Вопросы по iNav

Как прошить quanton?
QUANTON только через SWD, его в загрузчик загнать нереально
Ребята, напомните пожалуйста, чтобы исключить “эффект маятника” при отпускании стика во время полёта в режиме позхолд, надо уменьшить параметр Posr - P? Я бы хотел, чтобы коптер тормозил но не искал пролетевшую точку, а пусть бы там и оставался где затормозил. Или Увеличить Д, если “вспомнить о свойствах пидов” ?
Обычные я вроде почти победил, не знаю на сколько это верно, но у меня вышло 84-28-220 (хотя выше 200 крутилкой не крутилось, а вручную выставилось). Не трясёт на улице.
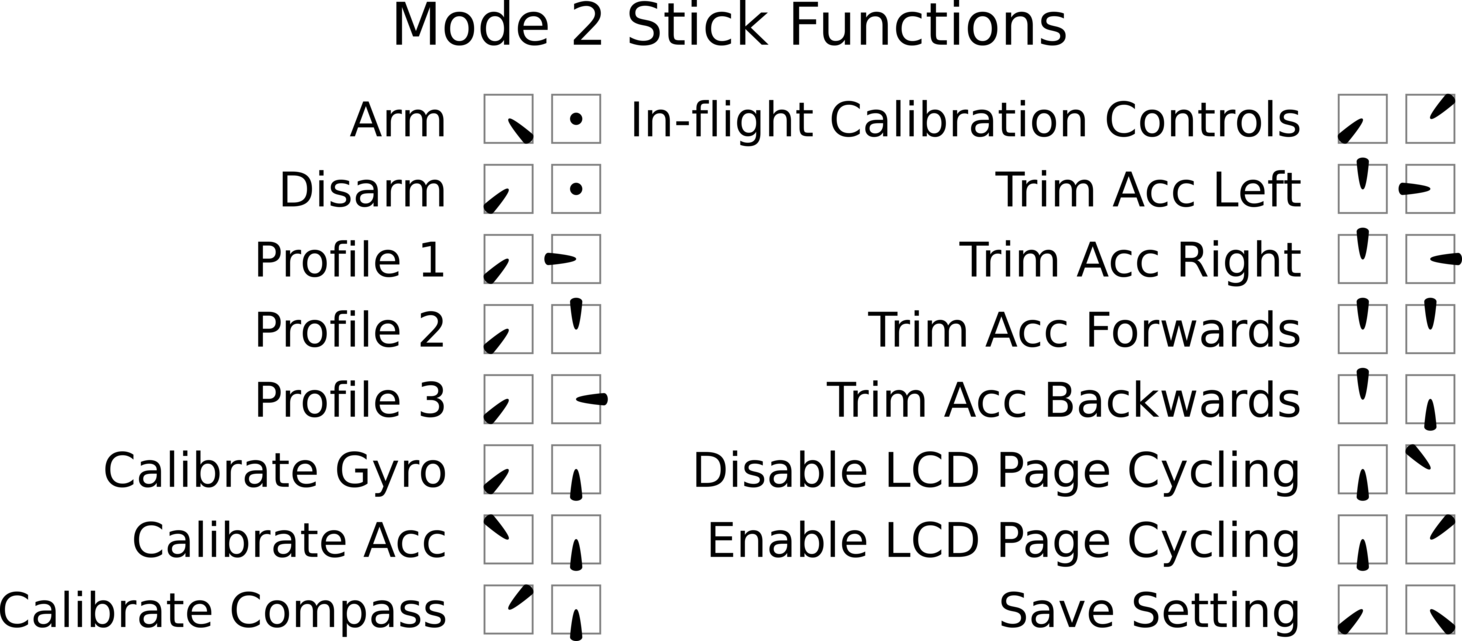
Собираюсь завтра испытать своего летуна. Скажите пожалуйста, можно ли без компа и телеметрии откалибровать компасс на улице? Там тумблер какой назначить? Как узнать что калибровка прошла нормально?
Попробуйте с пульта запустить калибровку (ранее в теме была картинка с комбинациями стиков) Но, вроде бы, в айНАВе не действует, кажись пробовал, но утверждать не буду. Сигнал о завершении калибровки - два коротких “пика”. Начало - один “пик”
Собираюсь завтра испытать своего летуна. Скажите пожалуйста, можно ли без компа и телеметрии откалибровать компасс на улице? Там тумблер какой назначить? Как узнать что калибровка прошла нормально?
Можно войти в режим калибровки комбинацией стиков.
После запуска калибровки красный светодиод начнет часто мигать и будет это делать до окончания калибровки (30 сек)
После калибровки нужно будет посэйвить новые офсеты разводом стиков в разные стороны (буззер должен пикнуть).
