Вопросы по iNav

В версии 1.6 логика работы PID-контроллера для самолетов сильно поменялась (как и принцип тюнинга).
А можете скинуть ссылку, где описаны измениния и принцип тюнинга?
Ошибки компаса все равно будут. У меня было ровно то же самое, вроде работает. но иногда то унитаз внезапный, то РТХ далеко не туда, куда надо. Проверка, о которой я писал, показывает нет ли в целом проблем с компасом. Но в идеале ее нужно бы провести в полете на заармленом коптере (только как?), потому как шумы в сети от моторов и текущие в эти моторы большие токи явно имею большое влияние на поведение компаса, когда он не достаточно удален от проводки и всего, в чем течет ток. У вас 100% пробелма не в gps, так как Inav при потере спутников во время ртх останавливает коптер и начинает его спускать, при позхолде переходит в стаб, но в обоих случаях точно не летит в сторону.
Дистанция до дома в плоскости. То есть даже если в километре над землей подлетите к координатам старта, то будет 0 или около. То, что цифра скачет - это погрешность gps.
Сегодня сделал 5 полетов и тестирование режимов. Все 5 полетов коптер отлично себя вел при условии, что 6 и более спутников в наличии. Как только спутников 5 и менее, в режиме позхолд коптер начинает уводить в сторону. Как только увеличивается кол-во спутников до 6, сразу возращается на место, где был включен режим позхолд. А курс не меняется в полете (совпадает с OSD и телеметрией на телефоне и визуально. Заметил, что и спутники моя GPS антенна ловит при первом запуске минут 10 до 3D Fix. Использую вот эту flymod.net/item/gps_mini_ublox_7_naze32 . Завтра попробую поменять на более продвинутый и продолжу тест flymod.net/…/hj_ublox_neo-m8n_gps_module_compass Выпаивать компас пока не буду (не кидайте помидорами), всегда успею
Сегодня сделал 5 полетов и тестирование режимов. Все 5 полетов коптер отлично себя вел при условии, что 6 и более спутников в наличии. Как только спутников 5 и менее, в режиме позхолд коптер начинает уводить в сторону. Как только увеличивается кол-во спутников до 6, сразу возращается на место, где был включен режим позхолд.
6 спутников - это абсолютный минимум для работы навигации. При 5 и менее спутников работа навигации просто отключается и коптер начинает дрейфовать.
А можете скинуть ссылку, где описаны измениния и принцип тюнинга?
Этот GPS-модуль - худшее, что можно найти 😁
Этот GPS-модуль - худшее, что можно найти 😁
Да я уже это понял, выкинул безвозвратно. Единственное не могу решиться на удаление встроенного компаса на SP F3 Deluxe. Боюсь, что при нагреве феном ножки на соседних схемах отпадут и потом ищи проблему… Да и не понял, куда компас наружный подключать( два провода)? Может кто то ткнуть пальцем?

Да и не понял, куда компас наружный подключать( два провода)? Может кто то ткнуть пальцем?
У Вас схема верхних разъемов, а I2C на нижней стороне. Нижняя сторона есть в мануале seriouslypro.com/…/SPRacingF3-Manual-latest.pdf на 5й странице, там указана распиновка I2C.
А что касается компаса - если феном с достаточно узкой насадкой, не превышая температуру, и осторожно - никуда соседние микрухи не денутся (да они в принципе никуда не денутся, даже если полностью прогреть одну или даже две стороны). Можно еще их заклеить алюминиевым скотчем для профилактики (и пластиковые разъемы тоже - вот они реально могут пострадать, если попадут под струю). Конечно, в идеале потренироваться на чем-нибудь ненужном с похожими корпусами, если опыта нет.
Этот GPS-модуль - худшее, что можно найти 😁
Из коробки модуль видимо для чего-то другого. Чтобы заставить его более-менее работать, видеть больше спутников - нужен конфиг. Инструкция для подключения его к INAV.
Чтобы заставить его более-менее работать, видеть больше спутников - нужен конфиг
Конфиг не обязателен, INAV сам сконфигурирует модуль как нужно. Кроме того, у этого модуля крайне дохлая батарейка и конфиг он все равно забудет максимум через сутки.
Конфиг не обязателен, INAV сам сконфигурирует модуль как нужно. Кроме того, у этого модуля крайне дохлая батарейка и конфиг он все равно забудет максимум через сутки.
Батарейка ставится от нокии. Можно узнать что INAV ему отправляет для настройки?
Можно узнать что INAV ему отправляет для настройки?
Зависит от настроек самого INAVа. В двух словах - выставляет “Dynamic Model” и прочие параметры сообщения CFG-NAV5, частоту обновления, SBAS, отключает ненужные сообщения.
Не вижу смысла мучить Neo7 с хреновой антенной при наличии в продаже Neo8 с неплохой антенной за вменяемые деньги.
