Вопросы по iNav

Может кому интересно, нашел SP Racing F3 EVO за $11.99 с компасом и барометром… ru.aliexpress.com/item/…/32701894008.html (не реклама).
Добрый день Коллеги. мой пост 2428
Есть такой полетный контроллер:
AfroFlight32 / Naze 32
36x36mm CopterControl-sized 9DOF flyingthing
STM32F103C8T6 32-bit ARM Cortex M3, 72MHz, 64K flash, 20K SRAM
ADXL345 Accel
MPU3050 Gyro
BMP085 Pressure sensor
HMC5883L Mag
CP2102 USB>Serial bridge
6 + 8 PWM I/O
2 status LEDs
5V Buzzer connector
Battery voltage monitoring
Прошивку залил такую inav_1.4.0_NAZE.hex
GPS стал активным, компас так и не активный.
Как выложить файл лога ?
рама 330 ,двигатели 980kv, винты 8 дюймов коптер сильно колбасит 😦
# dump
# version
# INAV/NAZE 1.4.0 Nov 28 2016 / 10:55:47 (6bf7a91)
# pflags
# Persistent config flags: 0x00000000
# dump master
# mixer
mixer QUADX
mmix reset
smix reset
# feature
feature -RX_PPM
feature -VBAT
feature -UNUSED_1
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -CURRENT_METER
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DASHBOARD
feature -UNUSED_2
feature -BLACKBOX
feature -CHANNEL_FORWARDING
feature -TRANSPONDER
feature -AIRMODE
feature -SUPEREXPO
feature -VTX
feature -RX_SPI
feature -SOFTSPI
feature -PWM_SERVO_DRIVER
feature -PWM_OUTPUT_ENABLE
feature VBAT
feature GPS
feature FAILSAFE
feature RX_PARALLEL_PWM
feature PWM_OUTPUT_ENABLE
# beeper
beeper GYRO_CALIBRATED
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACC_CALIBRATION
beeper ACC_CALIBRATION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
beeper LAUNCH_MODE
# map
map AETR1234
# serial
serial 0 1 115200 38400 0 115200
serial 1 2 115200 57600 0 115200
set looptime = 2000
set i2c_overclock = OFF
set gyro_sync = OFF
set gyro_sync_denom = 2
set acc_task_frequency = 500
set attitude_task_frequency = 250
set async_mode = NONE
set mid_rc = 1500
set min_check = 1100
set max_check = 1900
set rssi_channel = 0
set rssi_scale = 30
set rssi_ppm_invert = OFF
set rc_smoothing = ON
set input_filtering_mode = OFF
set min_throttle = 1150
set max_throttle = 1850
set min_command = 1000
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 1000
set motor_pwm_rate = 400
set motor_pwm_protocol = STANDARD
set fixed_wing_auto_arm = OFF
set disarm_kill_switch = ON
set auto_disarm_delay = 5
set small_angle = 25
set reboot_character = 82
set gps_provider = UBLOX
set gps_sbas_mode = AUTO
set gps_dyn_model = AIR_1G
set gps_auto_config = ON
set gps_auto_baud = ON
set inav_accz_unarmedcal = ON
set inav_use_gps_velned = ON
set inav_gps_delay = 200
set inav_gps_min_sats = 6
set inav_w_z_baro_p = 0.350
set inav_w_z_gps_p = 0.200
set inav_w_z_gps_v = 0.500
set inav_w_xy_gps_p = 1.000
set inav_w_xy_gps_v = 2.000
set inav_w_z_res_v = 0.500
set inav_w_xy_res_v = 0.500
set inav_w_acc_bias = 0.010
set inav_max_eph_epv = 1000.000
set inav_baro_epv = 100.000
set nav_disarm_on_landing = OFF
set nav_use_midthr_for_althold = OFF
set nav_extra_arming_safety = ON
set nav_user_control_mode = ATTI
set nav_position_timeout = 5
set nav_wp_radius = 100
set nav_max_speed = 300
set nav_max_climb_rate = 500
set nav_manual_speed = 500
set nav_manual_climb_rate = 200
set nav_landing_speed = 200
set nav_land_slowdown_minalt = 500
set nav_land_slowdown_maxalt = 2000
set nav_emerg_landing_speed = 500
set nav_min_rth_distance = 500
set nav_rth_tail_first = OFF
set nav_rth_alt_mode = AT_LEAST