Как узнать - взлететь, поймать спутники и включить GPS-hold
Что-то не могу понять, как в версии 1.6 изменить реверс серв… В разделе Servos чтобы не менял, поведение серв (конфигурация - летающее крыло) не меняется…Причем выставленные рейты и т.д. не сохраняются при нажатии на Save!!! Вернее, наверху проскакивает надпись о записи в память, но самой записи не происходит 😦 Прошу помощи зала!!!
Разобрался, реверс можно только через CLI сделать, по другому - никак
я изменял реверс серв без входа в CLI.и все работает.в 1.6 альфа 2
прошил себе его вчера.чето хвалили ртх и файл сейв.я повелся.зашел в раздел файл сейв,
и не нашел там возможности задействовать aux чтобы назначить ртх например как это работает в 1.4 и 1.5.это печалька.прошился на 1.5 обратно.
нехочу я такой файл сейв.я думал чтото с исчезновением спутников сдеделали ,какую нибудь аварийную посадку.а вернутся домой с отключеным пультом на 1.4 или 1.5 легко можно.даже если на РУ нет кнопочки файл сейв.
может в стабильной версии все будет…и еще …в разделе файл сейв есть питч ,ролл.можно как то назначить угол для снижения по крену и тангажу.
а то холд и авто.мало понятно что будет.проверять рискуя самолетом неохота.
еслиб еще эти крены привязать как то к отсутстию 3д фикса и остсутсявия сигнала ру
Всем доброго времени суток. Кто знает (наверное, вопрос больше к автору прошивки) - насколько нужен компас для летающего крыла (самолета)? Т.е. вопрос в том, оставить его или отключить? Или данных только от ГПС недостаточно для РТХ?
Прошу прощения за ламерский вопрос: пытаюсь прошить cc3d под inav уже два дня, но не выходит ничего. Ткните носом в более менее свежий видеоурок или статью на эту тему. У Юлиана смотрел, он SPF3 прошивает на раз-два, а у меня с cc3d то Failed to open serial port, то No response from bootloader.
и не нашел там возможности задействовать aux чтобы назначить ртх например как это работает в 1.4 и 1.5.это печалька.прошился на 1.5 обратно.
Напоминаю о том, как правильно настраивать возврат домой по потере сигнала РУ:

а кто может рассказать что нового в 1.6 для лк.
есть ли там чтото,на тот случай если пропадут спутники и ру.и на тот случай если пропадут только спутники,но ру работает,
можна ли будет продолжить лететь в режиме стаба с потерявшимися спутниками.(мотор работать будет или нет)
(ну или скажем иначе,на взлете был 3д фикс ,потом пропал в полете, но ру работает.потом допустим и ру отвалился).хочется знать есть ли там адекватная реакция на это.как он будет отключать мотор планировать угол снижения крен.можно ли это там настроить
Failsafe срабатывает только по потере РУ. Если настроен RTH и спутники отсутствуют - аппарат сядет. Параметры снижения задаются в CLI:
set failsafe_fw_roll_angle = -200
set failsafe_fw_pitch_angle = 100
set failsafe_fw_yaw_rate = -45
Умолчания - крен влево на 20гр, пикирование с углом 10гр, рысканье по курсу влево со скоростью 45гр/сек
Всем доброго времени суток. Кто знает (наверное, вопрос больше к автору прошивки) - насколько нужен компас для летающего крыла (самолета)? Т.е. вопрос в том, оставить его или отключить? Или данных только от ГПС недостаточно для РТХ?
Для ЛК компас не нужен. Достаточно данных ГПС для РТХ.
Прошу прощения за ламерский вопрос: пытаюсь прошить cc3d под inav уже два дня, но не выходит ничего. Ткните носом в более менее свежий видеоурок или статью на эту тему. У Юлиана смотрел, он SPF3 прошивает на раз-два, а у меня с cc3d то Failed to open serial port, то No response from bootloader.
Прошейте сначала в Cleanflight с заливкой бутлоадера, а потом в Inav. На YouTube куча видео уроков.
В inav пока нет возможности автоматической посадки или возврата домой при низком напряжении на акуме? Например при напряжение в 6 и ниже вольт мозги и регули могут глючить, один регуль может отключиться первым…
Только каким-то чудом не потерял коптер. Обозревая просторы в режиме POSHOLD тихонько вращался по яву и он вдруг втопил куда-то вдаль. Оказалось что еще через 2 секунды после взлета отказал компас. Замерли показания от него. Остальные датчики на I2C работали нормально и вручную удалось его вернуть.
Вопрос. Можно ли на OSD как нибудь факт отказа компаса увидеть. У меня вытащено на экран все что умеет показывать но по ним косяка так и не видно.
BlackBox полет 7 последний.