Кстати, меня все мучает вопрос про внешний компас - на других прошивках (Naze, LibrePilot), как я помню, при установке внешнего компаса указывается его смещение относительно стандартного компаса (или некоей центральной точки, не помню), а в iNAV такого не нашел. Соответственно, вопрос - это я плохо искал, или прошивка настолько умная, что ей по барабану смещение компаса?
Соответственно, вопрос - это я плохо искал, или прошивка настолько умная, что ей по барабану смещение компаса?
И у Назы и прочих вычислениями занимается фильтр Калмана, который крайне негативно относится к любым расхождениям в показаниях датчиков. У нас альфа-бета фильтр, который конечно не такой “умный”, зато намного более устойчивый к погрешностям.
Как показали тесты все летает великолепно даже если GPS вынести на хвост за пределы коптера.
И у Назы и прочих вычислениями занимается фильтр Калмана, который крайне негативно относится к любым расхождениям в показаниях датчиков. У нас альфа-бета фильтр, который конечно не такой “умный”, зато намного более устойчивый к погрешностям.
Как показали тесты все летает великолепно даже если GPS вынести на хвост за пределы коптера.
Понял, спасибо, а то мне все этот вопрос покоя не давал.
2jShadow:
Константин, не могли бы вы всё-таки прокомментировать особенности отключения двигателей в авторежимах, описанные в моём посте?
Конфиг не обязателен, INAV сам сконфигурирует модуль как нужно. Кроме того, у этого модуля крайне дохлая батарейка и конфиг он все равно забудет максимум через сутки.
С коробки он совсем не хотел работать. Настраивал пошагово, как на этом видео
но все равно минут 10-15 ждал 3D Fix под открытым небом. Да, последующие подключения были быстрее, но на следующий день все повторялось. Ну и в полёте часто терялись спутники. Вообщем забываем про этот вариант навсегда. Сегодня поставил Neo8 и даже в гараже 9 спутников за 1 минуту! Теперь с компасом, отпаял я родной с ПК, теперь вопрос- идёт два провода (белый и коричневый), а распиновки нет. Как подключать- народным способом, наугад? После подключения, требуются дополнительные настройки, калибровка?
Как подключать- народным способом, наугад?
А почему бы и нет? Это линии данных, а не питания - в крайнем случае поменяете местами если не заработает.
Что за модуль такой, где контакты разъёма не подписаны? Или разъёма нет?
Как подключать- народным способом, наугад?
Если модуль в корпусе, можно попробовать разобрать корпус, и посмотреть плату - часто там указана распиновка.Но I2C можно и методом тыка - его так сложно попалить.
После подключения, требуются дополнительные настройки, калибровка?
Калибровка само собой, но перед этим, скорее всего, нужно будет выставить поворот компаса - скорее всего, он как обычно стоит на нижней стороне платы, да еще и повернут. Тут тоже, либо посмотреть, как он расположен на плате, либо методом тыка. Ну а дальше уже проверять, что направление верно показывает, и что оно не уплывает при наклонах и поворотах.
Всем добрый день. Есть turnigy 9x, модуль связи FrSky X4R и автопилот SPRacing F3. В аппе с делан телеметрийный мод и прошита альтернативная прошивка. В итоге на экране аппы имею показания уровня связи и всё… Хочу видеть данные GPS (координаты). FrSky X4R и SPRacing F3 соединены так: в SPRacing F3 включено отображение телеметрии и выбран софтсериал2, TX и RX этого сериала соединены между собой и подключены к smart port FrSky X4R. В SPRacing F3 включал разные скорости, инвертировал сигнал… ничего не помогает. ЧТО я делаю не так??? (убил сегодняшний день на это)
Если модуль в корпусе, можно попробовать разобрать корпус, и посмотреть плату
В моём модуле она такая:
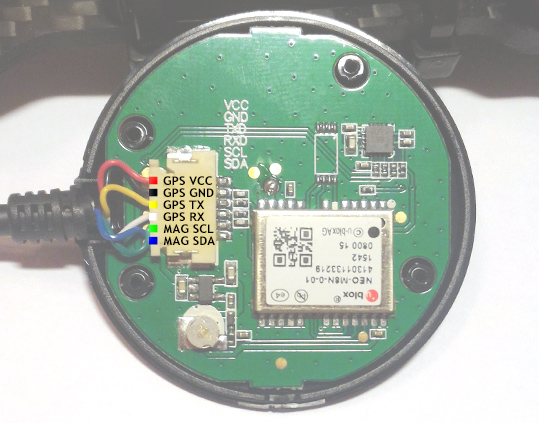
Поворот компаса для этого модуля, если правильно помню - CW270 Flip
В аппе с делан телеметрийный мод и прошита альтернативная прошивка.
Полагаю, что проблема не в полётнике. Что за модуль в аппе? DJT или XJT?
Если DJT, то взять что-либо с приёмника X-серии не получится, кроме уровня сигнала.
Константин, не могли бы вы всё-таки прокомментировать особенности отключения двигателей в авторежимах, описанные в моём посте?
Все так, как написано. Предполагается, что пилот, использующий MOTOR_STOP понимает что он делает.