set nav_rth_altitude = 1000
set nav_mc_bank_angle = 30
set nav_mc_hover_thr = 1500
set nav_mc_auto_disarm_delay = 2000
set nav_fw_cruise_thr = 1400
set nav_fw_min_thr = 1200
set nav_fw_max_thr = 1700
set nav_fw_bank_angle = 20
set nav_fw_climb_angle = 20
set nav_fw_dive_angle = 15
set nav_fw_pitch2thr = 10
set nav_fw_roll2pitch = 75
set nav_fw_loiter_radius = 5000
set nav_fw_launch_accel = 1863
set nav_fw_launch_detect_time = 40
set nav_fw_launch_thr = 1700
set nav_fw_launch_motor_delay = 500
set naw_fw_launch_timeout = 5000
set naw_fw_launch_climb_angle = 10
set serialrx_provider = SPEK1024
set spektrum_sat_bind = 0
set telemetry_switch = OFF
set telemetry_inversion = OFF
set frsky_default_lattitude = 0.000
set frsky_default_longitude = 0.000
set frsky_coordinates_format = 0
set frsky_unit = IMPERIAL
set frsky_vfas_precision = 0
set frsky_vfas_cell_voltage = OFF
set hott_alarm_sound_interval = 5
set battery_capacity = 0
set vbat_scale = 110
set vbat_max_cell_voltage = 43
set vbat_min_cell_voltage = 33
set vbat_warning_cell_voltage = 35
set current_meter_scale = 400
set current_meter_offset = 0
set multiwii_current_meter_output = OFF
set current_meter_type = ADC
set align_gyro = DEFAULT
set align_acc = DEFAULT
set align_mag = DEFAULT
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 0
set gyro_lpf = 42HZ
set moron_threshold = 32
set imu_dcm_kp = 2500
set imu_dcm_ki = 50
set imu_dcm_kp_mag = 10000
set imu_dcm_ki_mag = 0
set pos_hold_deadband = 20
set alt_hold_deadband = 50
set yaw_motor_direction = 1
set yaw_jump_prevention_limit = 200
set tri_unarmed_servo = ON
set servo_lowpass_freq = 400
set servo_lowpass_enable = OFF
set servo_center_pulse = 1500
set servo_pwm_rate = 50
set failsafe_delay = 10
set failsafe_off_delay = 200
set failsafe_throttle = 1000
set failsafe_kill_switch = OFF
set failsafe_throttle_low_delay = 100
set failsafe_procedure = SET-THR
set rx_min_usec = 885
set rx_max_usec = 2115
set acc_hardware = 0
set baro_use_median_filter = ON
set baro_hardware = 0
set mag_hardware = 0
set blackbox_rate_num = 1
set blackbox_rate_denom = 1
set blackbox_device = SERIAL
set magzero_x = 0
set magzero_y = 0
set magzero_z = 0
set acczero_x = 42
set acczero_y = -32
set acczero_z = -60
set accgain_x = 4096
set accgain_y = 4114
set accgain_z = 4045
# rxfail
rxfail 0 a
rxfail 1 a
rxfail 2 a
rxfail 3 a
rxfail 4 h
rxfail 5 h
rxfail 6 h
rxfail 7 h
rxfail 8 h
rxfail 9 h
rxfail 10 h
rxfail 11 h
rxfail 12 h
rxfail 13 h
rxfail 14 h
rxfail 15 h
rxfail 16 h
rxfail 17 h
# dump profile
# profile
profile 0
# aux
aux 0 1 0 1600 1750
aux 1 0 0 900 900
aux 2 0 0 900 900
aux 3 0 0 900 900
aux 4 0 0 900 900
aux 5 0 0 900 900
aux 6 0 0 900 900
aux 7 0 0 900 900
aux 8 0 0 900 900
aux 9 0 0 900 900
aux 10 0 0 900 900
aux 11 0 0 900 900
aux 12 0 0 900 900
aux 13 0 0 900 900
aux 14 0 0 900 900
aux 15 0 0 900 900
aux 16 0 0 900 900
aux 17 0 0 900 900
aux 18 0 0 900 900
aux 19 0 0 900 900
# adjrange
adjrange 0 0 0 900 900 0 0
adjrange 1 0 0 900 900 0 0
adjrange 2 0 0 900 900 0 0
adjrange 3 0 0 900 900 0 0
adjrange 4 0 0 900 900 0 0
adjrange 5 0 0 900 900 0 0
adjrange 6 0 0 900 900 0 0
adjrange 7 0 0 900 900 0 0
adjrange 8 0 0 900 900 0 0
adjrange 9 0 0 900 900 0 0
adjrange 10 0 0 900 900 0 0
adjrange 11 0 0 900 900 0 0
# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000
# servo
servo 0 1000 2000 1500 90 90 100 -1
servo 1 1000 2000 1500 90 90 100 -1
