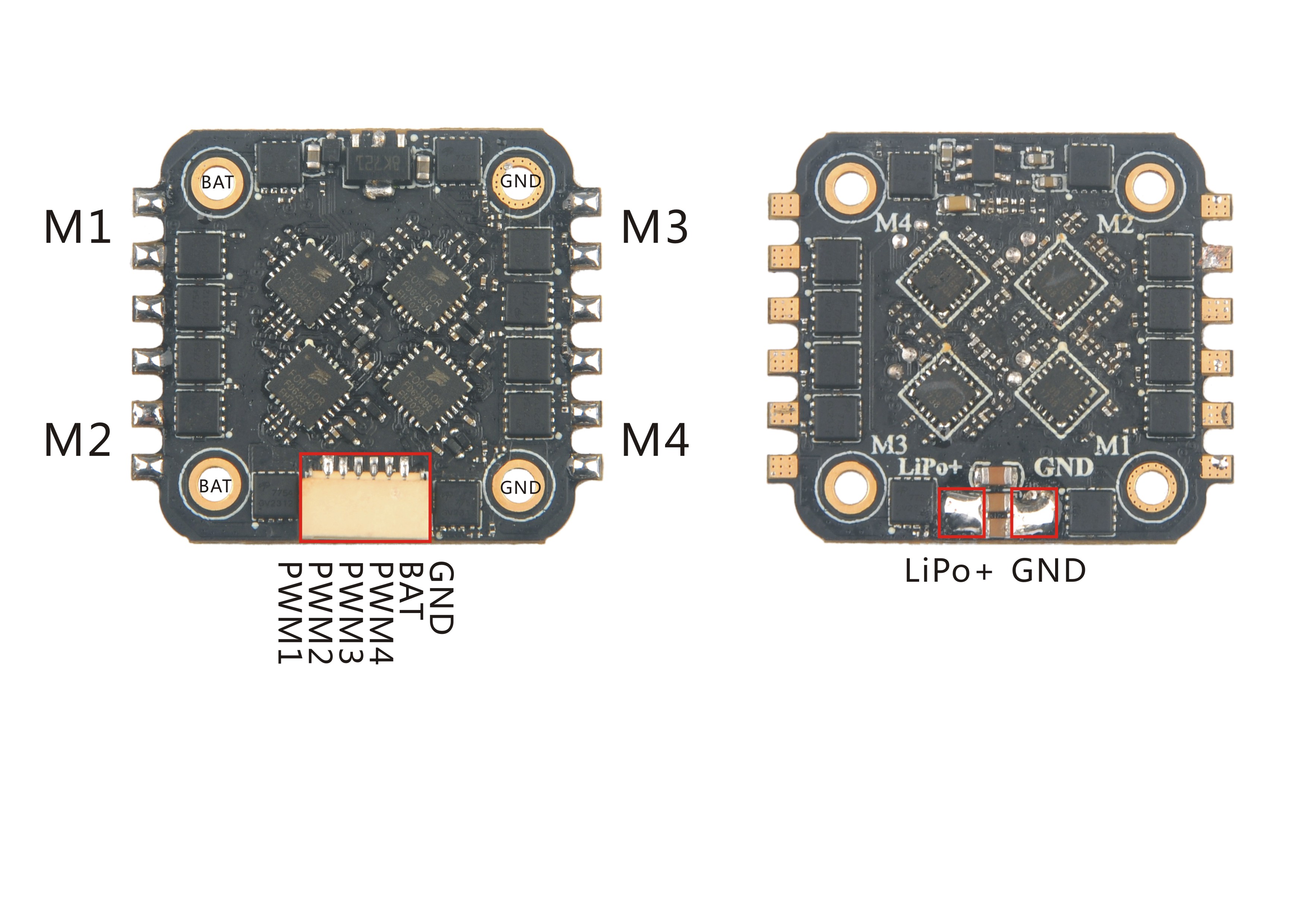
Здесь на картинке указаны неправильные пины для разъёма. GND и BAT находятся с другой стороны (т.е. право-лево перепутаны местами). Я подключил как на картинке и пустил BAT на один из моторных выходов, но к счастью ничего не сгорело, просто не работало. Потом уже прозвонил и понял, в чем дело.
