Вопросы по iNav

Подскажите, какие навигационные пиды подкрутить.
Крыло в режиме RTH не хочет лететь точно в сторону дома.
Оно разворачивается в сторону дома, но сильно промахивается, делает крен в обратную сторону, опять промахивается и такими волнами летит в сторону дома. Промах градусов 30-45 примерно.
Подскажите, какие навигационные пиды подкрутить.
Крыло в режиме RTH не хочет лететь точно в сторону дома.
Оно разворачивается в сторону дома, но сильно промахивается, делает крен в обратную сторону, опять промахивается и такими волнами летит в сторону дома. Промах градусов 30-45 примерно.
Прошивка какая?первое убери в жпс все склонения и прочие настройки.
Поменял полетный контролер на MATEK 405STR. На прошивке от бариса все хорошо работает.
Перепрошил на Inav без дополнительных режимоа (только акро и горизонт включены). Все работает хорошо пока не включишь в конфигураторе подсветку (которая на борисе работала без вопросов).
Квадрик перестает армится плюс, подсветка не горит.
Может кто нибудь сталкивался с этой проблемой?
Прошивка какая?первое убери в жпс все склонения и прочие настройки.
1.6, которая последняя с пидами.
В жпс никаких особых настроек не выставлено.
1.6, которая последняя с пидами.
Последняя с пидами 1.5, ащет… 😉
1.6, которая последняя с пидами.
В жпс никаких особых настроек не выставлено.
Попробуй прошится на 2.1 ибо в 2.0 была эта проблема решена,если нет то нужно будет увеличивать навигационные пиды хотя сейчас оно и в стоке норм летает
Последняя с пидами 1.5, ащет… 😉
Описка, 1.5, верно 😃
Попробуй прошится на 2.1 ибо в 2.0 была эта проблема решена,если нет то нужно будет увеличивать навигационные пиды хотя сейчас оно и в стоке норм летает
Не смог добиться с piff контроллером устраивающего меня полета. Вернулся на pid, соответственно выше 1.5 не хочу прошиваться.
Раньше возвращался нормально, но потом поменял контроллер на похожий F3, старый сгорел. На этом то ли настройки другие, то ли что. Больше из железа ничего не менялось.
Какие именно пиды нужно повышать?
Вот пример видео возврата домой с курсовой камеры
То что я говорил тут не причем ,стрелка норм отрабатывает самоль не успевает за стрелкой ,а как он вообще летает в стабе против ветра?может обычных пидов не хватает р конкретно чтобы онтрезче реагировал
Вот пример видео возврата домой с курсовой камеры
Вы еще с иглом деревом домой не возвращались 😃
То что я говорил тут не причем ,стрелка норм отрабатывает самоль не успевает за стрелкой ,а как он вообще летает в стабе против ветра?может обычных пидов не хватает р конкретно чтобы онтрезче реагировал
В стабе летает вроде нормально. Раньше навигационные пиды не крутил и самолет возвращался нормально, а щас даже не знаю, на что грешить.
Господа моделисты приветствую. Никого нет с Уфы кто возьмется настроить мне этот айнав на крыле? Понимаю что звучит бредово, но к майским хотелось бы взять крыло на дачу, поосваивать, боюсь не успею я айнав хотя бы кривобоко настроить… Времени совсем нет осваивать мануалы и инструкции к прошивке и настройке. АП матек 405 стр, крыло z84. В лс если есть кто пожалуйста
В конфигураторе Inav 2.1.4 нет кнопки калибровки компаса.
Как откалибровать компас?
В конфигураторе Inav 2.1.4 нет кнопки калибровки компаса.