servo 2 1000 2000 1500 90 90 100 -1
servo 3 1000 2000 1500 90 90 100 -1
servo 4 1000 2000 1500 90 90 100 -1
servo 5 1000 2000 1500 90 90 100 -1
servo 6 1000 2000 1500 90 90 100 -1
servo 7 1000 2000 1500 90 90 100 -1
set nav_alt_p = 50
set nav_alt_i = 0
set nav_alt_d = 0
set nav_vel_p = 100
set nav_vel_i = 50
set nav_vel_d = 10
set nav_pos_p = 65
set nav_pos_i = 120
set nav_pos_d = 10
set nav_posr_p = 180
set nav_posr_i = 15
set nav_posr_d = 100
set nav_navr_p = 10
set nav_navr_i = 5
set nav_navr_d = 8
set deadband = 5
set yaw_deadband = 5
set throttle_tilt_comp_str = 0
set flaperon_throw_offset = 250
set flaperon_throw_inverted = OFF
set gimbal_mode = NORMAL
set fw_iterm_throw_limit = 165
set mode_range_logic_operator = OR
set default_rate_profile = 0
set mag_declination = 0
set mag_hold_rate_limit = 90
set p_pitch = 40
set i_pitch = 30
set d_pitch = 23
set p_roll = 40
set i_roll = 30
set d_roll = 23
set p_yaw = 85
set i_yaw = 45
set d_yaw = 0
set p_level = 20
set i_level = 15
set d_level = 75
set max_angle_inclination_rll = 300
set max_angle_inclination_pit = 300
set gyro_soft_lpf_hz = 60
set acc_soft_lpf_hz = 15
set dterm_lpf_hz = 40
set yaw_lpf_hz = 30
set yaw_p_limit = 300
set iterm_ignore_threshold = 200
set yaw_iterm_ignore_threshold = 50
set rate_accel_limit_roll_pitch = 0
set rate_accel_limit_yaw = 10000
# dump rates
# rateprofile
rateprofile 0
set rc_expo = 70
set rc_yaw_expo = 20
set thr_mid = 50
set thr_expo = 0
set roll_rate = 20
set pitch_rate = 20
set yaw_rate = 20
set tpa_rate = 0
set tpa_breakpoint = 1500
нашел SP Racing F3 EVO за $11.99 с компасом и барометром… ru.aliexpress.com/item/…/32701894008.html
В теме была уже ссыль, брал оттуда 2 штуки - оба из коробки не совсем работоспособны. Нужно было менять диодную сборку (не было питания от колодки выходов - 5v на стм и приемник, от usb все питалось и работало отлично - сразу не заметишь) - цена вопроса - 3 минуты пайки и 4 рубля за диод в самом дорогом российском магазине (сборка диодов шотки - BAT54C - на плате он как H2D) и работает на 100%.
х.з. Просто на инофоруме/гетхабе есть упоминание, типа поставил диод и всё отлично (но почему поставил я не понял), вот я и предположил
А вникнуть? Там диод используется потому, что подключение по 3м проводам (tx и rx по одному проводу)в разъем sport скорее всего фрискин.
Там диод используется потому, что подключение по 3м проводам
Тогда х.з. от чего у меня так происходит. Попробую в софтсериал 2 подключить.
Нужно было менять диодную сборку
Похоже это через один так, я и ранее писал, что уже не на одном ПК (а на крайнем уже дважды) менял эту гадость…“Родная” вылетает почти сразу.
Здравствуйте.Может кто сможет подсказать в чем отличие прошивок CC3D и CC3DPPM1?
Нужно было менять диодную сборку
Добрый день!
Если у кого есть схема любой версии sp racing f3 - скиньте ссылку пожалуйста.
Отпишусь, может кто тоже будет подключать к софтсериал и возникнет проблема: Поменял 1-й на второй порт (softserial) и уровень батареи стал показываться нормально и правильно.
Здравствуйте.Может кто сможет подсказать в чем отличие прошивок CC3D и CC3DPPM1?
В том что вход PPM на FlexiI/O в каждой из этих прошивок разный. CC3DPPM1 в этой на первом (вернее на 3м, после питания и земли который), в обычном помоему на 8м.
Поменял 1-й на второй порт (softserial) и уровень батареи стал показываться нормально и правильно.