Буду теперь раму менять, есть подозрение что она слишком мягкая.
Чем может быть вызван этот пик шумов на 25Гц?
И что за ерунда, знает кто, когда P и D работают в одну сторону? Должны же в противофазу.
У меня на 4" LR получаются пиды P-14 I-19 D-16, примерно. Насколько вообще такие цифры имеют право на жизнь?
У меня на 4" LR получаются пиды P-14 I-19 D-16, примерно. Насколько вообще такие цифры имеют право на жизнь?
вполне, только у меня обычно I сильно ниже и D тоже чуть ниже, т.е. для вашего примера было бы 14-5-10, типа того. Влияния I в принципе не заметил.
вполне, только у меня обычно I сильно ниже и D тоже чуть ниже, т.е. для вашего примера было бы 14-5-10, типа того. Влияния I в принципе не заметил.
О, ого, спасибо! Я в процессе, думаю, D правда пониже надо. Смутило, что в туториалах от 20-30 пиды начинались. Попробую снизить I и D, а то пока подобрать пытаюсь.
Смутило, что в туториалах от 20-30 пиды начинались
На маленьких рамах (у меня 2-3 дюйма) это прямо сильно много, я не мог летать, пока не сделал около 10. Но с другой стороны, играет роль не одно число, а общая их комбинация, может там что-то взаимно компенсируется. Я просто по старинке делаю, сначала все в ноль, летаю - коптер конечно как пьяный, затем постепенно поднимаю P и слежу. Когда P не хватает, коптер по кругу заваливается на каждый луч, будто плавает. Когда много, начинаются осцилляции. D потом ставлю где-то 50% от P и в общем-то всё. Дальше уже слежу что происходит при резких маневрах и т.п., и корректирую по мере необходимости.
Буду теперь раму менять, есть подозрение что она слишком мягкая.
Поменял раму, не помогло. Но нашел причину.
Оказывается, дело было в PID по яву. Я пиды менял только по роллу и питчу, а по яву стояло слишком большое P и из-за этого коптер колбасило. Снизил яв и все наконец-то стало работать как надо.
“дело было в PID по яву”
Тему не читаем?rcopen.com/forum/f123/topic443443/10521
Я просто по старинке делаю, сначала все в ноль, летаю - коптер конечно как пьяный, затем постепенно поднимаю P и слежу. Когда P не хватает, коптер по кругу заваливается на каждый луч, будто плавает.
о, попробую сейчас так, спасибо! А то уже и Бардвелла пересмотрел, и Павла, немного каша в голове
Вольтаж батареи стал резко падать с 3.5 до 2 вольта, затем я увидел что коптер кувыркаясь падает вниз, под ним была река, и я с ним уже попрощался
Вроде как удалось воспроизвести ситуацию, только с нормальными лионками, так что напряжение не проваливалось.
Опять запустил коптер с лионками 3S1P, но сразу был унитазинг.
Откалибровал компас, унитазинг пропал.
Проверил во всех направлениях - позицию держит, разгоны-торможения отрабатывает нормально, домой идёт.
Полетел вдаль на скорости 30-40 км/ч. Так как глазомер по FPV-камере у меня все еще плохой, то показалось, что лечу вроде как в крону дерева, и тогда, отпустив стик вперед, я стал подниматься вверх.
Т.е. при отпускании стика вперед коптер должен отскочить назад, и при этом еще есть дополнительная тяга вверх.
Всё это привело к тому, что опять начался жесточайший унитазинг. Видеосвязь опять потерял.
Включил RTH и отправился домой, все было ок. Домой летел прямо, ровно, на приземление отлично пошел и т.д.