Не ерундите
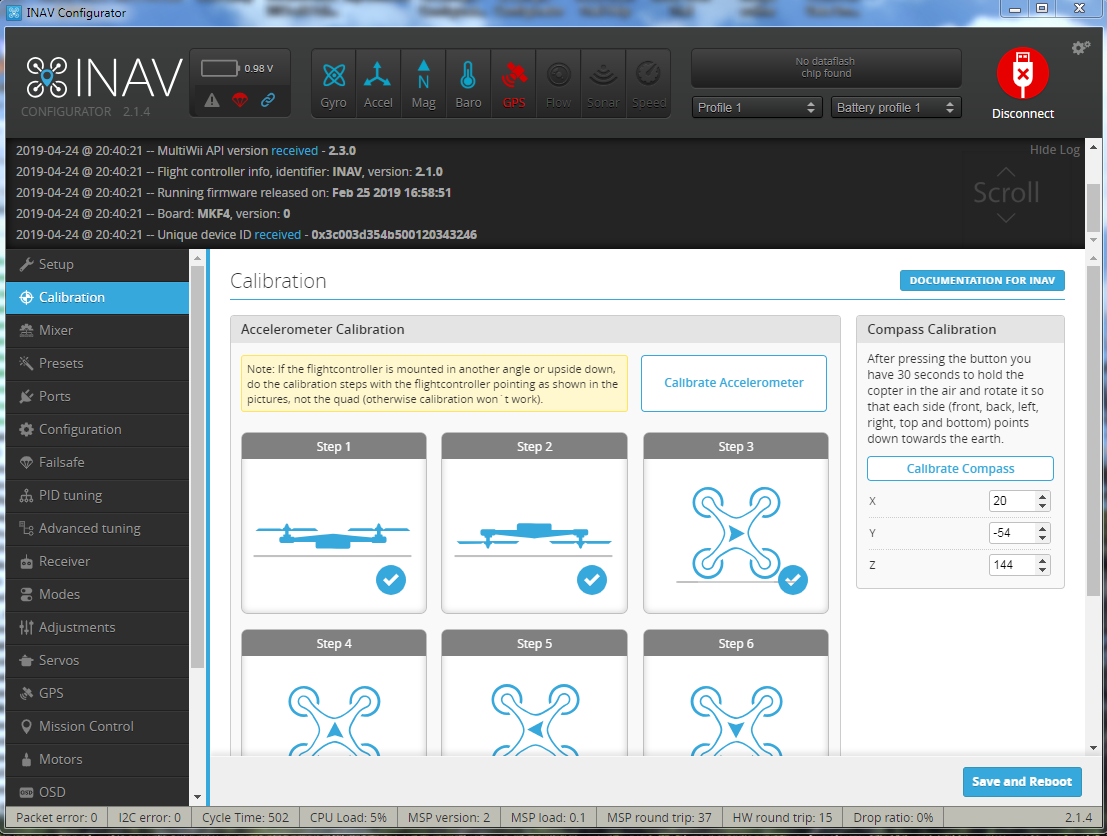
Как откалибровать компас?
Например, комбинацией стиков (мануал в помощь).
Попробуй прошится на 2.1 ибо в 2.0 была эта проблема решена,если нет то нужно будет увеличивать навигационные пиды хотя сейчас оно и в стоке норм летает
Дмитрий, а почему вы решили, что жпс пиды надо повышать? Вообще-то когда идет перекомпенсация (промах) с последующим демпфированием и снова перекомпенсацией (возврат с очередным промахом) надо понижать навигационный П пид и увеличивать навигационный Д пид.
Собрал и настроил квадрик. Полетник Matek 405ctr работает под Inav2.1.4. GPS
Радиолинк TS100. Квадрик без проблем летает в режиме акро и горизонт. GPS ловит 10-12 спутников. В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок. Компас развернул на 270 градусов и откалибровал на улице. В чем может быть проблема?
Не надо ничего разворачивать. Компас поставить стрелкой вперед, в конфигураторе выбрать ориентацию компаса CW270FLIP. Тогда все полетит.
В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок.
В альтхолде он и не должен держать позицию - только высоту.
Улёт в позхолде - это неправильная настройка компаса либо неправильная калибровка компаса либе наводки на компас (металл, магнит, ВЧ от HD-камеры)
Компас развернул на 270 градусов и откалибровал на улице.
А адеквастность работы после всего этого проверяли? Поставить на землю, поворотом добиться “севера” по OSD или телеметрии, проверить на совпадение с реальным севером, повернуть на восток, юг, запад и проверить получающиеся азимуты (90-180-270). Если крутятся не в ту сторону - нужен flip в параметрах ориентации компаса. Если сдвиг на “кратно 90” - опять же поправить его в параметрах ориентации. Если показания неадекватны - разбираться с наводками от “железа” или ВЧ.
P.S. Одновременные альтхолд и позхолд не имеют смысла, так как в 2.х.х позхолд включает в себя альтхолд (доки читать надо!).
Проблема может быть связана с тем что компас прикреплен к раме под углом?
И еще у меня не включен режим стабилизации( есть только акро и горизонт).
Собрал и настроил квадрик. Полетник Matek 405ctr работает под Inav2.1.4. GPS
Радиолинк TS100. Квадрик без проблем летает в режиме акро и горизонт. GPS ловит 10-12 спутников. В режиме ALTHOLD и POSHOLD квадрик вообще не держит позицию, улетает резко вбок. Компас развернул на 270 градусов и откалибровал на улице. В чем может быть проблема?
Жпс модуль надеюсь на стойке не менее 10 см от рамы?
Горизонт тоже стабилизация.
И как вы представляете себе альтхолд в акро? 😃
Жпс модуль надеюсь на стойке не менее 10 см от рамы?
Это необязательно. У меня на тестовой змрке модуль приклеен на скотче к верхней палубе между hd-камерой и аккумом, а компас (отдельный модуль) также на скотче приклеен к “брюху”, где прекрасно заэкранирован карбоном двойной нижней палубы от помех электроники и “железа” литионных банок.