О как. Я первом не пробовал, сразу на второй подключал (удобнее мне так было провода проложить). Может поэтому и не заметил проблем. Но заметил ещё одну особенность (может это правда особенность моих компонентов) - на стабилизаторе питающем мозг, телеметрию, сервы, светодиодную ленту, приемник - ну в принципе почти все 5 вольтовые потребители, я установил напряжение 5.18 вольт, так вот при таком напряжении светодиодная лента (10 светодиодов ws2812b) работает совсем не стабильно (то запускается, но чаще работает неправильно, и не стабильно, то не запускается). С трудом нашел причину (думал может что подпалил, тем более как раз монтировал осд и модуль НС-12) - не выше 5.11 вольт уже работает отлично.
GPS стал активным, компас так и не активный.
Модуль gps какой ? с компасом ? Если да, то компас подключали в I2C? Или внутренний без подключения внешнего неработает? На этом мозге нужно выпаивать внутренний компас (который на плате контроллера) для того что б использовать внешний (на модуле gps или отдельной выносной платкой). Без выпаивания не будет работать в большинстве случаев (за исключением использования некоторой , так сказать, экзотики).
так вот при таком напряжении светодиодная лента (10 светодиодов ws2812b) работает совсем не стабильно
У меня на 5.1В выставлено, Но на ледстрипе (8 светодиодов) один светодиод почему-то на улице начинает перемигивать и то еле светит то тухнет, а дома идеально (может непропай?). Ленты я 12В поставил, к ним претензий пока нет.
Ленты я 12В поставил, к ним претензий пока нет.
Ну к ним и не будет, они в большинстве и до 14,5 вольт работают.
Как прошить quanton?
а кто может рассказать что нового в 1.6 для лк.
есть ли там чтото,на тот случай если пропадут спутники и ру.и на тот случай если пропадут только спутники,но ру работает,
можна ли будет продолжить лететь в режиме стаба с потерявшимися спутниками.(мотор работать будет или нет)
(ну или скажем иначе,на взлете был 3д фикс ,потом пропал в полете, но ру работает.потом допустим и ру отвалился).хочется знать есть ли там адекватная реакция на это.как он будет отключать мотор планировать угол снижения крен.можно ли это там настроить
Что-то не могу понять, как в версии 1.6 изменить реверс серв… В разделе Servos чтобы не менял, поведение серв (конфигурация - летающее крыло) не меняется…Причем выставленные рейты и т.д. не сохраняются при нажатии на Save!!! Вернее, наверху проскакивает надпись о записи в память, но самой записи не происходит 😦 Прошу помощи зала!!!
Разобрался, реверс можно только через CLI сделать, по другому - никак
Как прошить quanton?
QUANTON только через SWD, его в загрузчик загнать нереально
Ребята, напомните пожалуйста, чтобы исключить “эффект маятника” при отпускании стика во время полёта в режиме позхолд, надо уменьшить параметр Posr - P? Я бы хотел, чтобы коптер тормозил но не искал пролетевшую точку, а пусть бы там и оставался где затормозил. Или Увеличить Д, если “вспомнить о свойствах пидов” ?
Обычные я вроде почти победил, не знаю на сколько это верно, но у меня вышло 84-28-220 (хотя выше 200 крутилкой не крутилось, а вручную выставилось). Не трясёт на улице.
Собираюсь завтра испытать своего летуна. Скажите пожалуйста, можно ли без компа и телеметрии откалибровать компасс на улице? Там тумблер какой назначить? Как узнать что калибровка прошла нормально?
Попробуйте с пульта запустить калибровку (ранее в теме была картинка с комбинациями стиков) Но, вроде бы, в айНАВе не действует, кажись пробовал, но утверждать не буду. Сигнал о завершении калибровки - два коротких “пика”. Начало - один “пик”
Собираюсь завтра испытать своего летуна. Скажите пожалуйста, можно ли без компа и телеметрии откалибровать компасс на улице? Там тумблер какой назначить? Как узнать что калибровка прошла нормально?
Можно войти в режим калибровки комбинацией стиков.