Прошито 1.5.1.
Сейчас компас работает. Полет был при -5. Может замерз.
Вопрос. Можно ли на OSD как нибудь факт отказа компаса увидеть. У меня вытащено на экран все что умеет показывать но по ним косяка так и не видно.
Определение отказов компаса и их корректная обработка - слишком масштабное изменение кода, уже есть в планах на версию 1.7.
В inav пока нет возможности автоматической посадки или возврата домой при низком напряжении на акуме?
Пока нет.
Ребята подскажите.
Есть ПК SR Racing F3 Acro. Вот такой. seriouslypro.com/spracingf3
Прошита 1.5.1.
Приемник X8R по SBUS в порт IO-2
Gps подключен к UART2. OSD(micro minim OSD) к UART1.
Когда подключена OSD через юсб нет соединения с ПК.
Куда и как лучше повесить ОСД что бы было все подключено и можно было нормально конфигуратором пользоваться.
Спасибо.
и он вдруг втопил куда-то вдаль. Оказалось что еще через 2 секунды после взлета отказал компас.
Вот так и летай без фпв… жесть. Хорошо еще если видимость прямая и руки такие же, а то…
нет возможности автоматической посадки или возврата домой при низком напряжении на акуме
Тоже с нетерпением жду такого. Хоть ищи кого-то, шарящего в ардуинах, чтобы придумал нечто включающее по низкому напряжению РТХ.
С тряской своего чуда разобрался/победил (вроде), в слабенький ветер висит почти ровно. А вот с пролётом точки по жпс пока никак. Всё по рекомендациям автора и коллег (уменьшал позР Р, уменьшал и увеличивал Д) но пролетает подлец и нехотя возвращается метра 3-5. Ну хоть нет “эффекта колокола” многократного. Попробую еще.
Забыл спросить: может из-за наличия сериалпорта начаться глюк барометра? На скрине такого раньше небыло (с баро не делал ничего, только подключался к разъёмам и активировал сериалпорты) В реальности выражается в долесекундном увеличении оборотов даже сразу после арминга, а в полёте по высоте пытается иногда подпрыгивать (незаметно почти, сантиметров на 20-30)
Когда подключена OSD через юсб нет соединения с ПК.
Об этом не раз писалось в теме. Или вешать ОСД на софтсериал или не подключать РХ на ПК. Я сделал через кнопку полное отключение (оба провода разрываются), но у меня на первом уарте тереметрия, а она и во включенном состоянии не мешает коннектиться с компом.
Напоминаю о том, как правильно настраивать возврат домой по потере сигнала РУ:
Failsafe срабатывает только по потере РУ. Если настроен RTH и спутники отсутствуют - аппарат сядет. Параметры снижения задаются в CLI:
set failsafe_fw_roll_angle = -200 set failsafe_fw_pitch_angle = 100 set failsafe_fw_yaw_rate = -45Умолчания - крен влево на 20гр, пикирование с углом 10гр, рысканье по курсу влево со скоростью 45гр/сек
у меня простая аппа РУ hk6ta у нее нет кнопочки файл сейв…нет rssi
будет ли работать правильная настройка файл сейва на моей аппаратуре.если нет …мне от нее мало проку.менять аппу я не буду.тем боллее что при отсутсвии сигнала РУ крыло будет лететь домойв ртх (про помощи старого меню).возможно посадка если отвалятся спутники не получится.
тогда повторюсь для уточнения. правильная настройка файл сейва как вы показали на картинке.в сочетании с моей аппой.сработает файл сейв потом ртх .полет домой и посадка.и при при пропадании спутников посадка с креном 20градусов и по таншажу 10.видимо это можно проверить только в зармленом состоянии при 3д фикс.я выключу пульт подожду секунд 20 или сколько пропишу в настройках включится ртх.и если прикрыть рукой гпс к примеру.то самолет будет стремится крену и опустить нос
я правильно понял
Хоть ищи кого-то, шарящего в ардуинах, чтобы придумал нечто включающее по низкому напряжению РТХ.
А самому тумблер щёлкнуть не?
не. За каким?
Если коптер от меня в 20м я уже не слышу стандартную пищалку на нём. А если это намёк на фпв, то уж простите, не стОит.
у меня простая аппа РУ hk6ta у нее нет кнопочки файл сейв…нет rssi
И настройки ФС прямо на пульте на какой-нить канал тоже нет?
не. За каким?
Если коптер от меня в 20м я уже не слышу пищалку на нём. А если это намёк на фпв, то уж простите, не стОит.И настройки ФС прямо на пульте на какой-нить канал тоже нет?
а если аппа отвалилась замерз аакумулятор или еще какая причина
в 20м я уже не слышу
даже стесняюсь спросить,что за пищалка.