В общем, надо мне как-то решить, что делать с моментом, когда коптер одновременно тормозит и набирает высоту. Возможно, набор высоты даже ни при чем, а просто торможение на высокой скорости (в тестах я помедленнее пробовал).
что делать с моментом, когда коптер одновременно тормозит и набирает высоту.
Я бы попробовал поменять винты на другие - похоже на резонансные вибрации…
Всё это привело к тому, что опять начался жесточайший унитазинг.
Андрей, какие у тебя стоят навигационные ПИДы? Напиши цифры POS и POSR из OSD.
Т.е. при отпускании стика вперед коптер должен отскочить назад
То есть вы летаете в “holde-cruse”? В этом режиме летать на скорости и резко бросать стики противопоказано. Летайте в “althold”. И мое субъективное мнение, что hold режим вообще не для этого класса дронов. Этот режим для съемок с дронов оснащенных двух-трех осевым подвесом, и по fpv не видно этих метаний, т.к. камера всегда держит горизонт. Для дронов без подвеса этот режим нужен типа “нос почесать, а руки заняты”.
Андрей, какие у тебя стоят навигационные ПИДы? Напиши цифры POS и POSR из OSD.
из конфигуратора (2.6.1):
PositionXY 65
VelocityXY 40-15-100-40
Surface 0-0-0
User control mode: Attitude
Max nav speed: 300
Max cruise speed: 500
Max nav climb rate: 500
Max althold climb rate: 200
Multirotor max banking rate (degrees): 30
Ну в общем я там ничего не трогал, все по умолчанию стоит после прошивки.
То есть вы летаете в “holde-cruse”? В этом режиме летать на скорости и резко бросать стики противопоказано. Летайте в “althold”.
Вы знаете, я только сейчас понял, что в холде летать действительно совсем необязательно. В холде надо просто висеть. А лететь куда-то холд не нужен. До меня это почему-то не доходило и я всегда держал холд включенным.
То есть проблемы, получается, особой и нет.
Но все же хочу разобраться, что происходит, и успокоиться.
То есть проблемы, получается, особой и нет.
Но все же хочу разобраться, что происходит, и успокоиться.
Просто нужно понять действия дрона в этом режиме. Вот представте: вы едете на машине и вдруг резко давите на тормоза, что происходит с вами в этот момент. Первое вас кидает на руль, а затем откидывает назад. Сравнение может неудачное но похоже. Или на дроне в режиме hold вы выбрали направление и задаете стиком ему скорость, при этом есть боковой ветер (любой силы), дрон будет стараться держать выбранное вами направление, и при этом будет наклон в сторону ветра. Что вы увидите при этом на экране OSD? А то пишут, вот мол горизонт не держит, а он и не должен в этом режиме держать горизонт. Его задача держать либо точку, либо выбранное направление.
PS Взлет дрона обычно делается в режиме angel, на высоте 10-20 метров можно перейти а althold, а в режим hold по желанию.
Взлет дрона обычно делается в режиме angel, на высоте 10-20 метров можно перейти а althold, а в режим hold по желанию.
Я так и делаю. Взлетаю всегда в англе, потом проверяю альтхолд, потом посхолд. Но вот дальше лечу в посхолде, а ведь это не принципиально.
Просто нужно понять действия дрона в этом режиме.
Ну скажем фантомы в том же посхолде летают вполне себе адекватно. Бросил стик - он останавливается без какой-либо дикой раскачки.
Да и мой коптерок летает норм, при небольшой скорости, надо просто еще потестировать в других условиях.
Ну скажем фантомы в том же посхолде летают вполне себе адекватно.
Чем не Фантом? Matek F405-CTR.
PS Это учитывая, что съемка велась при сильном ветре (до и после дождя)
Чем не Фантом? Matek F405-CTR.
Хорошие съёмки, но как раз отсутствуют такие моменты, где коптер быстро летит и резко останавливается. Все происходит медленно и плавно. А с этим проблем нет.