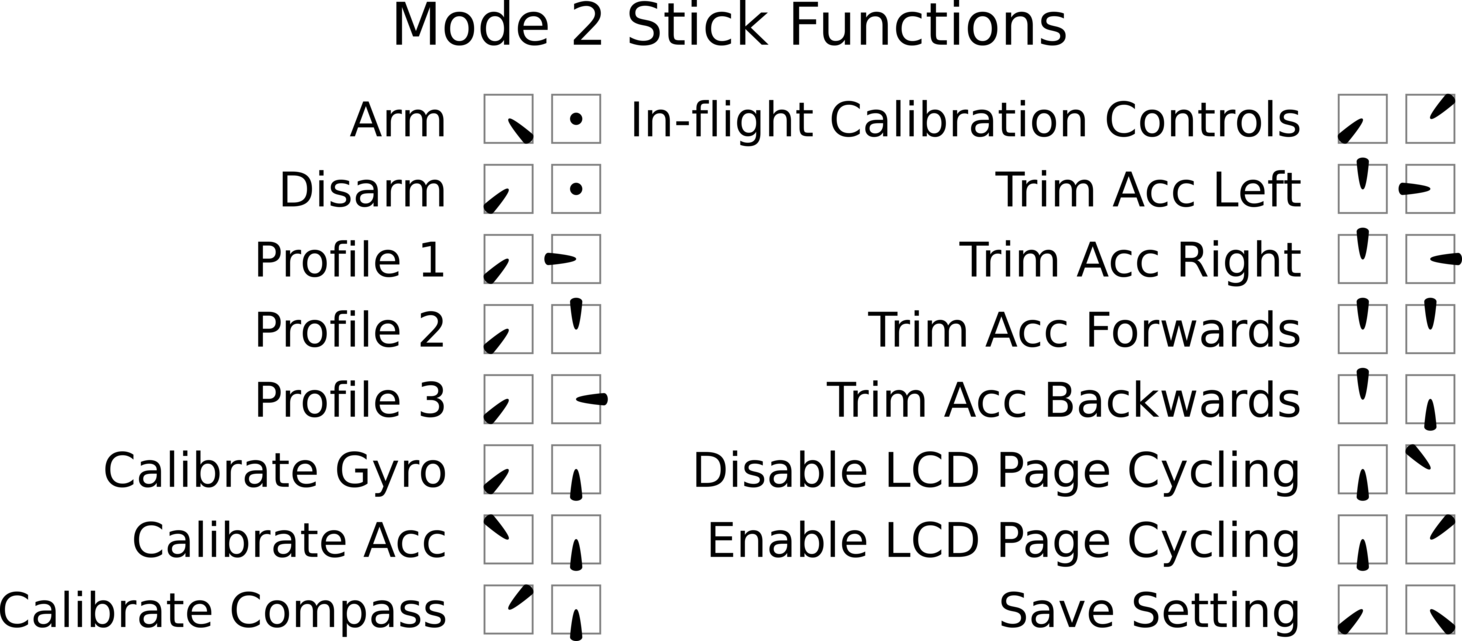
После запуска калибровки красный светодиод начнет часто мигать и будет это делать до окончания калибровки (30 сек)
После калибровки нужно будет посэйвить новые офсеты разводом стиков в разные стороны (буззер должен пикнуть).
Как узнать - взлететь, поймать спутники и включить GPS-hold
Что-то не могу понять, как в версии 1.6 изменить реверс серв… В разделе Servos чтобы не менял, поведение серв (конфигурация - летающее крыло) не меняется…Причем выставленные рейты и т.д. не сохраняются при нажатии на Save!!! Вернее, наверху проскакивает надпись о записи в память, но самой записи не происходит 😦 Прошу помощи зала!!!
Разобрался, реверс можно только через CLI сделать, по другому - никак
я изменял реверс серв без входа в CLI.и все работает.в 1.6 альфа 2
прошил себе его вчера.чето хвалили ртх и файл сейв.я повелся.зашел в раздел файл сейв,
и не нашел там возможности задействовать aux чтобы назначить ртх например как это работает в 1.4 и 1.5.это печалька.прошился на 1.5 обратно.
нехочу я такой файл сейв.я думал чтото с исчезновением спутников сдеделали ,какую нибудь аварийную посадку.а вернутся домой с отключеным пультом на 1.4 или 1.5 легко можно.даже если на РУ нет кнопочки файл сейв.
может в стабильной версии все будет…и еще …в разделе файл сейв есть питч ,ролл.можно как то назначить угол для снижения по крену и тангажу.
а то холд и авто.мало понятно что будет.проверять рискуя самолетом неохота.
еслиб еще эти крены привязать как то к отсутстию 3д фикса и остсутсявия сигнала ру
Всем доброго времени суток. Кто знает (наверное, вопрос больше к автору прошивки) - насколько нужен компас для летающего крыла (самолета)? Т.е. вопрос в том, оставить его или отключить? Или данных только от ГПС недостаточно для РТХ?
Прошу прощения за ламерский вопрос: пытаюсь прошить cc3d под inav уже два дня, но не выходит ничего. Ткните носом в более менее свежий видеоурок или статью на эту тему. У Юлиана смотрел, он SPF3 прошивает на раз-два, а у меня с cc3d то Failed to open serial port, то No response from bootloader.